Vous aimerez peut-être aussi
- Cours ch7 Produit Scalaire EspaceDocument10 pagesCours ch7 Produit Scalaire EspaceriderfortnitePas encore d'évaluation
- Le CoursDocument8 pagesLe Coursyassine el kassirPas encore d'évaluation
- Cours Mécanique Des Systèmes de Solides Et de Points MatérielsDocument118 pagesCours Mécanique Des Systèmes de Solides Et de Points MatérielsAly GAMALEDDYNPas encore d'évaluation
- Corrigé CC1-1 Reseaux ElectriqueDocument7 pagesCorrigé CC1-1 Reseaux Electriquemohamedhoussam62Pas encore d'évaluation
- Produit Scalaire Etude AnalytiqueDocument5 pagesProduit Scalaire Etude AnalytiqueJaouad FilaliPas encore d'évaluation
- Cours ActionsmecaDocument9 pagesCours Actionsmecasaid fadloPas encore d'évaluation
- Poa BMMTDocument91 pagesPoa BMMTAnge KamguengPas encore d'évaluation
- COURS MECA1 - Chapitre1 - DéfinitifDocument6 pagesCOURS MECA1 - Chapitre1 - DéfinitifFULGENCE DIBIPas encore d'évaluation
- Cours GE1 S2Document24 pagesCours GE1 S2Elhabib ElkhotfiPas encore d'évaluation
- °°cours Mecanique Solide Fsa-Agadir SMP3 20-21 PDFDocument37 pages°°cours Mecanique Solide Fsa-Agadir SMP3 20-21 PDFAkerkouch OmarPas encore d'évaluation
- Chapitre I - Calcul VectorielDocument6 pagesChapitre I - Calcul VectorielAlilo Vic100% (1)
- Produit Scalaire ApplicationsDocument4 pagesProduit Scalaire ApplicationsCorinne CotoniPas encore d'évaluation
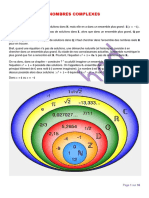
- Nombres Complexes: Page 1 Sur 16Document16 pagesNombres Complexes: Page 1 Sur 16maryem hamzaPas encore d'évaluation
- Orthogonalité Dans L'espaceDocument6 pagesOrthogonalité Dans L'espaceNicolas AktromPas encore d'évaluation
- Mathématiques 1: Autour de La Transformation de RadonDocument4 pagesMathématiques 1: Autour de La Transformation de RadonAmine LahlalPas encore d'évaluation
- Espaces Vectoriels ReelsDocument7 pagesEspaces Vectoriels Reelsyoussef labrahimiPas encore d'évaluation
- Cours CinématiqueDocument8 pagesCours CinématiqueAsyncrite BAKASSAPas encore d'évaluation
- Cours Math Résumé Tome II CH 01 Nombres Complexes Bac Mathématiques Bac Math 2016 2017 (MR Benjeddou Saber)Document6 pagesCours Math Résumé Tome II CH 01 Nombres Complexes Bac Mathématiques Bac Math 2016 2017 (MR Benjeddou Saber)Chokri BesbesPas encore d'évaluation
- Géométrie Dans Le Plan Et Dans L'espaceDocument7 pagesGéométrie Dans Le Plan Et Dans L'espacekakashihaku59Pas encore d'évaluation
- TD4 Cinã©matiqueDocument2 pagesTD4 Cinã©matiqueSaad JebbariPas encore d'évaluation
- Cours Espace BacDocument5 pagesCours Espace BacMarouaneHaddadPas encore d'évaluation
- Le Principe D Inertie Cours 4 1Document4 pagesLe Principe D Inertie Cours 4 1Jihad EL100% (1)
- Electricité (PHY1101) FialDocument49 pagesElectricité (PHY1101) Fialsanogoalima715Pas encore d'évaluation
- TD2 L1-MPI CHP Pot Cdteurs 2019-20 CorrectionDocument11 pagesTD2 L1-MPI CHP Pot Cdteurs 2019-20 CorrectionIbrahima SkPas encore d'évaluation
- GEOMETRIEDocument19 pagesGEOMETRIEOnanena FaldiPas encore d'évaluation
- Maths 1 Ere S TD 4 Uniquement S 1Document2 pagesMaths 1 Ere S TD 4 Uniquement S 1JacksonPas encore d'évaluation
- Faz 4 Complexes SC Exp Et SC TechDocument6 pagesFaz 4 Complexes SC Exp Et SC TechmouynmehdyPas encore d'évaluation
- Résumé Produit Scalaire Plan 1bacDocument1 pageRésumé Produit Scalaire Plan 1bacjilalixmcPas encore d'évaluation
- FICHE 4 - Complement Sur Les Fonctions, Limites Et ContinuiteDocument12 pagesFICHE 4 - Complement Sur Les Fonctions, Limites Et ContinuiteSommiePas encore d'évaluation
- Nombres Complexes 1 Cours 1 1Document10 pagesNombres Complexes 1 Cours 1 1Naroto KakachiPas encore d'évaluation
- Cours 1Document2 pagesCours 1Zakaria EzziyadiPas encore d'évaluation
- Enoncé Cor Faz 11 Compleexs Intégral SC ExpDocument5 pagesEnoncé Cor Faz 11 Compleexs Intégral SC ExptahamkadPas encore d'évaluation
- Points Cours - Mouvement Dans Un Champ UniformeDocument6 pagesPoints Cours - Mouvement Dans Un Champ UniformesocranedeoufPas encore d'évaluation
- Reperage CartesienDocument5 pagesReperage Cartesienadamadem19Pas encore d'évaluation
- Demonstration Au Programme de La TC & TD RDocument3 pagesDemonstration Au Programme de La TC & TD RHabib CastrolePas encore d'évaluation
- Cours Algèbre 2Document33 pagesCours Algèbre 2Savadogo LeRobotprogrammer PourdetruiPas encore d'évaluation
- Chapitre IDocument18 pagesChapitre IMamadou BambaPas encore d'évaluation
- Outils Mathématiques Pour La PhysiqueDocument3 pagesOutils Mathématiques Pour La Physiquevnguema8Pas encore d'évaluation
- 298269Document23 pages298269Hasina AndlPas encore d'évaluation
- SkalarproduktDocument4 pagesSkalarproduktimad haddiouiPas encore d'évaluation
- Resume Produit ScalireDocument3 pagesResume Produit ScalireFast StorePas encore d'évaluation
- Bac C 2014Document3 pagesBac C 2014Miguel Foyou100% (1)
- Applications Des Lois de Newton Les Mouvements PlansDocument8 pagesApplications Des Lois de Newton Les Mouvements PlansArmand FofePas encore d'évaluation
- Devoir Surveillée-6-A - 2 Bac Sc-CorrigéeDocument8 pagesDevoir Surveillée-6-A - 2 Bac Sc-CorrigéeRania BarcaPas encore d'évaluation
- 1BAC SM & Biof Prof: Fayssal Lycee Abde El MoumenDocument2 pages1BAC SM & Biof Prof: Fayssal Lycee Abde El Moumenimed ouniPas encore d'évaluation
- Le Barycentre Dans Le Plan Cours 1 4Document6 pagesLe Barycentre Dans Le Plan Cours 1 4Ahmed BaggarPas encore d'évaluation
- Physique StatiqueDocument42 pagesPhysique StatiquekarlvoyemacoPas encore d'évaluation
- Exercices ProduitScalaireTSTD2ADocument4 pagesExercices ProduitScalaireTSTD2Amohamednajmii766Pas encore d'évaluation
- Chap 2Document9 pagesChap 2Mikhael QUENUMPas encore d'évaluation
- Cours Résumé Partie II CH 1 Et 2 Nombres Complexes 2016 2017 (MR Benjeddou Saber)Document6 pagesCours Résumé Partie II CH 1 Et 2 Nombres Complexes 2016 2017 (MR Benjeddou Saber)lambayld6669Pas encore d'évaluation
- Série 2 PDFDocument2 pagesSérie 2 PDFHamza TliliPas encore d'évaluation
- TD0 Connaissances Préalables RecommandéesDocument5 pagesTD0 Connaissances Préalables RecommandéesWassim GtmoPas encore d'évaluation
- Downloadfile 4.binDocument2 pagesDownloadfile 4.binFaty El BakkaliPas encore d'évaluation
- Examen L1-MPI Sem1 Ratt 2018-19Document6 pagesExamen L1-MPI Sem1 Ratt 2018-19thierry D100% (1)
- Introduction A La Methode Des Elements FinisDocument71 pagesIntroduction A La Methode Des Elements FinisWilfried FaboPas encore d'évaluation
- Cours Mécanique Quantique L2 Chap 2 NewDocument13 pagesCours Mécanique Quantique L2 Chap 2 NewFabrice ArriaPas encore d'évaluation
- Cours de Robotique - 3ème AT - VERSION 2021-29-49Document21 pagesCours de Robotique - 3ème AT - VERSION 2021-29-49Douaa GhazouaniPas encore d'évaluation
- Maths 2C - L10 - Produit ScalaireDocument13 pagesMaths 2C - L10 - Produit Scalaireben danPas encore d'évaluation
- 496-Article Text-1860-1-10-20200827Document20 pages496-Article Text-1860-1-10-20200827Ell IlhamPas encore d'évaluation
- Camille Flammarion - Astronomie Populaire (1880)Document871 pagesCamille Flammarion - Astronomie Populaire (1880)Vlad Gheorghita100% (1)
- Claude Frere. Couvertures Paris MatchDocument9 pagesClaude Frere. Couvertures Paris MatchDavid CastroPas encore d'évaluation
- Cours Ecoulements en Charge Chap 1Document18 pagesCours Ecoulements en Charge Chap 1nejla100% (1)
- Gestion PériméeDocument20 pagesGestion Périméedos saphirPas encore d'évaluation
- CO Chroniques Oubliees Fantasy 11 11Document1 pageCO Chroniques Oubliees Fantasy 11 11jeaneoPas encore d'évaluation
- Wurfel Bingo Scoresheet GreenDocument2 pagesWurfel Bingo Scoresheet GreenSébastien PorcelPas encore d'évaluation
- Approche Du Fonctionnement Cognitif Chez L'Enfant SurdouéDocument60 pagesApproche Du Fonctionnement Cognitif Chez L'Enfant SurdouéCaroline BaillezPas encore d'évaluation
- Groupe N°21 - La Méthode Des Cinq SDocument9 pagesGroupe N°21 - La Méthode Des Cinq SOverDoc100% (3)
- 612b2668d2004devoir de Maths Niveau 4eme College Moderne de BouDocument2 pages612b2668d2004devoir de Maths Niveau 4eme College Moderne de BouUrdin TOUMBAMONGO KHOTATPas encore d'évaluation
- Cinématique Du Solide - ExtraitDocument8 pagesCinématique Du Solide - ExtraitSékhou DiakitéPas encore d'évaluation
- 9 Textes Sur La Citoyenneté Et La Justice (ARISTOTE)Document9 pages9 Textes Sur La Citoyenneté Et La Justice (ARISTOTE)imouni87Pas encore d'évaluation
- TISSOT Constitution Des Organismes Vol2num 1936Document140 pagesTISSOT Constitution Des Organismes Vol2num 1936Ernesto SalvatorePas encore d'évaluation
- تخصص الترجمة المتخصّصةDocument9 pagesتخصص الترجمة المتخصّصةMarouene OuldbabaaliPas encore d'évaluation
- Fiche SynthèseDocument4 pagesFiche SynthèseHedwige LouisePas encore d'évaluation
- LASOTA de ANDRES Carmen 6TC - Synthèse 18ème SiècleDocument2 pagesLASOTA de ANDRES Carmen 6TC - Synthèse 18ème SiècleAla LalaPas encore d'évaluation
- Rimbaud, l' Émancipation Par La PoésieDocument3 pagesRimbaud, l' Émancipation Par La Poésieslimiahmed544Pas encore d'évaluation
- Cours Complet Pour L'enseignement Du (... ) Montgeroult Hélène bpt6k9741747r PDFDocument300 pagesCours Complet Pour L'enseignement Du (... ) Montgeroult Hélène bpt6k9741747r PDFStan FlorinPas encore d'évaluation
- Cas CliniqueDocument7 pagesCas Cliniquezara100% (1)
- Commuttant Cycliques PDFDocument3 pagesCommuttant Cycliques PDFAymen DanounPas encore d'évaluation
- Alice's Adventures in Wonderland de Traduction en Retraduction - La Scène Énonciative Mise À NuDocument9 pagesAlice's Adventures in Wonderland de Traduction en Retraduction - La Scène Énonciative Mise À Nuiranqajar2021Pas encore d'évaluation
- Massacres BamilekeDocument13 pagesMassacres BamilekeAlain Web-creatorPas encore d'évaluation
- Journal Sur L'identité, Les Relations PDFDocument44 pagesJournal Sur L'identité, Les Relations PDFMoustapha SarrPas encore d'évaluation
- Exam SMP1 Alg1SN Mars 2021Document1 pageExam SMP1 Alg1SN Mars 2021Mohamed AskoukPas encore d'évaluation
- EXCELTUTO Perso PDFDocument26 pagesEXCELTUTO Perso PDFMohamed BoumedienePas encore d'évaluation
- Cours 4 - Risque ChimiqueDocument80 pagesCours 4 - Risque Chimiquemoussa mrzgPas encore d'évaluation
- Les Cent Mensonges de VincentDocument11 pagesLes Cent Mensonges de VincentPainted HenPas encore d'évaluation
- V1 Routes BidirectionnellesDocument96 pagesV1 Routes BidirectionnellesDavide LeviPas encore d'évaluation
- Support Challenge 1Document141 pagesSupport Challenge 1nomenarakotovaooPas encore d'évaluation
- Gardons-Nous Des IdolesDocument10 pagesGardons-Nous Des IdolesCryspus AssoukaviPas encore d'évaluation