Vous aimerez peut-être aussi
- Le syndrome périodique associé à la cryopyrine (CAPS)D'EverandLe syndrome périodique associé à la cryopyrine (CAPS)Pas encore d'évaluation
- TP 3Document4 pagesTP 3Hadil Sellami100% (1)
- TP2: Paramètres Du Schéma Équivalent de La Machine AsynchroneDocument9 pagesTP2: Paramètres Du Schéma Équivalent de La Machine AsynchroneFar Idd agPas encore d'évaluation
- ElectrotechniqueDocument8 pagesElectrotechniquefarroukh med waelPas encore d'évaluation
- TP CommandeDocument6 pagesTP Commandevan picaboPas encore d'évaluation
- TP1 Commande Des Machines Electrique Simulation de MCCDocument15 pagesTP1 Commande Des Machines Electrique Simulation de MCCSabri Loucif50% (2)
- Régulation D'un Moteur MCC PDFDocument58 pagesRégulation D'un Moteur MCC PDFIly'as En-naouiPas encore d'évaluation
- TP2 MSDocument5 pagesTP2 MShouda elmoudanePas encore d'évaluation
- Couplage Des PompeDocument8 pagesCouplage Des PompeHoussem Eddine Rachid HAMIDIPas encore d'évaluation
- TP1 Machine AsynchroneDocument7 pagesTP1 Machine Asynchrone22073 22073Pas encore d'évaluation
- TP Machine 2Document6 pagesTP Machine 2abdeslam riahiPas encore d'évaluation
- Travaux Pratiques Machine Thermique: TP Moteur À Combustion InterneDocument7 pagesTravaux Pratiques Machine Thermique: TP Moteur À Combustion InterneRihem AbdelmalekPas encore d'évaluation
- Fiche de ReponseDocument7 pagesFiche de ReponseAchraf BoulifPas encore d'évaluation
- TP2-Association moteur-courant-continu-redressement-PD3Document7 pagesTP2-Association moteur-courant-continu-redressement-PD3You Cef100% (1)
- TP_HACHEUR_A1.2Document10 pagesTP_HACHEUR_A1.2biticar85Pas encore d'évaluation
- CR Atlier 2Document18 pagesCR Atlier 2Anass NafilPas encore d'évaluation
- Projet Bureau D'étude II Éléments Et Architectures Des MachinesDocument13 pagesProjet Bureau D'étude II Éléments Et Architectures Des MachinesKhalil HmPas encore d'évaluation
- TP HammoudaDocument6 pagesTP HammoudaHoucem B HsnPas encore d'évaluation
- TP N°1 CommandeDocument6 pagesTP N°1 CommandeHoussam Rekibi100% (2)
- DM1 SP2021Document3 pagesDM1 SP2021Hunt MarkPas encore d'évaluation
- Cr2 ModélisationDocument11 pagesCr2 ModélisationJaoui RachidPas encore d'évaluation
- TP Hacheur SérieDocument12 pagesTP Hacheur SérieÃd ËlPas encore d'évaluation
- Travaux Pratiques Du Module MECANIQUE FLUIDEDocument14 pagesTravaux Pratiques Du Module MECANIQUE FLUIDEHeba Bk100% (1)
- TP N°04 - Variation de Vitesse Du MAS Alimenté Par OnduleurDocument8 pagesTP N°04 - Variation de Vitesse Du MAS Alimenté Par OnduleurYou CefPas encore d'évaluation
- tp2 CMNDHDocument19 pagestp2 CMNDHHanae BoutabaPas encore d'évaluation
- CR.2 Machine ElectriqueDocument5 pagesCR.2 Machine ElectriqueAl khalifa TALLPas encore d'évaluation
- TP N° 02 Association Moteur À Courant Continu À Excitation SéparéeDocument7 pagesTP N° 02 Association Moteur À Courant Continu À Excitation Séparéeahlem.boucharebPas encore d'évaluation
- Compte Rendu de TP: Machine À Courant Continue Machine Asynchrone Machine SynchroneDocument27 pagesCompte Rendu de TP: Machine À Courant Continue Machine Asynchrone Machine SynchroneSuma Yà80% (10)
- Département Génie ÉnergétiqueDocument15 pagesDépartement Génie ÉnergétiqueAhmed Abadel-ghaniPas encore d'évaluation
- td9 PSP1Document9 pagestd9 PSP1Aness SilverPas encore d'évaluation
- Le Rendement D'une MachineDocument4 pagesLe Rendement D'une MachineBounegab YoucefPas encore d'évaluation
- ZZ3957Document2 pagesZZ3957Merveil BorgeasPas encore d'évaluation
- TP 2 ELTDocument6 pagesTP 2 ELTmor sliPas encore d'évaluation
- Moteur Asynchrone TriphaseDocument5 pagesMoteur Asynchrone TriphaseHATATOKOUPas encore d'évaluation
- TP Machine 1Document9 pagesTP Machine 1abdeslam riahiPas encore d'évaluation
- CHERGUIII2Document9 pagesCHERGUIII2Masouda NaboulaPas encore d'évaluation
- CR.2 Machine ElectriqueDocument6 pagesCR.2 Machine ElectriqueAl khalifa TALLPas encore d'évaluation
- Détermination de La Section Des Conducteurs 2Document10 pagesDétermination de La Section Des Conducteurs 2Moncef SkPas encore d'évaluation
- Simulation MCCDocument24 pagesSimulation MCCOkbaBtb100% (8)
- TP 2Document9 pagesTP 2salmabellakhyaletPas encore d'évaluation
- TP 4Document6 pagesTP 4Saif ElgharselleouiPas encore d'évaluation
- Cr2 ModélisationDocument11 pagesCr2 ModélisationJaoui RachidPas encore d'évaluation
- Compte Rendu TP Electronique de PuissanceDocument47 pagesCompte Rendu TP Electronique de PuissanceMakrani Brahim80% (10)
- Rapport MASDocument8 pagesRapport MASKnox ChaliPas encore d'évaluation
- Rapport Sur Thème MCC+hacheurDocument23 pagesRapport Sur Thème MCC+hacheurSalah Eddine MaimouniPas encore d'évaluation
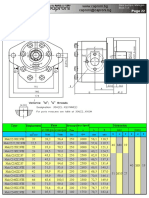
- 30A (C) ... X237H: WWW - Caproni.bg Caproni@caproni - BGDocument1 page30A (C) ... X237H: WWW - Caproni.bg Caproni@caproni - BGIshq MohabbatPas encore d'évaluation
- Courant ContinueDocument12 pagesCourant ContinueRania TrimechPas encore d'évaluation
- TP 1 ContinueDocument4 pagesTP 1 ContinueAymen HallamiPas encore d'évaluation
- TP 6 - Moteur Asynchrone A Cage (Caractéristiques Et Fonctionnement) (1) (Récupéré)Document12 pagesTP 6 - Moteur Asynchrone A Cage (Caractéristiques Et Fonctionnement) (1) (Récupéré)ayanokojiPas encore d'évaluation
- Electro FreinDocument2 pagesElectro FreinBeely ZinePas encore d'évaluation
- TP La Cavitation Dans Les PompesDocument7 pagesTP La Cavitation Dans Les PompesStukine100% (1)
- KOUSTA KHALID Compte-RenduDocument7 pagesKOUSTA KHALID Compte-RenduJalal BendaoudPas encore d'évaluation
- Détermination Des Paramètres Du Moteur À Courant Continu: Réalisé Par: Mr. Mohammed KissaouiDocument11 pagesDétermination Des Paramètres Du Moteur À Courant Continu: Réalisé Par: Mr. Mohammed KissaouiKooraNow HD100% (1)
- TP 1Document6 pagesTP 1Mira BkhPas encore d'évaluation
- Informe LAB - 1Document31 pagesInforme LAB - 1Andres FloresPas encore d'évaluation
- TP 1Document7 pagesTP 1ahlem.boucharebPas encore d'évaluation
- CV Taveau PratiqueDocument8 pagesCV Taveau Pratiquekarim chouarPas encore d'évaluation
- TP N°1Document8 pagesTP N°1Houssam RekibiPas encore d'évaluation
- Dimensionnement de La Station de PompageDocument2 pagesDimensionnement de La Station de PompageboscoPas encore d'évaluation
- AbdouDocument2 pagesAbdouIssam Rälph LåûręnPas encore d'évaluation
- TP4 CMDocument8 pagesTP4 CMIssam Rälph Låûręn100% (1)
- Chapitre I-IIDocument24 pagesChapitre I-IIIssam Rälph LåûręnPas encore d'évaluation
- Remercie MentDocument1 pageRemercie MentIssam Rälph LåûręnPas encore d'évaluation
- Semi ConducteurDocument7 pagesSemi ConducteurIssam Rälph LåûręnPas encore d'évaluation
- PrésentationDocument2 pagesPrésentationIssam Rälph LåûręnPas encore d'évaluation
- Plancher HourdisDocument3 pagesPlancher HourdisMomar Diop100% (1)
- Plancher IssamDocument43 pagesPlancher IssamIssam Rälph Låûręn100% (1)
- Voiles Et PoutresDocument1 pageVoiles Et PoutresIssam Rälph LåûręnPas encore d'évaluation
- Chapitre 3 L'imputation Rationelle Des Charges FixesDocument5 pagesChapitre 3 L'imputation Rationelle Des Charges Fixesghassen Ben hlimaPas encore d'évaluation
- Estimation IncertitudesDocument35 pagesEstimation IncertitudesBacem Chaabane100% (1)
- Cours Vprocess PDFDocument47 pagesCours Vprocess PDFMohamed LaliouiPas encore d'évaluation
- AnouarDocument6 pagesAnouarAnouar Mca DebbabiPas encore d'évaluation
- Calcul D'un Volant D'inertieDocument19 pagesCalcul D'un Volant D'inertieNathan KibilaPas encore d'évaluation
- Integral 18 Complet PDFDocument28 pagesIntegral 18 Complet PDFBouazizi HechmiPas encore d'évaluation
- Crackme 4 - Le Chiffre Inconnu PDFDocument3 pagesCrackme 4 - Le Chiffre Inconnu PDFFrançois MolletPas encore d'évaluation
- Reru 125 0857Document19 pagesReru 125 0857سناء المقدسيPas encore d'évaluation
- Panneaux Avec Portées-Web-PapDocument24 pagesPanneaux Avec Portées-Web-PapchouaibPas encore d'évaluation
- Examens Corrigés Examens Corrigés: Sciences Des Matériaux Sciences Des MatériauxDocument31 pagesExamens Corrigés Examens Corrigés: Sciences Des Matériaux Sciences Des Matériauxkoruko basketPas encore d'évaluation
- Partie Mecanique Frein Graisseur Boudin Rames z2m Cours DumDocument29 pagesPartie Mecanique Frein Graisseur Boudin Rames z2m Cours DumAbdou Benziane50% (2)
- Bac Blanc (Lycée Pilote El Kef) - Mathématiques - Bac Math (2007-2008) 2Document3 pagesBac Blanc (Lycée Pilote El Kef) - Mathématiques - Bac Math (2007-2008) 2Seif Souid80% (5)
- CryptographieDocument42 pagesCryptographieYoussef AlsabekPas encore d'évaluation
- Problemes BasiquesDocument157 pagesProblemes BasiquesHayat Wamra100% (2)
- PythagoreDocument13 pagesPythagorelemoga75yahoo.frPas encore d'évaluation
- Geometrie VectorielleDocument44 pagesGeometrie VectorielleAdel Fehri100% (1)
- Langage Sas EnsaeDocument124 pagesLangage Sas EnsaeMohamedPas encore d'évaluation
- Cihm 92121Document261 pagesCihm 92121AlexandreSidantPas encore d'évaluation
- 2MRLMD Affectation v1Document2 pages2MRLMD Affectation v1Riadh AlianiPas encore d'évaluation
- TrigonometrieDocument3 pagesTrigonometrieSafaePas encore d'évaluation
- 07 Decouverte Utilisation ElasticsearchDocument33 pages07 Decouverte Utilisation ElasticsearchChristian BibouePas encore d'évaluation
- Types de Compresseurs D'airDocument24 pagesTypes de Compresseurs D'airrocceli nzoulouPas encore d'évaluation
- Cours VB - Net 2023 - 100537Document96 pagesCours VB - Net 2023 - 100537Paulin KABEYAPas encore d'évaluation
- Devoir de Synthèse N°2 - SVT - 1ère AS (2011-2012) MR Korbi WissemDocument3 pagesDevoir de Synthèse N°2 - SVT - 1ère AS (2011-2012) MR Korbi WissemSassi LassaadPas encore d'évaluation
- Rapport 2021 Hajri MarwaDocument30 pagesRapport 2021 Hajri MarwaMarwa HajriPas encore d'évaluation
- Session 1 2013 2014Document8 pagesSession 1 2013 2014Yc YacinePas encore d'évaluation
- Cours Electricite GeneraleDocument35 pagesCours Electricite Generaleyassine_elmay2033Pas encore d'évaluation
- TD DHCPDocument2 pagesTD DHCPomrani.ahmed2002Pas encore d'évaluation
- BelghiniDocument14 pagesBelghiniElmehdi BenhmidiPas encore d'évaluation
- CoursDocument84 pagesCoursClaude Armel MenouaPas encore d'évaluation