Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Chapitre 3 Machine A Courant ContinuDocument75 pagesChapitre 3 Machine A Courant ContinutamsirniangPas encore d'évaluation
- Machine AsychroneDocument63 pagesMachine AsychroneAriston DecorPas encore d'évaluation
- Chapitre 3 MCCDocument76 pagesChapitre 3 MCCDl OramPas encore d'évaluation
- Moteurs AsynchroneDocument57 pagesMoteurs AsynchroneAbdelmajid AbouloifaPas encore d'évaluation
- Moteur ContinuDocument21 pagesMoteur Continujoe kanikiPas encore d'évaluation
- Chapitre 2 - Machine À Courant Continu - BAHRI - Partie 1 PDFDocument28 pagesChapitre 2 - Machine À Courant Continu - BAHRI - Partie 1 PDFApap TttaPas encore d'évaluation
- Chapitre 3 Machine A Courant ContinuDocument104 pagesChapitre 3 Machine A Courant ContinuConstant MinoungouPas encore d'évaluation
- 7-Cours Asynchrone EEADocument21 pages7-Cours Asynchrone EEAyassin akkninnPas encore d'évaluation
- Modélisation de La Génératrice AsynchroneDocument33 pagesModélisation de La Génératrice AsynchroneLaila JamilPas encore d'évaluation
- 2ie l3 Entreposage Frigorifique Diapos 1Document46 pages2ie l3 Entreposage Frigorifique Diapos 1Madjid OuedraogoPas encore d'évaluation
- Les Moteurs Asynchrones: GénéralitésDocument23 pagesLes Moteurs Asynchrones: GénéralitésSousou KarimaPas encore d'évaluation
- 3.moteur Asynchrone PDFDocument51 pages3.moteur Asynchrone PDFHicham Bakkali100% (5)
- Machine_synchroneDocument63 pagesMachine_synchroneali ghaffariPas encore d'évaluation
- 03 - slides_GM47_part2_v2Document39 pages03 - slides_GM47_part2_v2Ahmed KhalilPas encore d'évaluation
- Demareur EmpDocument26 pagesDemareur EmphocinekhanfriPas encore d'évaluation
- Alternateur & Excitation Notions de BaseDocument14 pagesAlternateur & Excitation Notions de BasemohamedPas encore d'évaluation
- Les Moteurs À Courant Continu, Synchrone Et AsynchroneDocument11 pagesLes Moteurs À Courant Continu, Synchrone Et AsynchroneHamza NabilPas encore d'évaluation
- Machine À Courant Continu NotionDocument32 pagesMachine À Courant Continu NotionNoureddine BimgdiPas encore d'évaluation
- Chapitre 2 - MCC - ÉtudiantsDocument43 pagesChapitre 2 - MCC - ÉtudiantsminatoonPas encore d'évaluation
- Circuits Magnétiques Des MachinesDocument1 pageCircuits Magnétiques Des MachinesHassan BouamoudPas encore d'évaluation
- Parametres D'une Cage D'ecureuil 1 PDFDocument9 pagesParametres D'une Cage D'ecureuil 1 PDFshekikazemb25Pas encore d'évaluation
- Les Moteurs À Courant Continu, Synchrone Et AsynchroneDocument11 pagesLes Moteurs À Courant Continu, Synchrone Et AsynchroneHamza Nabil100% (1)
- Syllabus Des Machines Electriques G2 ETRIDocument103 pagesSyllabus Des Machines Electriques G2 ETRIjonathannganduzddPas encore d'évaluation
- Mini-Projet Maintenance IndusterilleDocument15 pagesMini-Projet Maintenance Industerillesatisfying541Pas encore d'évaluation
- Dvanaesto Predavanje 2017 - Sinhrone MasineDocument46 pagesDvanaesto Predavanje 2017 - Sinhrone MasineIvan StanojevićPas encore d'évaluation
- 0 - Moteur Asynchrone A Cage Final - Docx Li ELM-1Document15 pages0 - Moteur Asynchrone A Cage Final - Docx Li ELM-1Salim BelkhirPas encore d'évaluation
- Cours Mach Async00!10!3Document138 pagesCours Mach Async00!10!3Issa KantePas encore d'évaluation
- Mini ProjetDocument13 pagesMini ProjetHoussine Gue100% (3)
- Machine À Courant ContinuDocument6 pagesMachine À Courant Continuرضا بن عمارPas encore d'évaluation
- 2-Chapitre - Moteur Asyn - Partie2Document8 pages2-Chapitre - Moteur Asyn - Partie2مصعب دحمانيPas encore d'évaluation
- Moteur Dahlander Generalite Machine AsynchroneDocument14 pagesMoteur Dahlander Generalite Machine AsynchroneNadir IguernelalaPas encore d'évaluation
- Syllabus Tecnologie DDocument61 pagesSyllabus Tecnologie Djonathanzdd91Pas encore d'évaluation
- TP MachineDocument13 pagesTP Machinefadig4mez96Pas encore d'évaluation
- Construction de Machines Électriques Machines SynchronesDocument13 pagesConstruction de Machines Électriques Machines SynchronesAkram BenachourPas encore d'évaluation
- Chapitre 5 - Machine SynchroneDocument63 pagesChapitre 5 - Machine SynchroneOmom chamarohPas encore d'évaluation
- TransformateurDocument6 pagesTransformateursaadi34Pas encore d'évaluation
- La Machine À Courant Continu: GénéralitésDocument13 pagesLa Machine À Courant Continu: Généralitésouadah mohamedPas encore d'évaluation
- Expose Chapitre 5 MouradDocument23 pagesExpose Chapitre 5 MouradThe AlgerianmanPas encore d'évaluation
- Puissance Mécanique Puissance Électrique MCC Moteur MCC Génératrice Puissance Électrique Puissance MécaniqueDocument44 pagesPuissance Mécanique Puissance Électrique MCC Moteur MCC Génératrice Puissance Électrique Puissance MécaniqueAriston DecorPas encore d'évaluation
- Cours MCC 4e-BS2 2022Document19 pagesCours MCC 4e-BS2 2022Abdoulaye baPas encore d'évaluation
- Machines CC - Cours1 - CI - GEMI - S4 - BOULAALADocument60 pagesMachines CC - Cours1 - CI - GEMI - S4 - BOULAALAAyman Lamzouri100% (1)
- Moteurs Asynchrones TriphasésDocument34 pagesMoteurs Asynchrones TriphasésMajda SerbatPas encore d'évaluation
- Module: Electrotechnique: Chapitre 4: Machine Asynchrone Triphasée (Partie 1)Document38 pagesModule: Electrotechnique: Chapitre 4: Machine Asynchrone Triphasée (Partie 1)MERIEM LGARRAHPas encore d'évaluation
- Machines Tournantes A Courant ContinuDocument6 pagesMachines Tournantes A Courant ContinubenjarrayPas encore d'évaluation
- Chapitre 4 - Machine AsynchroneDocument113 pagesChapitre 4 - Machine AsynchroneOmom chamarohPas encore d'évaluation
- Electrotechnique 2 GET - Chap III - Machine SynchroneDocument13 pagesElectrotechnique 2 GET - Chap III - Machine Synchronerajaa latifiPas encore d'évaluation
- E04 Moteur AsynchroneDocument17 pagesE04 Moteur AsynchroneBabacarDiagoPas encore d'évaluation
- Electrotechnique Partie2-1Document28 pagesElectrotechnique Partie2-1May CrislyPas encore d'évaluation
- Machine Synchrone Annimation Et DetailsDocument45 pagesMachine Synchrone Annimation Et DetailsHaJar SolDaPas encore d'évaluation
- Les Machines Synchrones 2019-2020Document81 pagesLes Machines Synchrones 2019-2020sawadogo100% (3)
- Electrotechnique Chap7Document23 pagesElectrotechnique Chap7abdelfattah hamidouchePas encore d'évaluation
- ModelisationDocument23 pagesModelisationAymen43lal Aymen 43manPas encore d'évaluation
- Moteur ACDocument28 pagesMoteur ACFatimaPas encore d'évaluation
- Commande Du Moteur AsynchroneDocument78 pagesCommande Du Moteur AsynchroneTHONYPas encore d'évaluation
- Commande D'une Génératrice Asynchrone Double Stator Intégrée Dans Un Système Éolien À Vitesse VariableDocument19 pagesCommande D'une Génératrice Asynchrone Double Stator Intégrée Dans Un Système Éolien À Vitesse Variableعماد الدينPas encore d'évaluation
- Chapitre5 MASDocument10 pagesChapitre5 MASsmail chaariPas encore d'évaluation
- Memoire SpeDocument37 pagesMemoire Spesofianeprince777Pas encore d'évaluation
- Chapitre1_MAS_Triphasé️-BOUZI (2)Document10 pagesChapitre1_MAS_Triphasé️-BOUZI (2)kawtar elbirakiPas encore d'évaluation
- Incertitude SDocument2 pagesIncertitude SHalima TamboPas encore d'évaluation
- Datasheet KT5W-2P1116 1018044 FRDocument8 pagesDatasheet KT5W-2P1116 1018044 FRehoubePas encore d'évaluation
- Réalisation D'un Onduleur de Tension Commandé Par La Carte Dspace 1104 PDFDocument105 pagesRéalisation D'un Onduleur de Tension Commandé Par La Carte Dspace 1104 PDFpopamino100% (1)
- Dan T FC-300Document92 pagesDan T FC-300DENOUPas encore d'évaluation
- 1 Spe - Exercices TrigoDocument8 pages1 Spe - Exercices TrigoseckPas encore d'évaluation
- Transfert Thermique Exercices Corrigés 04Document2 pagesTransfert Thermique Exercices Corrigés 04Ali Z. Kanjo100% (2)
- Mécanique Des Fluides AvancéeDocument72 pagesMécanique Des Fluides AvancéeJoël Mètogbé ZinsaloPas encore d'évaluation
- Cemp RRDocument87 pagesCemp RRmomenPas encore d'évaluation
- Cours - Exploitation Des Energies Renouvelable 17 - 18Document44 pagesCours - Exploitation Des Energies Renouvelable 17 - 18jy100% (1)
- Mode Spectrale Et Analyse SismiqueDocument63 pagesMode Spectrale Et Analyse SismiqueZakaria IdrissiPas encore d'évaluation
- Compo1 20162017Document4 pagesCompo1 20162017GueyePas encore d'évaluation
- Referentiels2 PDFDocument16 pagesReferentiels2 PDFImen JabariPas encore d'évaluation
- TD Thermodynamique 2023 - Corrigé Série N°3Document7 pagesTD Thermodynamique 2023 - Corrigé Série N°3MidoxotkPas encore d'évaluation
- C71 Oscillateurs Amortis en Régime LibreDocument20 pagesC71 Oscillateurs Amortis en Régime LibreAdam ChPas encore d'évaluation
- Mecanique Du SolideDocument9 pagesMecanique Du SolideAbdePas encore d'évaluation
- Correction - Td3 - Semi - ConducteursDocument4 pagesCorrection - Td3 - Semi - ConducteursSamah AmeuriPas encore d'évaluation
- Chapitre 5Document30 pagesChapitre 5Tom HardyPas encore d'évaluation
- MEL-Poly-2021 - Fiche 3-Machines AsynchronesDocument2 pagesMEL-Poly-2021 - Fiche 3-Machines AsynchronesHamza CHAIBOUBPas encore d'évaluation
- TD Thermo L1chi 23 24 022637Document6 pagesTD Thermo L1chi 23 24 022637milandcalebPas encore d'évaluation
- Fiche TD N4 QEE CEMDocument2 pagesFiche TD N4 QEE CEMسمير المتوليPas encore d'évaluation
- Corrige DM GeotechniqueDocument12 pagesCorrige DM GeotechniquePape LeyePas encore d'évaluation
- TP n1 Bonlougou Ouenigamou Redressement MonophaseDocument19 pagesTP n1 Bonlougou Ouenigamou Redressement MonophasePaul BonlougouPas encore d'évaluation
- Invt FrançaisDocument89 pagesInvt Françaissotemag2022altax100% (1)
- Variable Frequency Drives Fra PDFDocument114 pagesVariable Frequency Drives Fra PDFMariane LopesPas encore d'évaluation
- Themec COURSDocument6 pagesThemec COURSJacquelin SouffrantPas encore d'évaluation
- Série D'exercices N°1 - Physique - Loi de Coulomb Champ Électrique - 3ème Informatique (2017-2018) MR Hedfi KhemaisDocument3 pagesSérie D'exercices N°1 - Physique - Loi de Coulomb Champ Électrique - 3ème Informatique (2017-2018) MR Hedfi Khemaisjosias zinsouPas encore d'évaluation
- MagnumDocument4 pagesMagnumAnas DahmouniPas encore d'évaluation
- Calcul AdductionDocument21 pagesCalcul AdductionWijdane HaouchPas encore d'évaluation
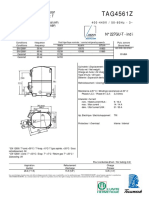
- Tag 4561 ZDocument2 pagesTag 4561 ZRicardo Dencker CortezPas encore d'évaluation
- 2BC El1 PDFDocument6 pages2BC El1 PDFAmineAbPas encore d'évaluation