Académique Documents
Professionnel Documents
Culture Documents
Cahiers Des Charges ProgramI PDF
Cahiers Des Charges ProgramI PDF
Transféré par
aqua.laayouneTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Cahiers Des Charges ProgramI PDF
Cahiers Des Charges ProgramI PDF
Transféré par
aqua.laayouneDroits d'auteur :
Formats disponibles
Cahiers des charges Grafcet
Modules : Programmation des API
Mécatronique 2018/2019
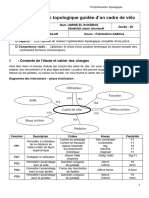
Une station de mélange se compose de trois cuves, contenant chacune un produit différent (A
B, C) et d’une cuve réceptrice (R).
Deux mélanges sont possibles :
-mélange 1 : A et B
-mélange 2 : A et C
Les produits doivent être déversés successivement. La quantité de chaque produit à déverser est
fixée par un temps de vidange différent.
TA=10s ; TB=15s ; TC=20s
Le cycle commence lorsque l’opérateur demande l’un des deux mélanges (l’appui sur BP1
pour le mélange1 et BP2 pour le mélange2) si les cuves correspondantes sont suffisamment
remplies (niveau intermédiaire a2, b2 et c2).
Le mélange s’évacue à l’aide de l’électrovanne EVR jusqu’à le vidange de réservoir R.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
1 / 65
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
2 / 65
Partie 2 :
Tri de caiss
Un dispositif automatique destiné à trier des caisses de deux tailles différentes (savons et
lessive) se compose d'un tapis amenant les caisses (tapis commun), de trois poussoirs (vérin
A, vérin B et vérin C) et de deux tapis d'évacuation (Tapis 1 et Tapis 2).
Pour effectuer la sélection des caisses, un dispositif de détection placé devant le poussoir A
permet de reconnaître sans ambiguïté le type de caisse qui se présente (p=1 et g=0 si petite
caisse, p=1 et g=1 si grande caisse).
Si la caisse est petite :
-Le poussoir Ä pousse la caisse devant le poussoir B qui à son tour les transfère sur le tapis
1.
Si la caisse est grande :
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
3 / 65
-alors la grande caisse est poussée devant le poussoir C, ce dernier les évacuant sur le tapis
2.
Remarque :
-le système démarre par action sur un bouton poussoir départ cycle Dcy.
-les 3 tapis commencent à tourner dès le départ de cycle et ils ne s’arrêtent qu’à la fin de
cycle.
-les positions des poussoirs sont connues par des capteurs de proximité : a0, a1, a2, b0, b1,
c0, c1
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Emboutissage tube de cuivre
Après appui sur dcy (départ cycle), on serre le tube par le vérin A. Puis on effectue la
première passe d'emboutissage par un aller-retour de B. Ensuite, le support du vérin B est
déplacé grâce à la sortie du vérin C, puis on effectue la deuxième passe d'emboutissage. On
desserre ensuite la pièce tout en remettant les vérins en position initiale, le vérin D doit
effectuer un marquage du tube.
Grâce à des distributeurs tels que celui schématisé à côté du vérin D, les vérins sont tous
"double effet" : la sortie du vérin A est notée A+, sa rentrée A-. Les capteurs de fin de course
du vérin sont notés a+ et a-.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
4 / 65
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
5 / 65
Transfert de pièces
L’appui sur le bouton dcy déclenche le cycle suivant :
-démarrage de tapis d’arrivée pour ramener les pièces, les pièces sont détectées par le capteur
S1.
-la présence d’une pièce devant le vérin A, provoque la sortie du vérin A pour la ramener
devant le vérin B
-le vérin B sort pour pousser la pièce sur le tapis d’évacuation
Remarque :
Les tapis sont entrainés par des moteurs asynchrones (M1 entraine le tapis d’arrivée, M2
entraine le tapis d’évacuation).
Le tapis d’évacuation est mis en marche dès le début de cycle et il s’arrête à la fin de cycle.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
6 / 65
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Alimentation d'une cisaille
Le bras de la cisaille s'avance, prend une plaque au niveau A, tourne ensuite en position haute
afin de poser cette plaque sur le tapis C, puis revient ensuite au point de départ.
Le départ du cycle est donné par l'opérateur mais cette information n'est pas prise en compte
tant qu'une plaque n'est pas présente au niveau A, que pince n'est pas ouverte et que le bras
n'est pas à gauche.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
7 / 65
Les actions à effectuer et les informations nécessaires au fonctionnement sont regroupées
dans le tableau suivant :
ACTIONS RECEPTIVITES
Sortir le vérin "Avance" 1V+ Départ de cycle S0
Rentrer le vérin "Avance" 1V- Bras en avant 1S1
Sortir le vérin "Fermer la pince" 2V+ Bras en arrière 1S0
Rentrer le vérin "Ouvrir la pince" 2V- Pince fermée 2S1
Sortir le vérin "Montée bras" 3V+ Pince ouverte 2S0
Rentrer le vérin "Montée bras" 3V- Bras en haut 3S1
Sortir le vérin "Rotation à gauche" 4V+ Bras en bas 3S0
Rentrer le vérin "Rotation à droite" 4V- Bras à gauche 4S1
Bras à droite 4S0
Présence plaque en A 5S0
Présence plaque en C 6S0
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
8 / 65
Partie 2 :
Manipulateur pneumatique
Le manipulateur pneumatique présenté ci-dessus est utilisé pour l’approvisionnement en tôles
d’une presse plieuse. Il est équipé de 3 mouvements (une rotation d’axe vertical et deux
translations) qui lui permettent d’effectuer le cycle suivant :
A partir du point 1, en appuyant sur un bouton DCY, et si une pièce est présente dans le
magasin (ppm = 1) il avance jusqu’au point 2 où il prend une pièce. Il va la présenter devant
la presse au point 5, en passant successivement aux points 3 et 4. Il la dépose ensuite dans la
presse au point 7 et il retourne à sa position initiale au point 1.
La rotation du manipulateur de 4 vers 5 est commandée par l’action R + et de 8 vers 1 par R -.
La translation vers l’avant est commandée par T+ et vers l’arrière par T-.
La translation vers le haut est commandée par V + et vers le bas par V -.
A chaque position 1 à 8 un capteur indique la présence du manipulateur. A ces capteurs sont
associés les variables pi.
Travail demandé :
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
9 / 65
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
10 / 65
Traitement de surface
Une installation de traitement de surface comprend un chariot automoteur desservant quatre
bacs, un poste de chargement et un poste de déchargement. Des capteurs _sq1_ à _sq6_
permettent le positionnement au-dessus des différents postes.
Initialement le chariot est à l’extrême droite en bas (sq1 et sq8 actionnés).
Après avoir accroché les pièces à traiter sur le cadre situé au point de chargement en position
basse, l'opérateur donne l'ordre de départ cycle (dcy). Le chariot doit alors effectuer le cycle
décrit sur la figure ci-dessus.
Quand les pièces arrivent au poste de déchargement, l’opérateur décharge le chariot et appuis
sur le bouton retour, le chariot alors retourne à sa position initiale.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
11 / 65
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Bain de dégraissage
Un chariot se déplace sur un rail et permet, en se positionnant au-dessus d'une cuve, de
nettoyer des pièces contenues dans un panier en les trempant dans un bac de dégraissage
pendant 30 secondes.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
12 / 65
Le chargement et le déchargement du panier s'effectuent manuellement en position haute, l'un
à la partie gauche (position S1), l'autre à la partie droite (position S3).
L'ordre de départ du cycle ainsi que l'information de fin de déchargement sont donnés
manuellement par l'opérateur (S6 et S7 respectivement).
Le chariot ne se déplace que le panier en position haute (S4= 1).
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
13 / 65
Cycle de fonctionnement :
Si on appuie sur le bouton de départ cycle (dcy) quand les têtes d'usinages sont en position
arrière, que les vérins d'éjection et de serrage sont reculés et qu'une pièce est présente, le
système serre la pièce.
On effectue alors simultanément les deux usinages.
- le fraisage (vérin F): la fraise avance en vitesse lente puis recule en vitesse rapide.
- le lamage (vérin A):
⎯ Le grain d'alésage avance en vitesse lente.
⎯ Une fois en fin de lamage on attend 1 seconde pour avoir un fond plat.
⎯ Le retour s'effectue alors en vitesse rapide.
Après cela la pièce est desserrée (vérin S) puis éjectée par le vérin E.
Remarques :
- Pour des raisons de simplicité, on ne tiendra pas compte du fonctionnement des moteurs de
broches d'usinages et de la vitesse d’entrée et de sortie des vérins.
- Les vérins A, F, E et S sont des vérins à double effet commandés par des distributeurs
bistables.
- Les capteurs de contrôle des mouvements sont :
. a0 et a1 pour le vérin d'alésage.
. e0 et e1 pour le vérin d'éjection.
. f0 et f1 pour le vérin de fraisage.
. s0 et s1 pour le vérin de serrage.
- Le capteur de présence pièce fonctionne comme suit:
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
14 / 65
. p = 1 : il y a une pièce dans le montage.
. p = 0 : il n'y a pas de pièce dans le montage.
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Partie 2 :
Considérons deux chariots, C1 et C2, qui peuvent se déplacer respectivement entre les points
A1 et B1, et A2 et B2, sur deux rails indépendants de longueur quelconque.
Ils sont équipés de capteurs de fin de course a1 et b1, et a2 et b2 conformément à la figure ci-
dessus. Les déplacements de ces chariots sont commandés par deux moteurs à deux sens de
rotation D1 et G1, et D2 et G2 respectivement.
Les vitesses des deux chariots sont également quelconques.
Lorsqu’un opérateur appuie sur le bouton m, et si les deux chariots sont en A1 et A2, alors
ceux-ci partent simultanément vers la droite, jusqu’à atteindre B1 et B2. Lorsque le chariot Ci
a atteint le point Bi, il revient immédiatement jusqu’en Ai.
Le cycle est terminé lorsque les deux chariots sont en Ai.
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
15 / 65
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Un poste de contrôle d'étanchéité se compose de deux verrous actionnés par des vérins et d'un
testeur formé d'un tube de mise sous pression avec un bourrelet d'étanchéité, également mû
par un vérin.
A l’état initial le vérin V2 est en avant et le vérin V1 est en arrière.
Quand on actionne un bouton à accrochage de départ de cycle le tapis commence à tourner
(MT).
Lorsqu'un bidon se présente (ppe), le verrou amont se ferme (V1+) puis le testeur descend
(V3+) et met le bidon sous pression (V4+).
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
16 / 65
➢ Si le bidon est étanche, la pression monte, Elle est détectée par un capteur de pression
(pat) qui autorise la montée du testeur (V3-) et l'ouverture du verrou aval (V2-)
jusqu’à l’évacuation du bidon.
Le cycle se termine par la fermeture du verrou aval et l'ouverture du verrou amont.
Le tapis d'alimentation tourne en permanence pendant le cycle.
➢ Si au bout de 4 secondes la pression n'est pas atteinte, le moteur de tapis s’arrête et un
voyant "Défaut d'étanchéité" s'allume(DE) : un opérateur ôte le bidon manuellement et
réarme le dispositif par un bouton poussoir de réarmement (m).
Action Pré-actionneur Information Capteur
Avance verrou amont V1+ Verrou amont en avant v11
Recul verrou amont V1- Verrou amont en arrière v10
Avance verrou aval V2+ Verrou aval en avant v21
Recul verrou aval V2- Verrou aval en arrière v20
Descente testeur V3+ Pression atteinte pat
Montée testeur V3- Testeur en haut v30
Envoi pression d'essai V4+ Testeur en bas v31
Défaut étanchéité DE Présence pièce en entrée ppe
Moteur de tapis MT Réarmement m
Départ cycle dcy
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
17 / 65
Malaxeur
Déroulement du cycle :
L’action sur le bouton « Départ Cycle » provoque simultanément le pesage des produits et
l’arrivée des briquettes de la façon suivante :
Dosage du produit A jusqu’au repère « a » de la bascule, puis dosage du produit B jusqu’au
repère « b » suivi de la vidange de la bascule C dans le malaxeur,
Arrivée de cinq briquettes.
Le cycle se termine par la rotation du malaxeur pendant 30 secondes et son pivotement, la
rotation du malaxeur étant maintenue pendant la vidange.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
18 / 65
Entrées Sorties
Dcy : bouton poussoir Départ de Cycle Vanne A : transfert du produit A dans la balance
Capteur z : la balance est vide Vanne B : transfert du produit B dans la balance
Capteur a : le produit A est dans la balance Vanne C : transfert du produit C dans le malaxeur
Capteur b : le produit B est dans la balance MR : moteur de rotation du fouet du malaxeur
MPD : moteur de pivotement du malaxeur à droite
Fin de course S0 : le malaxeur est en position haute
Fin de course S1 : le malaxeur est en position basse MPG : moteur de pivotement du malaxeur à gauche
Détecteur DP : le passage d’une brique est détecté MT : moteur du tapis des briques
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
19 / 65
Cycle de fonctionnement :
La broche tourne en permanence pendant tout le cycle grâce à un moteur MR.
L'opérateur ayant fixé la pièce donne alors l'information de départ du cycle (Dcy) :
Après une approche en grande vitesse le perçage s'effectue en petite vitesse, jusqu'à la
position b2,
La perceuse remonte à grande vitesse jusqu'à la position b1, elle descend ensuite pour un
reperçage à petite vitesse jusqu'à la position b3.
Dès le perçage terminé, la broche remonte en grande vitesse jusqu'à la position haute h.
La descente et la montée de la broche s'effectue grâce à un vérin.
Travail demandé :
1) Elaborer le grafcet niveau 2.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
20 / 65
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Perçage De Montants En Bois
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
21 / 65
Fonctionnement :
* le montant est mis en place manuellement.
* l'opérateur provoquera le départ de cycle de la machine en actionnant une pédale "p".
* les 2 actionneurs A brident la pièce.
* les 2 perçages sont percés successivement - d'abord le perçage vertical - puis le perçage
horizontal.
Remarque :
-Les moteurs de perçage (M1 et M2) sont mis sous tension dès le départ de cycle.
-a0 et a1 sont des capteurs de pression : le montant est correctement serré si le capteur a0 est
à l’état 1 et le retour complet du vérin A est capté par le capteur a1.
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
22 / 65
Unité de perçage
Description du fonctionnement
L'operateur place une pièce P à percer sur l'étau de serrage. L'action sur un bouton poussoir
S met en marche l’unité de perçage. Le cycle de fonctionnement est le suivant :
Serrer la pièce.
Percer la pièce.
Desserrer la pièce.
NB :
-La pièce est dégagée manuellement.
-La rotation de foret est maintenue pendant tout le cycle.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
23 / 65
Table des affectations :
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
24 / 65
Cycle de fonctionnement :
Si on appuie sur le bouton de départ cycle (dcy) quand les têtes d'usinages sont en position
arrière, que les vérins d'éjection et de serrage sont reculés et qu'une pièce est présente, le
système serre la pièce.
On effectue alors simultanément les deux usinages.
- le fraisage (vérin F) : la fraise avance en vitesse lente puis recule en vitesse rapide.
- le lamage (vérin A) :
⎯ Le grain d'alésage avance en vitesse lente.
⎯ Une fois en fin de lamage on attend 3 secondes pour avoir un fond plat.
⎯ Le retour s'effectue alors en vitesse rapide.
Après cela la pièce est desserrée (vérin S) puis éjectée par le vérin E.
Remarques :
- Pour des raisons de simplicité, on ne tiendra pas compte du fonctionnement des moteurs de
broches d'usinages et de la vitesse d’entrée et de sortie des vérins.
- Les vérins A, F, E et S sont des vérins à double effet commandés par des distributeurs
bistables.
- Les capteurs de contrôle des mouvements sont :
. a0 et a1 pour le vérin d'alésage.
. e0 et e1 pour le vérin d'éjection.
. f0 et f1 pour le vérin de fraisage.
. s0 et s1 pour le vérin de serrage.
- Le capteur de présence pièce fonctionne comme suit:
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
25 / 65
. p = 1 : il y a une pièce dans le montage.
. p = 0 : il n'y a pas de pièce dans le montage.
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Un poste de contrôle d'étanchéité se compose de deux verrous actionnés par des vérins et d'un
testeur formé d'un tube de mise sous pression avec un bourrelet d'étanchéité, également mû
par un vérin.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
26 / 65
A l’état initial le vérin V2 est en avant et le vérin V1 est en arrière.
Quand on actionne un bouton à accrochage de départ de cycle le tapis commence à tourner
(MT).
Lorsqu'un bidon se présente (ppe), le verrou amont se ferme (V1+) puis le testeur descend
(V3+) et met le bidon sous pression (V4+).
➢ Si le bidon est étanche, la pression monte, Elle est détectée par un capteur de pression
(pat) qui autorise la montée du testeur (V3-) et l'ouverture du verrou aval (V2-)
jusqu’à l’évacuation du bidon.
Le cycle se termine par la fermeture du verrou aval et l'ouverture du verrou amont.
Le tapis d'alimentation tourne en permanence pendant le cycle.
➢ Si au bout de 2 secondes la pression n'est pas atteinte, le moteur de tapis s’arrête et un
voyant "Défaut d'étanchéité" s'allume(DE) : un opérateur ôte le bidon manuellement et
réarme le dispositif par un bouton poussoir de réarmement (m).
Action Pré-actionneur Information Capteur
Avance verrou amont V1+ Verrou amont en avant v11
Recul verrou amont V1- Verrou amont en arrière v10
Avance verrou aval V2+ Verrou aval en avant v21
Recul verrou aval V2- Verrou aval en arrière v20
Descente testeur V3+ Pression atteinte pat
Montée testeur V3- Testeur en haut v30
Envoi pression d'essai V4+ Testeur en bas v31
Défaut étanchéité DE Présence pièce en entrée ppe
Moteur de tapis MT Réarmement m
Départ cycle dcy
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
27 / 65
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Malaxeur
Déroulement du cycle :
L’action sur le bouton « Départ Cycle » provoque simultanément le pesage des produits et
l’arrivée des briquettes de la façon suivante :
Dosage du produit A jusqu’au repère « a » de la bascule, puis dosage du produit B jusqu’au
repère « b » suivi de la vidange de la bascule C dans le malaxeur,
Arrivée de quatre briquettes.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
28 / 65
Le cycle se termine par la rotation du malaxeur pendant une minute et son pivotement, la
rotation du malaxeur étant maintenue pendant la vidange.
Entrées Sorties
Dcy : bouton poussoir Départ de Cycle Vanne A : transfert du produit A dans la balance
Capteur z : la balance est vide Vanne B : transfert du produit B dans la balance
Capteur a : le produit A est dans la balance Vanne C : transfert du produit C dans le malaxeur
Capteur b : le produit B est dans la balance MR : moteur de rotation du fouet du malaxeur
MPD : moteur de pivotement du malaxeur à droite
Fin de course S0 : le malaxeur est en position haute
Fin de course S1 : le malaxeur est en position basse MPG : moteur de pivotement du malaxeur à gauche
Détecteur DP : le passage d’une brique est détecté MT : moteur du tapis des briques
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
29 / 65
Tri de caisse
Un dispositif automatique destiné à trier des caisses de deux tailles différentes (savons et
lessive) se compose d'un tapis amenant les caisses (tapis commun), de trois poussoirs (vérin
A, vérin B et vérin C) et de deux tapis d'évacuation (Tapis 1 et Tapis 2).
Pour effectuer la sélection des caisses, un dispositif de détection placé devant le poussoir A
permet de reconnaître sans ambiguïté le type de caisse qui se présente (p=1 et g=0 si petite
caisse, p=1 et g=1 si grande caisse).
Si la caisse est petite :
-Le poussoir Ä pousse la caisse devant le poussoir B qui à son tour les transfère sur le tapis
1.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
30 / 65
Si la caisse est grande :
-alors la grande caisse est poussée devant le poussoir C, ce dernier les évacuant sur le tapis
2.
Remarque :
-le système démarre par action sur un bouton poussoir départ cycle Dcy.
-les 3 tapis commencent à tourner dès le départ de cycle et ils ne s’arrêtent qu’à la fin de
cycle.
-les positions des poussoirs sont connues par des capteurs de proximité : a0, a1, a2, b0, b1,
c0, c1
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Emboutissage tube de cuivre
Après appui sur dcy (départ cycle), on serre le tube par le vérin A. Puis on effectue la
première passe d'emboutissage par un aller-retour de B. Ensuite, le support du vérin B est
déplacé grâce à la sortie du vérin C, puis on effectue la deuxième passe d'emboutissage. On
desserre ensuite la pièce tout en remettant les vérins en position initiale, le vérin D doit
effectuer un marquage du tube.
Grâce à des distributeurs tels que celui schématisé à côté du vérin D, les vérins sont tous
"double effet" : la sortie du vérin A est notée A+, sa rentrée A-. Les capteurs de fin de course
du vérin sont notés a+ et a-.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
31 / 65
Travail demandé :
1) Elaborer le grafcet niveau 2.
2) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
3) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme.
4) enregistrer le programme dans un dossier spécifié.
5) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
32 / 65
Le niveau de liquide contenu dans un réservoir est contrôlé par trois détecteurs N1, N2, N3.
L'alimentation de ce réservoir s'effectue par trois pompes P1, P2, P3 de la façon suivante :
• si le niveau N1 est découvert (N1=0), une première pompe est mise en marche ;
• si le niveau N2 est découvert (N1=0, N2=0), une deuxième pompe est mise en marche ;
• si le niveau N3 est découvert (N1=0, N2=0, N3=0), la troisième pompe est mise en marche.
Le nombre de pompes en service sera égal au nombre de niveaux découverts. De plus afin
d'équilibrer l'usure des pompes, celles-ci seront permutées à tour de rôle.
Travail demandé :
1) Remplir le tableau suivant avec les désignations des capteurs et des préactionneurs de ce
système :
Capteurs Mnémonique Préactionneurs Mnémonique
des capteurs des préactionneurs
2) Elaborer le grafcet;
3) Affecter les entrées et les sorties aux adresses de l’automate utilisé ;
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
33 / 65
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
5) Elaborer le programme sur papier et le saisir sur le PC (remettre avec la feuille d’examen)
6) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme ;
7) Vérifier le fonctionnement du programme en présence de l’examinateur ;
La machine représentée sur la figure ci dessous, permet de fabriquer des gobelets à partir de
film plastique. La machine comprend :
• Un support pour la bobine de film plastique, entraîné en rotation dans un seul sens par le
moteur asynchrone triphasé M1 ;
• Une table de presse comportant un poinçon et un moule qui se déplacent verticalement
(montée et descente) à l'aide de deux vérins Vp ;
• Un découpeur qui coupe les gobelets par deux avec un porte-couteau qui se déplace
verticalement (montée et descente) à l'aide d’un vérin Vg ;
• Une caisse pour ranger dix gobelets.
Fonctionnement :
_ Au départ le film est placé sous la presse, la machine est mise en service par DCY et les
conditions initiales réalisées.
_ Afin de pouvoir réaliser un parfait moulage, la presse restera en position fermée pendant 15
secondes, puis le film avance d'un pas grâce au moteur M1.
_ Le poste de découpage est mis en service lorsqu’une détection de présence de pièces est
signalée.
_ Les gobelets après le découpage tombent dans la caisse par groupe de dix.
_ Quand la caisse contient dix gobelets la machine s’arrête, puis on remplace la caisse et la
machine pourra repartir après un appui sur DCY.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
34 / 65
Travail demandé :
1) Remplir le tableau suivant avec les désignations des capteurs et des préactionneurs de ce
système :
Capteurs Mnémonique Préactionneurs Mnémonique
des capteurs des préactionneurs
2) Elaborer le grafcet;
3) Affecter les entrées et les sorties aux adresses de l’automate utilisé ;
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
4) Elaborer le programme sur papier et le saisir sur le PC (remettre avec la feuille d’examen)
5) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme ;
6) Vérifier le fonctionnement du programme en présence de l’examinateur ;
7) Vérifier le bon fonctionnement en présence du formateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
35 / 65
Soit la figure suivante :
Les objets conditionnés (boîtes) arrivent par le couloir d’amenée de façon continue ; ils peuvent
rester en attente contre le retour du poussoir.
Lorsqu’une rangée est complète, le poussoir avance, poussant ainsi cette rangée ainsi que les
précédentes sur le plateau ou sur la couche précédente.
Lorsqu’une couche est complète, elle est recouverte d’une feuille de carton et le plateau descend
d’un pas ; la dernière couche n’est pas recouverte.
Lorsque la palette est complète (plateau en bas), le plateau remonte en position haute extrême,
la palette ainsi constituée est dégagée et l’opérateur peut l’évacuer cette évacuation n’est pas à
étudier.
Au repos le plateau est en position haute extrême, le poussoir est en avant, le bras de la ventouse
est reculé en position haute.
Le plateau a plusieurs positions :
- haute extrême (mise en place ou évacuation de la palette) ;
- haute (niveau de la première couche) ;
- intermédiaires (espacées d’un pas chacune) ;
- basse (niveau de la dernière couche).
Le cycle commence sur un ordre de l’opérateur.
Travail demandé :
1) Remplir le tableau suivant avec les désignations des capteurs et des préactionneurs de ce
système :
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
36 / 65
Capteurs Mnémonique Préactionneurs Mnémonique
des capteurs des préactionneurs
2) Elaborer le grafcet niveau 2 ;
3) Affecter les entrées et les sorties aux adresses de l’automate utilisé ;
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
4) Elaborer le programme sur papier et le saisir sur le PC (remettre avec la feuille d’examen)
5) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme ;
6) Vérifier le fonctionnement du programme en présence de l’examinateur ;
7) Vérifier le bon fonctionnement en présence du formateur.
Des colis arrivent sur les tapis 1 et 2 à intervalles irréguliers.
Si un colis arrive à l’extrémité du tapis 1, celui-ci s’arrête ; de même pour le tapis 2.
Si un poste de traitement (A ou B) est libre, le tapis 3 se positionne devant le tapis (1 ou 2) sur
lequel se trouve un colis en attente.
Ce dernier ainsi que le tapis 3 se mettent en route jusqu’à ce que le colis soit positionné sur le
tapis 3, puis le tapis 3 se positionne devant le poste de traitement libre et évacue le colis sur le
tapis (4 ou 5).
Le poste est occupé dès qu’un colis se trouve sur le tapis correspondant.
Le Grafcet ne prendra pas en compte l’arrêt automatique des tapis 1 et 2 lorsqu’un colis arrive
à leur extrémité.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
37 / 65
Travail demandé :
1) Remplir le tableau
suivant avec les
désignations des capteurs
et des
préactionneurs de ce système :
Capteurs Mnémonique Préactionneurs Mnémonique
des capteurs des préactionneurs
2) Elaborer le grafcet niveau 2;
3) Affecter les entrées et les sorties aux adresses de l’automate utilisé ;
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
4) Elaborer le programme sur papier et le saisir sur le PC (remettre avec la feuille d’examen)
5) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme ;
6) Vérifier le fonctionnement du programme en présence de l’examinateur ;
7) Vérifier le bon fonctionnement en présence du formateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
38 / 65
Deux wagonnets alimentent le skip de déchargement d'un haut-fourneau en empruntant une
voie commune selon le schéma suivant :
Fonctionnement :
Le cycle correspondant à un chariot est le suivant :
• dès que l'opérateur donne l'ordre de « départ cycle » (Dcy), le wagonnet considéré effectue
automatiquement son chargement et démarre au signal fin de chargement (Fc).
• Le wagonnet se dirige ensuite vers la partie commune où il s'arrête à une position d'attente si
la voie commune est occupée, sinon il faut positionner l'aiguillage sur la position correcte et le
chariot continue.
• Arrivé à la position de déchargement automatique, il attend le temps nécessaire avant de
retourner à la position initiale (attente 5s).
Travail demandé :
1) Remplir le tableau suivant avec les désignations des capteurs et des préactionneurs de ce
système :
Capteurs Mnémonique Préactionneurs Mnémonique
des capteurs des préactionneurs
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
39 / 65
2) Elaborer le grafcet ;
3) Affecter les entrées et les sorties aux adresses de l’automate utilisé ;
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
4) Elaborer le programme sur papier et le saisir sur le PC (remettre avec la feuille d’examen)
5) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme ;
6) Vérifier le fonctionnement du programme en présence de l’examinateur ;
7) Vérifier le bon fonctionnement en présence du formateur.
Une presse à emboutir est alimentée par un dispositif formé par un tapis supérieur amenant les
pièces dans un retourneur qui les retourne sur un tapis inférieur. Ce dernier élève les pièces
jusqu'au niveau de la presse grâce à un ascenseur.
Après emboutissage une pince prend la pièce, préalablement surélevée par l'éjecteur, pour la
déposer sur le tapis d'évacuation
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
40 / 65
Travail demandé :
1) Remplir le tableau suivant avec les désignations des capteurs et des préactionneurs de ce
système :
Capteurs Mnémonique Préactionneurs Mnémonique
des capteurs des préactionneurs
2) Elaborer le grafcet ;
3) Affecter les entrées et les sorties aux adresses de l’automate utilisé ;
Mnémonique Adresse de Mnémonique Adresse de la sortie
des capteurs l’entrée des automate
automate actionneurs
4) Elaborer le programme sur papier et le saisir sur le PC (remettre avec la feuille d’examen)
5) Configurer l’automate en utilisant le logiciel de programmation disponible à l’atelier et
transférer le programme ;
6) Vérifier le fonctionnement du programme en présence de l’examinateur ;
7) Vérifier le bon fonctionnement en présence du formateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
41 / 65
Station de lavage
Dcy Démarrer le cycle du lavage H Contacteur qui commande les
deux lampes LV et LR
ATU Arrêt d’urgence, il arrête le LV Lampe verte, allumée quand H
cycle à n’importe quel moment est désexcitée
Reset Réinitialiser le système après LR Lampe rouge, allumée quand H
un arrêt d’urgence (activer les est excitée
étapes initiales
L1 Capteur de présence de la LAV Electrovanne qui injecte la
voiture à la position 1 mousse de lavage
L2 Capteur de présence de la RB Moteur qui entraine la rotation
voiture à la position 2 de la brosse de lavage
L3 Capteur de présence de la SECHE Moteur qui entraine la pompe de
voiture à la position 3 séchage
L4 Capteur de présence de la RINCE Electrovanne qui injecte l’eau de
voiture à la position 4 rinçage
Ind Capteur de la présence d’une TRANSP Le moteur qui entraine le tapis
voiture à l’entrée de la station roulant : pour transporter le
de lavage véhicule le long de la station de
lavage
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
42 / 65
Fonctionnement :
Initialement la lampe verte est allumée
Une voiture se présente à l’entrée de la station de lavage (Ind=1), l’appui sur le bouton Dcy
provoque le cycle suivant :
➢ Le tapis démarre pour transporter la voiture et la lampe rouge s’allume pour indiquer
que la station est occupée
➢ Lorsqu’on atteint la position 1 (L1=1) on injecte la mousse de lavage et on démarre la
brosse rotative (LAV et RB)
➢ Lorsqu’on atteint la position 2 (L2=1) on arrête l’injection et la brosse et on démarre le
rinçage (RINCE)
➢ Lorsqu’on atteint la position 3 (L3=1) on arrête le rinçage et on démarre le séchage
➢ Lorsqu’on atteint la position 4 (L4=1) on arrête le rinçage
➢ Le tapis continu à marcher jusqu’à ce que la voiture quitte la position 4 (L4=0)
➢ Le système retourne à son état initial et la lampe verte s’allume à nouveau
Remarques :
➢ La lampe rouge est allumée pendant tout le processus
➢ Le tapis est en marche pendant tout le processus
➢ Il faut prendre en considération la gestion de l’arrêt d’urgence
Travail demandé :
1) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique des Adresse de l’entrée Mnémonique des Adresse de la sortie
capteurs de l’API actionneurs de l’API
2) Elaborer le grafcet niveau 2.
3) Configurer l’automate et éditer le programme.
4) Enregistrer le programme dans un dossier spécifié.
5) Transférer le programme.
6) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
43 / 65
Station de lavage
Q1 Le moteur qui entraine la rotation du convoyeur
Q2 L’électrovanne pour injecter la mousse de prélavage
Q3 Le moteur qui entraine la brosse rotative
Q4 L’électrovanne pour injecter la mousse de lavage
Q5 L’électrovanne de lavage de dessous
Q6 L’électrovanne de l’eau de rinçage
Q7 L’électrovanne pour injecter la cire chaude
Q8 Le moteur qui entraine la pompe de séchage
H La lampe qui indique que le lavage est terminé
P1 La lampe P1 est allumée pendant tout le processus du lavage
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
44 / 65
Fonctionnement :
Au départ :
-la lampe H est allumée
-le conducteur met la voiture dans la position 1 (le capteur B1)
-le conducteur choisi les options supplémentaires (le lavage de dessous et la cire chaude)
L’appui sur le bouton S1 (départ de cycle) déclenche le cycle suivant :
-La lampe P1 s’allume et la lampe H s’éteint, la vanne de la mousse de prélavage s’ouvre et le
convoyeur transporte la voiture à une petite vitesse
-lorsque la position 2 est atteinte (capteur B2) :
➢ On ouvre la vanne de la mousse de lavage
➢ On démarre la brosse rotative
➢ On démarre le lavage de dessous (s’il est demandé par le bouton S2)
-lorsque la position 3 est atteinte (capteur B3) :
➢ On ferme la vanne de la mousse de prélavage
➢ On ouvre l’eau de rinçage
➢ On maintient la vanne de la mousse de lavage, la brosse rotative et le lavage de
dessous
-lorsque la position 4 est atteinte (capteur B4) :
➢ On arrête la vanne de la mousse de lavage, la brosse rotative et le lavage de dessous
➢ On ouvre la vanne de la cire chaude (s’elle est demandé par le bouton S3)
➢ On maintient le rinçage
-lorsque la position 5 est atteinte (capteur B5) :
➢ On arrête le rinçage.
➢ On démarre le séchage
➢ On maintient l’injection de la cire chaude
-lorsque la position 6 est atteinte (capteur B6) :
➢ On arrête l’injection de la cire chaude et le convoyeur
➢ On maintient le séchage pendant 10 secondes supplémentaire.
-après ces 10 secondes on éteint la lampe P1 et on allume la lampe H pour indiquer que le
cycle est terminé, le conducteur peut donc conduit sa voiture et un nouveau cycle peut se
reproduire.
Remarque :
• Les capteurs B7 à B11 ne sont pas traités
• Le convoyeur est en mouvement pendant tout le cycle
Travail demandé :
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
45 / 65
1) Affecter les entrées et les sorties aux adresses de l’automate utilisé selon le tableau
suivant :
Mnémonique des Adresse de l’entrée Mnémonique des Adresse de la sortie
capteurs de l’API actionneurs de l’API
2) Elaborer le grafcet niveau 2.
3) Configurer l’automate et éditer le programme.
4) Enregistrer le programme dans un dossier spécifié.
5) Transférer le programme.
6) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
46 / 65
Le fonctionnement du procédé est expliqué dans le chronogramme de fonctionnement
Remarques :
➢ Le démarrage de cycle est lancé par l’appui sur le bouton Start.
➢ Il faut prévoir des fins de courses pour tous les vérins
➢ Le vérin A a une commande bistable et les autres vérins (B, C et D) ont une commande
monostable.
➢ La lampe H s’allume pendant tout le processus de découpage.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
47 / 65
Travail demandé :
1) Affecter les entrées et les sorties aux adresses de l’automate utilisé selon le tableau
suivant :
Mnémoniqu Description Adresse de Mnémoniqu Description Adresse de
e des l’entrée de e des la sortie de
capteurs l’API actionneurs l’API
2) Elaborer le grafcet niveau 2.
3) Configurer l’automate et éditer le programme.
4) Enregistrer le programme dans un dossier spécifié.
5) Transférer le programme.
6) Vérifier le fonctionnement du programme en présence de l’examinateur.
Pliage des tôles :
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
48 / 65
Les entrées de système :
Dcy Départ de cycle S2 La grille de protection est
ouverte
S1 Détecter une tôle S3 La grille de protection est
fermée
1B1 Capteur de proximité du 1B2 Capteur de proximité du
vérin de serrage vérin de serrage
2B1 Capteur de proximité du 2B2 Capteur de proximité du
vérin de pliage vérin de pliage
3B1 Capteur de proximité du 3B2 Capteur de proximité du
vérin à arrondir vérin à arrondir
Les sorties de système :
LO Lampe orange de signalisation
Q1 Fermer la grille de protection
Q2 Ouvrir la grille de protection
1M1 Serrer la tôle
1M2 Desserrer la tôle
2M1 Plier la tôle
3M1 Arrondir la tôle
Fonctionnement :
Au départ : La grille de protection est ouverte et les vérins sont tous reculés
Description du cycle :
➢ On met une tôle sur la table de pliage (S1) et on appui sur le bouton Dcy
➢ La grille de protection se ferme (S3) et la lampe orange commence à clignoter
(fréquence 1Hz)
➢ On serre la tôle
➢ Le vérin de pliage descend pour plier la tôle puis il remonte
➢ Le vérin à arrondir sort pour arrondir la tôle puis il recule
➢ On desserre la tôle
➢ On ouvre la grille de protection
➢ La lampe orange s’éteint, la tôle peut donc être dégagée
➢ Revenir à l’étape initiale après dégagement de la tôle
Travail demandé :
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
49 / 65
1) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique des Adresse de l’entrée Mnémonique des Adresse de la sortie
capteurs de l’API actionneurs de l’API
2) Elaborer le grafcet niveau 2.
3) Configurer l’automate et éditer le programme.
4) Enregistrer le programme dans un dossier spécifié.
5) Transférer le programme.
6) Vérifier le fonctionnement du programme en présence de l’examinateur.
fa Capteur barrière en haut LR Lampe rouge
fc Capteur barrière en bas LV Lampe verte
fr Capteur électromagnétique des A Lever la barrière
voitures autorisées à utiliser le
parking
fe Détecter la présence d’une C Descendre la barrière
voiture à l’entrée du parking
fu Capteur : il détecte qu’une ALARM Déclencher l’alarme
voiture a traversé la barrière
p Bouton poussoir d’acquittement
de l’alarme
Fonctionnement :
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
50 / 65
Initialement :
• La lampe rouge est allumée
• La lampe verte est éteinte
• La barrière est en bas
Le cycle démarre lorsque le capteur « fe » détecte une voiture :
➢ Si la voiture est autorisée à accéder au parking le capteur « fr » est mise à 1, dans ce
cas :
• La lampe rouge s’éteint et la lampe verte s’allume et la barrière se lève
• La barrière reste levée jusqu’à la rentrée de la voiture (détectée par un front
descendant de « fu »)
• La barrière descend
• La lampe verte s’éteint et la lampe rouge s’allume à nouveau
• Un nouveau cycle peut donc recommencer
➢ Si la voiture n’est pas autorisée à accéder au parking (« fr » à 0):
• Les deux lampes rouge et verte s’allument et l’alarme se déclenche
• Dans ce cas un agent de sécurité se présente pour identifier la voiture puis il
appui sur le bouton « p » pour lever la barrière et arrêter l’alarme
• La barrière reste levée jusqu’à la rentrée de la voiture (détectée par un front
descendant de « fu »)
• La barrière descend
• La lampe verte s’éteint et la lampe rouge reste allumée
• Un nouveau cycle peut donc recommencer
Travail demandé :
1) Affecter les entrées et les sorties aux adresses de l’automate utilisé selon le tableau
suivant :
Mnémonique des Adresse de l’entrée Mnémonique des Adresse de la sortie
capteurs de l’API actionneurs de l’API
2) Elaborer le grafcet niveau 2.
3) Configurer l’automate et éditer le programme.
4) Enregistrer le programme dans un dossier spécifié.
5) Transférer le programme.
6) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
51 / 65
Parking des voitures et des motocycles :
a Capteur de la voie A BGH Lever la barrière gauche
b Capteur de la voie B BGB Baisser la barrière gauche
d0 Capteur barrière droite en bas BDH Lever la barrière droite
d1 Capteur barrière droite en haut BDB Baisser la barrière droite
g0 Capteur barrière gauche en bas
g1 Capteur barrière gauche en haut
f Capteur de passage d’une voiture ou
motocycle (normalement fermé)
m1 Capteur des pièces d’un dirham
m2 Capteur des pièces de 2 dirhams
Une voiture est détectée par les deux capteurs « a » et « b »
Un motocycle est détecté par le capteur « a » seulement
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
52 / 65
Le prix du parking pour une voiture est 2 dirhams
Le prix du parking pour un motocycle est 1 dirham
Fonctionnement :
Si une voiture se présente :
➢ Les deux capteurs a et b sont excités
➢ Le conducteur doit mettre une pièce de 2DH dans m2 ou deux pièces de 1DH dans m1
➢ Les deux barrières se lèvent
➢ Après le passage de la voiture (capteur « f ») les barrières descendent
Si un motocycle se présente :
➢ Le capteur « a » s’excite
➢ Le motard doit mettre une pèce de 1DH dans m1
➢ La barrière gauche se lève
➢ Après le passage du motocycle (capteur « f ») la barrière gauche descend
Travail demandé :
1) Affecter les entrées et les sorties aux adresses de l’automate utilisé selon le tableau
suivant :
Mnémonique des Adresse de l’entrée Mnémonique des Adresse de la sortie
capteurs de l’API actionneurs de l’API
2) Elaborer le grafcet niveau 2.
3) Configurer l’automate et éditer le programme.
4) Enregistrer le programme dans un dossier spécifié.
5) Transférer le programme.
6) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
53 / 65
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
54 / 65
Le fonctionnement du procédé est expliqué dans le chronogramme de fonctionnement
Remarques :
➢ Le démarrage de cycle est lancé par l’appui sur le bouton Start.
➢ Il faut prévoir des fins de courses pour les trois vérins.
➢ Le vérin 1A1 a une commande bistable et les autres vérins (2A1 ;3A1) ont une
commande monostable.
➢ Le temps de démarrage et de l’arrêt du moteur de la perceuse est 2 secondes.
➢ Le panier d’évacuation ne peut contenir que 10 pièces usinées, après l’usinage de 10
pièces la lampe H est allumée, dans ce cas l’opérateur doit vider le panier et appuyer sur
le bouton Reset pour revenir à l’état initiale.
Travail demandé :
1) Affecter les entrées et les sorties aux adresses de l’automate utilisé selon le tableau
suivant :
Mnémoniqu Description Adresse de Mnémoniqu Description Adresse de
e des l’entrée de e des la sortie de
capteurs l’API actionneurs l’API
2) Elaborer le grafcet niveau 2.
3) Configurer l’automate et éditer le programme.
4) Enregistrer le programme dans un dossier spécifié.
5) Transférer le programme.
6) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
55 / 65
Station d’estampage
Les entrées de système :
START Démarrer un cycle 1B2 Le vérin de l’injection des
pièces (1A) est en avant
2B1 Le vérin d’estampage (2A)
est en arrière
RESET Réinitialiser le cycle 2B2 Le vérin d’estampage (2A)
(revenir à l’étape initiale) est en avant
Co Capteur optique, il détecte 3B1 Le vérin de dégagement (3A)
le passage d’une pièce au est en arrière
panier
1B1 Le vérin de l’injection des 3B2 Le vérin de dégagement (3A)
pièces (1A) est en arrière est en avant
Les sorties de système :
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
56 / 65
PLEIN Une lampe de signalisation : elle indique que le panier est plein
1M1 Distributeur monostable qui commande le vérin de l’injection
des pièces (1A)
2M1 Distributeur monostable qui commande le vérin d’estampage
(2A)
3M1 Distributeur monostable qui commande le vérin de dégagement
des pièce (3A)
4M1 Distributeur monostable qui commande la soufflette de l’air
comprimé
Fonctionnement :
Après l’appui sur le bouton START, le cycle suivant se déclenche :
➢ Le vérin d’injection des pièces injecte une pièce dans la position
d’estampage puis il recule.
➢ Le vérin d’estampage descend pour estamper la pièce puis il monte.
➢ Le vérin de dégagement sort et la soufflette souffle la pièce vers le panier.
➢ Quand la pièce passe au panier on arrête la soufflette et on remet le vérin
de dégagement en arrière.
➢ Après le passage de 30 pièces le panier est plein, la lampe « PLEIN »
s’allume, l’opérateur dans ce cas dois vider le panier et réinitialise le cycle
en appuyant sur le bouton « RESET »
Remarques :
➢ On peut utiliser 3 pièces au lieu de 30 pièces lors de la simulation
Travail demandé :
1) Affecter les entrées et les sorties aux adresses de l’automate utilisé selon le tableau
suivant :
Mnémonique des Adresse de l’entrée Mnémonique des Adresse de la sortie
capteurs de l’API actionneurs de l’API
2) Elaborer le grafcet niveau 2.
3) Configurer l’automate et éditer le programme.
4) Enregistrer le programme dans un dossier spécifié.
5) Transférer le programme.
6) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
57 / 65
Machine à café
S0 Démarrer le processus V1 Electrovanne de l’eau froide
b1 Capteur : filtre plein V2 Electrovanne de l’eau chauffée à
90°
b2 Capteur : niveau bas de la P Pompe d’injection de l’eau chauffée
chaudière dans le filtre
b3 Capteur de température : ML Moulin de broyage du café
température de 90° atteinte
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
58 / 65
b4 Capteur : niveau haut de la RC Résistance de chauffage de l’eau
chaudière
L Lampe, elle allumée pendant tout le
processus
Fonctionnement :
L’usager met une tasse et appui sur le bouton poussoir S0.
Les actions suivantes démarrent simultanément :
➢ L’électrovanne de l’eau s’ouvre (V1), et le chauffage de l’eau commence
(RC), on attend le remplissage de la chaudière (b4=1) et on ferme
l’électrovanne V1, le chauffage continu jusqu’à une température de 90°
(b3=1).
➢ Le moulin à café démarre pour broyer et remplir le filtre jusqu’à le niveau
haut (b1=1).
➢ La lampe L s’allume pendant tout le processus.
On ouvre l’électrovanne V2 et on démarre la pompe d’injection (P) jusqu’à la
vidange de la chaudière
La lampe L s’éteint et l’usager peut prendre son café.
Travail demandé :
1) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique des Adresse de l’entrée Mnémonique des Adresse de la sortie
capteurs de l’API actionneurs de l’API
2) Elaborer le grafcet niveau 2.
3) Configurer l’automate et éditer le programme.
4) Enregistrer le programme dans un dossier spécifié.
5) Transférer le programme.
6) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
59 / 65
Station d’estampage
Les entrées de système :
START Démarrer un cycle 1B2 Le vérin de l’injection des pièces
(1A) est en avant
Pa Capteur analogique de 2B1 Le vérin d’estampage (2A) est en
pression arrière
Co Capteur optique, il détecte le 3B1 Le vérin de dégagement (3A) est
passage d’une pièce au panier en arrière
1B1 Le vérin de l’injection des 3B2 Le vérin de dégagement (3A) est
pièces (1A) est en arrière en avant
Les sorties de système :
1M1 Distributeur monostable qui commande le vérin de l’injection des pièces
(1A)
2M1 Distributeur monostable qui commande le vérin d’estampage (2A)
3M1 Distributeur monostable qui commande le vérin de dégagement des pièce
(3A)
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
60 / 65
4M1 Distributeur monostable qui commande la soufflette de l’air comprimé
Propriétés du capteur de pression Pa :
-il délivre une tension de 0 à 10Volts
-la valeur maximale : 12bar
-la valeur minimale : 0bar
-il est branché à l’entrée analogique IW0 (ou EW0)
Fonctionnement :
Après l’appui sur le bouton START, le cycle suivant se déclenche :
➢ Le vérin d’injection des pièces injecte une pièce dans la position d’estampage puis il
recule.
➢ Le vérin d’estampage descend pour estamper la pièce.
➢ Quand la pression désirée dans le vérin d’estampage est atteinte le vérin remonte
➢ Le vérin de dégagement sort et la soufflette souffle la pièce vers le panier.
➢ Quand la pièce passe au panier on arrête la soufflette et on remet le vérin de
dégagement en arrière.
Remarques :
➢ La pression d’estampage est 8bar
➢ Une mise à l’échelle du capteur analogique de pression est à prévoir
Travail demandé :
1) Affecter les entrées et les sorties aux adresses de l’automate utilisé selon le tableau
suivant :
Mnémonique des Adresse de l’entrée Mnémonique des Adresse de la sortie
capteurs de l’API actionneurs de l’API
2) Elaborer le grafcet niveau 2.
3) Configurer l’automate
4) Mettre à l’échelle le capteur analogique
5) Editer le programme.
6) Enregistrer le programme dans un dossier spécifié.
7) Transférer le programme.
8) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
61 / 65
Unité de malaxage
WG Capteur analogique de poids, VA L’électrovanne du produit A
associé à une entrée VB L’électrovanne du produit B
analogique IW0
VX L’électrovanne de l’adjuvant
X
Sh Capteur malaxeur vertical VC L’électrovanne de l’unité de
pesage
Sb Capteur malaxeur incliné MR Moteur du malaxeur
Dcy Bouton poussoir de départ de MDH Monter le malaxeur à la
cycle position verticale
MDB Incliner le malaxeur pour
vidange de produit
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
62 / 65
Propriétés du capteur du poids WG :
-il délivre une tension de 0 à 10Volts
-la valeur maximale : 1000Kg
-la valeur minimale : 0Kg
-il est branché à l’entrée analogique IW0 (ou EW0)
Fonctionnement :
L’appui sur le bouton Dcy déclenche le cycle suivant :
➢ On met 300Kg de produit A dans l’unité de pesage
➢ On ajoute 200Kg de produit B
➢ On ajout 50Kg de l’adjuvant X
➢ On vide l’unité de pesage à travers l’électrovanne VC et on démarre le
malaxeur simultanément.
➢ Après la vidange de l’unité de pesage, on continu à malaxer 10 secondes
de plus
➢ On incline le malaxeur pour le vidanger tout en maintenant le malaxage.
➢ On arrête le malaxeur et on le remet à son état vertical, le cycle s’achève.
Travail demandé :
1) Affecter les entrées et les sorties aux adresses de l’automate utilisé selon le tableau
suivant :
Mnémonique des Adresse de l’entrée Mnémonique des Adresse de la sortie
capteurs de l’API actionneurs de l’API
2) Elaborer le grafcet niveau 2.
3) Configurer l’automate
4) Mettre à l’échelle le capteur analogique
5) Editer le programme.
6) Enregistrer le programme dans un dossier spécifié.
7) Transférer le programme.
8) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
63 / 65
DCy Départ du cycle VA L’électrovanne du produit A
S0 Malaxeur vertical VB L’électrovanne du produit B
S1 Malaxeur incliné VC L’électrovanne du produit C
z Bascule vide MR Le moteur du malaxeur
a Capteur : Poids « a » atteint MPB Moteur du pivotement du
malaxeur vers le bas
b Capteur : Poids « b » atteint MPH Moteur du pivotement du
malaxeur vers le haut
DP Détecteur de passage des MT Moteur du tapis d’aménagement
briquettes
Fonctionnement :
Initialement :
-le malaxeur est vertical (S0=1)
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
64 / 65
-la bascule est vide (z=1)
L’appui sur le bouton poussoir Dcy provoque le cycle suivant :
➢ On remplit la bascule par le produit A jusqu’à avoir la quantité « a »
➢ On ferme l’électrovanne du produit A et on ouvre celle du produit B
jusqu’à avoir la quantité « b »
➢ On verse le contenu de la bascule dans le malaxeur et on démarre le
malaxeur simultanément jusqu’à la vidange de la bascule
➢ On maintient toujours le malaxage et on ajoute 6 briquettes dans le
malaxeur
➢ Après l’ajout des briquettes on continu à malaxer le mélange 10 secondes
de plus
➢ On verse le produit final en utilisant le moteur de pivotement du malaxeur
(et on maintient toujours le malaxage)
➢ Le malaxeur reste en bas pendant 8 secondes (et on maintient toujours le
malaxage)
➢ On arrête le malaxage et on remet le malaxeur dans son état vertical
Travail demandé :
1) Affecter les entrées et les sorties aux adresses de l’automate utilisé :
Mnémonique des Adresse de l’entrée Mnémonique des Adresse de la sortie
capteurs de l’API actionneurs de l’API
2) Elaborer le grafcet niveau 2.
3) Configurer l’automate et éditer le programme.
4) Enregistrer le programme dans un dossier spécifié.
5) Transférer le programme.
6) Vérifier le fonctionnement du programme en présence de l’examinateur.
Filière : Mécatronique 1ère année (2018/2019) CFMNTIOE Oujda
65 / 65
Vous aimerez peut-être aussi
- TD Grafcet Yaourt TachesDocument6 pagesTD Grafcet Yaourt TachesKacimi Soufyane33% (3)
- Série 2 Automatisme Avec CorrigéDocument11 pagesSérie 2 Automatisme Avec Corrigéamine milano100% (3)
- TD Supervision CorrigéDocument10 pagesTD Supervision CorrigéSana GassémPas encore d'évaluation
- TD Api05022019Document10 pagesTD Api05022019Mohamed FathallahPas encore d'évaluation
- ChariotsDocument2 pagesChariotskhalid elmarzakPas encore d'évaluation
- Examen 2019-2020Document16 pagesExamen 2019-2020AYMAN COUKIPas encore d'évaluation
- Cahier Des ChargesDocument14 pagesCahier Des ChargesRadouan Sahb100% (2)
- Eps Ii 1Document12 pagesEps Ii 1Albertø Là Vïtëssë100% (1)
- TD N2 LadderDocument3 pagesTD N2 Ladderghassen Ben hlima100% (1)
- Examen-Corr GrafcetDocument4 pagesExamen-Corr GrafcetFatimazahrae AB100% (3)
- Le Grafcet Exercices CorrigesDocument2 pagesLe Grafcet Exercices CorrigesAmir Na Dz100% (3)
- Cours 12 Exemples Grafcet Et GEMMADocument7 pagesCours 12 Exemples Grafcet Et GEMMAimen mehri100% (3)
- TD GrafcetDocument2 pagesTD GrafcetLarbi Badrour100% (4)
- TD 2Document1 pageTD 2Ghlissi Nejib0% (1)
- Exercice 1 Grafcet-Api PDFDocument3 pagesExercice 1 Grafcet-Api PDFYassine Hnada67% (3)
- G7-Ex6 Machine-Rainur PDFDocument6 pagesG7-Ex6 Machine-Rainur PDFKhaled OuniPas encore d'évaluation
- Mini ProjetDocument3 pagesMini ProjetFakhreddine Okail67% (3)
- API Examen 2013Document2 pagesAPI Examen 2013Hichem Hamdi50% (2)
- Exercice Corrigé Grafcet Unité - Perçage - AutoDocument2 pagesExercice Corrigé Grafcet Unité - Perçage - AutoAhmed BidAr100% (4)
- Présentation Memoire KoffiDocument14 pagesPrésentation Memoire KoffiBenie DE DieuPas encore d'évaluation
- Equipements Hydrauliques Et PneumatiquesDocument198 pagesEquipements Hydrauliques Et PneumatiquesMarc Lambert75% (8)
- Exam2018 - Contrôle 1 API 2Document4 pagesExam2018 - Contrôle 1 API 2adam100% (1)
- 03 Chapitre 1Document5 pages03 Chapitre 1Firas FirasPas encore d'évaluation
- TD1 Automatisme - GRAFCETDocument11 pagesTD1 Automatisme - GRAFCETFadila FE100% (2)
- ESA - TP FFs - Juin'10 PDFDocument122 pagesESA - TP FFs - Juin'10 PDFmustapha boughariounPas encore d'évaluation
- Examen API&SupervisionDocument4 pagesExamen API&SupervisionSoufien Atoui67% (3)
- Graf Cet Exercice SDocument15 pagesGraf Cet Exercice SHichem Hamdi50% (2)
- Exercices de GrafcetDocument3 pagesExercices de Grafcetsalimiyouness0% (1)
- Grafcet Avex Correction - 1Document34 pagesGrafcet Avex Correction - 1Fettah Guarnaoui100% (3)
- EXERCICE #1: Malaxeur AgroalimentaireDocument5 pagesEXERCICE #1: Malaxeur Agroalimentairehamdi jihen100% (2)
- Exercices Grafcet - RevisionDocument17 pagesExercices Grafcet - RevisionMohamed LarbiPas encore d'évaluation
- Exams Corr GInd FinalDocument26 pagesExams Corr GInd Finaljohn mikePas encore d'évaluation
- EXAMENAutomatismeDocument1 pageEXAMENAutomatismegringo yeso100% (1)
- Département Génie Electrique: I S É R TDocument4 pagesDépartement Génie Electrique: I S É R THend ChammamPas encore d'évaluation
- GE-T.LANTRI-Automates Programmables Industriels (API) - TP5 - API - L3 - AUTO-L3-S6Document2 pagesGE-T.LANTRI-Automates Programmables Industriels (API) - TP5 - API - L3 - AUTO-L3-S6Rabah Amidi100% (1)
- Grafcet Exercice n3 4Document4 pagesGrafcet Exercice n3 4khocine100% (2)
- 1 Programmation LADDERDocument6 pages1 Programmation LADDERYoussef100% (2)
- Commande D'un Escenseur Step7-200Document20 pagesCommande D'un Escenseur Step7-200KadriAbderRaouf100% (1)
- 05 - Exercices GRafcetDocument4 pages05 - Exercices GRafcetBorhèn Oussai79% (19)
- Grafcet Et Point de VueDocument4 pagesGrafcet Et Point de VueLTIMK100% (1)
- Exos GrafcetDocument26 pagesExos GrafcetRuben Yav100% (2)
- TD1 Grafcet 2023 2024Document12 pagesTD1 Grafcet 2023 2024naimibtissam01Pas encore d'évaluation
- Exo GrafcetDocument3 pagesExo GrafcetSkimoghjPas encore d'évaluation
- Cahier de ChargeDocument8 pagesCahier de ChargeAbdesslam jPas encore d'évaluation
- Grafcet Elt 3 PDFDocument7 pagesGrafcet Elt 3 PDFnawzat100% (9)
- LadderDocument1 pageLadderMounir Hadrich0% (1)
- Exo G7Document1 pageExo G7Elmokh LassaadPas encore d'évaluation
- Ds Automatisme JuinDocument3 pagesDs Automatisme JuinAmira Warhéni100% (1)
- Exercice 1 Grafcet-ApiDocument3 pagesExercice 1 Grafcet-ApiMouhcine Zianee100% (2)
- Exercices 3-4 ChariotDocument4 pagesExercices 3-4 Chariotyaccine100% (9)
- Etude DDocument3 pagesEtude DElmokh Lassaad50% (4)
- Corrigé EFF AII Synthése V1 2023Document14 pagesCorrigé EFF AII Synthése V1 2023mbarek liass0% (1)
- Grafcet 5Document2 pagesGrafcet 5Tarek MehdidPas encore d'évaluation
- TD PneumatiqueDocument12 pagesTD PneumatiqueOussama EljaafariPas encore d'évaluation
- TD2 Sur Chapitre 2. Le GrafcetDocument7 pagesTD2 Sur Chapitre 2. Le GrafcetMa Jhoul0% (1)
- TD Grafcet Série3 PDFDocument15 pagesTD Grafcet Série3 PDFSeekn Dstroy100% (1)
- TP Circuits Pneumatiques GDA SIM CORRECTIONDocument8 pagesTP Circuits Pneumatiques GDA SIM CORRECTIONNoOr HanePas encore d'évaluation
- Td1 API Grafcet Geet19Document7 pagesTd1 API Grafcet Geet19dansokomahaPas encore d'évaluation
- ESA - TP FFs - Juin'10Document122 pagesESA - TP FFs - Juin'10mustapha bougharioun100% (1)
- Exercices GrafcetDocument5 pagesExercices GrafcetHamza AbourifaaPas encore d'évaluation
- Poly TD API PDFDocument10 pagesPoly TD API PDFKhadija HajadePas encore d'évaluation
- Rattrapage Cpi1 Iia 2soir Et JourDocument4 pagesRattrapage Cpi1 Iia 2soir Et Jourbertrand Nathan ayenePas encore d'évaluation
- Série D'oxydoreduction 1er Bac SC BiofDocument2 pagesSérie D'oxydoreduction 1er Bac SC Biofbenmaleksamir84Pas encore d'évaluation
- 5 ProportionnalitéDocument3 pages5 ProportionnalitéKilgravePas encore d'évaluation
- 6 ELN Electronique Des Systèmes Embarqués - 11septDocument77 pages6 ELN Electronique Des Systèmes Embarqués - 11septDOUNIAPas encore d'évaluation
- Norsk Grammatik 1Document3 pagesNorsk Grammatik 1Roxy KPas encore d'évaluation
- Exo Corrigés MatériauDocument11 pagesExo Corrigés MatériauAristide DOSSOUPas encore d'évaluation
- Dual Boot 7 Et XP Avec XP Apres 7 by ILyASDocument10 pagesDual Boot 7 Et XP Avec XP Apres 7 by ILyASEl Mehdi ElGeutraniPas encore d'évaluation
- Activité 1.1 Rappels Séismes Énoncé Correction BilanDocument2 pagesActivité 1.1 Rappels Séismes Énoncé Correction BilansafiredaPas encore d'évaluation
- PDF LogicseqDocument25 pagesPDF LogicseqYassine FalahPas encore d'évaluation
- Chapitre Iv Proprietes Des Semi-Groupes de Contractions Non LineairesDocument24 pagesChapitre Iv Proprietes Des Semi-Groupes de Contractions Non LineairesHam Karim RUPPPas encore d'évaluation
- En 1714Document36 pagesEn 1714Youcef ChorfaPas encore d'évaluation
- Note de Calcul Dimensionnement M Canique D Un Conduite 1709530151Document7 pagesNote de Calcul Dimensionnement M Canique D Un Conduite 1709530151I'hsen ElmayPas encore d'évaluation
- NivellementDocument8 pagesNivellementAnonymous LNStoL34Pas encore d'évaluation
- Série D'exercices N°1 - Math Fonctions Exponentielles - Bac Math (2014-2015) MR Dhaouadi AmeurDocument2 pagesSérie D'exercices N°1 - Math Fonctions Exponentielles - Bac Math (2014-2015) MR Dhaouadi AmeurMohamed Amine NajmiPas encore d'évaluation
- ForcesDocument31 pagesForcesmjmjiPas encore d'évaluation
- Débitmètre E+HDocument28 pagesDébitmètre E+HRabii El HadratiPas encore d'évaluation
- Racines Polynome 2nd Degre 1 Corrige PDFDocument3 pagesRacines Polynome 2nd Degre 1 Corrige PDFAlltube teamPas encore d'évaluation
- Probabilité Au BAC S2 de 1989 À 2022Document11 pagesProbabilité Au BAC S2 de 1989 À 2022mactardiop2002100% (1)
- Université Abbess Laghrour Khenchela: Cours de Bases de Données AvancéesDocument100 pagesUniversité Abbess Laghrour Khenchela: Cours de Bases de Données AvancéesINTTIC100% (1)
- Javascript Et CSS Esp8266Document8 pagesJavascript Et CSS Esp8266Miloud BELHAMRIPas encore d'évaluation
- La Phrase ComplexeDocument7 pagesLa Phrase ComplexeⴰⵖⵡⴰⵖPas encore d'évaluation
- Examen de Fin de FormationDocument6 pagesExamen de Fin de FormationHicham ZMPas encore d'évaluation
- Chapitre I Cycle de Puissance À Une Seule Phase (Recovered) PDFDocument8 pagesChapitre I Cycle de Puissance À Une Seule Phase (Recovered) PDFHamza Bouabdallah100% (4)
- Fabrication AdditiveDocument8 pagesFabrication Additivenizarbu29Pas encore d'évaluation
- TP N°2 de Mecanique Physique 1 S1 2023-2024Document2 pagesTP N°2 de Mecanique Physique 1 S1 2023-2024Fatima Zohra BeldjennaPas encore d'évaluation
- 1-Generalites RX KaraDocument61 pages1-Generalites RX KaraLolo KawtchiPas encore d'évaluation
- Alimentation PC À Partir de 12vDocument11 pagesAlimentation PC À Partir de 12vKarl Franck Christel Youdi-nediPas encore d'évaluation
- Abarrier L208Document4 pagesAbarrier L208mojahid mojaPas encore d'évaluation
- M Ea Int JMF 05Document4 pagesM Ea Int JMF 05frederic sateraPas encore d'évaluation