Vous aimerez peut-être aussi
- Alimentations À Découpage Convertisseurs À ResonnanceDocument336 pagesAlimentations À Découpage Convertisseurs À Resonnancesabinebach100% (2)
- Le Moteur Synchrone À Rotor BobinéDocument20 pagesLe Moteur Synchrone À Rotor BobinéISLAM EDINEPas encore d'évaluation
- Cours FormationDocument68 pagesCours FormationMed ChetPas encore d'évaluation
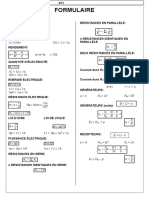
- Formulaire D ElectrotechniqueDocument4 pagesFormulaire D ElectrotechniqueralojakPas encore d'évaluation
- Moteurs Pas A PasDocument5 pagesMoteurs Pas A PasghadaPas encore d'évaluation
- Moteur Pas A PasDocument16 pagesMoteur Pas A PasÁł ÃăPas encore d'évaluation
- Les Moteurs ÉlectriquesDocument6 pagesLes Moteurs ÉlectriquesIlyessPas encore d'évaluation
- Mini Notes Cours Machines SpécialesDocument2 pagesMini Notes Cours Machines SpécialesHadil SellamiPas encore d'évaluation
- MpapDocument1 pageMpaplcomPas encore d'évaluation
- Le Moteur Pas À Pas Et Son Circuit de CommandeDocument14 pagesLe Moteur Pas À Pas Et Son Circuit de CommandeyassinePas encore d'évaluation
- Demareur EmpDocument26 pagesDemareur EmphocinekhanfriPas encore d'évaluation
- Moteur Vis Sans FinDocument6 pagesMoteur Vis Sans FinOussemaPas encore d'évaluation
- Mini ProjetDocument12 pagesMini ProjetWail Nou00Pas encore d'évaluation
- Moteur Pas À PasDocument15 pagesMoteur Pas À PasOumar MandodjoPas encore d'évaluation
- Etude Et RealisationDocument29 pagesEtude Et Realisationkengne DEFO darlinPas encore d'évaluation
- TP Moteur AsynchroneDocument3 pagesTP Moteur AsynchroneYOUNES KABBAJPas encore d'évaluation
- Chapitre2 Machine AsynchroneDocument26 pagesChapitre2 Machine Asynchroneafif tarkhaniPas encore d'évaluation
- COURS Electricité Industrielle 4et5Document32 pagesCOURS Electricité Industrielle 4et5Youcef KhelikaPas encore d'évaluation
- Machines Tournantes A Courant ContinuDocument6 pagesMachines Tournantes A Courant ContinubenjarrayPas encore d'évaluation
- Les Moteurs Electriques-2Document2 pagesLes Moteurs Electriques-2NinoPas encore d'évaluation
- Chapitre 2 - Machine À Courant Continu - BAHRI - Partie 1 PDFDocument28 pagesChapitre 2 - Machine À Courant Continu - BAHRI - Partie 1 PDFApap TttaPas encore d'évaluation
- 03 - slides_GM47_part2_v2Document39 pages03 - slides_GM47_part2_v2Ahmed KhalilPas encore d'évaluation
- Chapitre 5 - Machine SynchroneDocument63 pagesChapitre 5 - Machine SynchroneOmom chamarohPas encore d'évaluation
- Les Moteurs À Courant Continu, Synchrone Et AsynchroneDocument11 pagesLes Moteurs À Courant Continu, Synchrone Et AsynchroneHamza NabilPas encore d'évaluation
- Memoire Juste CompletDocument55 pagesMemoire Juste CompletLakssimi ImadPas encore d'évaluation
- 5-MCC Corr PDFDocument8 pages5-MCC Corr PDFAbdenour BenhalimaPas encore d'évaluation
- Cours MCC 4e-BS2 2022Document19 pagesCours MCC 4e-BS2 2022Abdoulaye baPas encore d'évaluation
- محرك خطوة خطوة PDFDocument1 pageمحرك خطوة خطوة PDFAllout MohamedPas encore d'évaluation
- Moteur ATRDocument15 pagesMoteur ATRMouh ZourdaniPas encore d'évaluation
- Les Moteurs À Courant Continu, Synchrone Et AsynchroneDocument11 pagesLes Moteurs À Courant Continu, Synchrone Et AsynchroneHamza Nabil100% (1)
- Les Machines Synchrones 2019-2020Document81 pagesLes Machines Synchrones 2019-2020sawadogo100% (3)
- 10 Alternateur V2 Partie 1 CorrectionDocument3 pages10 Alternateur V2 Partie 1 Correctionhamza7baccouchePas encore d'évaluation
- Les Moteurs Asynchrones: GénéralitésDocument23 pagesLes Moteurs Asynchrones: GénéralitésSousou KarimaPas encore d'évaluation
- Moteurs ÉlecDocument17 pagesMoteurs ÉleczroufongoibaPas encore d'évaluation
- Microsoft Word - Moteur Pas A PasDocument8 pagesMicrosoft Word - Moteur Pas A PasBa ChirPas encore d'évaluation
- La Machine À Courant Continu: GénéralitésDocument13 pagesLa Machine À Courant Continu: Généralitésouadah mohamedPas encore d'évaluation
- Expose Chapitre 5 MouradDocument23 pagesExpose Chapitre 5 MouradThe AlgerianmanPas encore d'évaluation
- Chapitre Les Machines À Courant Continu I. Le RôleDocument3 pagesChapitre Les Machines À Courant Continu I. Le RôleSankara IliassePas encore d'évaluation
- 2ie l3 Entreposage Frigorifique Diapos 1Document46 pages2ie l3 Entreposage Frigorifique Diapos 1Madjid OuedraogoPas encore d'évaluation
- Chapitre11 Principe MCCDocument4 pagesChapitre11 Principe MCCIbrahim MaigaPas encore d'évaluation
- Cour MCC GANMDocument10 pagesCour MCC GANMfaradmike95Pas encore d'évaluation
- Chapitre 3 MCCDocument76 pagesChapitre 3 MCCDl OramPas encore d'évaluation
- Chapitre IDocument4 pagesChapitre Isaidimarouane114Pas encore d'évaluation
- Chapitre 1 Actionneurs Section B ALLADDocument9 pagesChapitre 1 Actionneurs Section B ALLADYanis AtmPas encore d'évaluation
- 2-Chapitre - Moteur Asyn - Partie2Document8 pages2-Chapitre - Moteur Asyn - Partie2مصعب دحمانيPas encore d'évaluation
- Chapitre 1Document10 pagesChapitre 1Mika BadjioPas encore d'évaluation
- Syllabus Des Machines Electriques G2 ETRIDocument103 pagesSyllabus Des Machines Electriques G2 ETRIjonathannganduzddPas encore d'évaluation
- Chapitre 3 Machine A Courant ContinuDocument75 pagesChapitre 3 Machine A Courant ContinutamsirniangPas encore d'évaluation
- TP MachineDocument13 pagesTP Machinefadig4mez96Pas encore d'évaluation
- Moteur Pas A PasDocument7 pagesMoteur Pas A PasCherif FallPas encore d'évaluation
- Moteur Pas-À-Pas .Chapitre 1Document11 pagesMoteur Pas-À-Pas .Chapitre 1Adel Haunting Haddad100% (3)
- Machine AsynchroneDocument16 pagesMachine AsynchroneEr-Rhahmani MedPas encore d'évaluation
- AlternateurDocument6 pagesAlternateurmouf zerargaPas encore d'évaluation
- Machines A Courant Alternatif PDFDocument4 pagesMachines A Courant Alternatif PDFHmz OussamaPas encore d'évaluation
- Machines A Courant AlternatifDocument4 pagesMachines A Courant AlternatifMohamed Yacine RachediPas encore d'évaluation
- L'AlternateurDocument32 pagesL'AlternateurAbdelmallek RazkoPas encore d'évaluation
- Moteurs AsynchroneDocument57 pagesMoteurs AsynchroneAbdelmajid AbouloifaPas encore d'évaluation
- Chapitre.3.actionneursDocument11 pagesChapitre.3.actionneursFaten Bayou0% (1)
- UntitledDocument2 pagesUntitledSankara IliassePas encore d'évaluation
- 09 Principe de Fonctionnement Machine AsynchroneDocument16 pages09 Principe de Fonctionnement Machine AsynchroneTaoufiqBaouchPas encore d'évaluation
- Poly VHDL 2022-2023 Paysage ST JeromeDocument118 pagesPoly VHDL 2022-2023 Paysage ST Jeromeclaude feunePas encore d'évaluation
- Poly Rappel ENN 2022-2023 Portrait ST JeromeDocument63 pagesPoly Rappel ENN 2022-2023 Portrait ST Jeromeclaude feunePas encore d'évaluation
- Machines Electriques 2Document1 pageMachines Electriques 2claude feunePas encore d'évaluation
- ElectrotechniqueDocument77 pagesElectrotechniqueclaude feunePas encore d'évaluation
- Systemes Hydrauliques Et PneumatiqueDocument134 pagesSystemes Hydrauliques Et Pneumatiqueclaude feune100% (1)
- CHP 2Document16 pagesCHP 2zakaria khatirPas encore d'évaluation
- Principes de Base IrDocument40 pagesPrincipes de Base IrBellarguet Faouzi fawziPas encore d'évaluation
- Final 2005Document7 pagesFinal 2005Abd Errezak ChahoubPas encore d'évaluation
- Dispositif Differentiel ResiduelDocument2 pagesDispositif Differentiel ResiduelKANTE SOUMPas encore d'évaluation
- Les HacheursDocument18 pagesLes HacheursGrine Salah Eddine100% (1)
- Compte Rendu TP Archetecture Des Systèmes EmbarquésDocument19 pagesCompte Rendu TP Archetecture Des Systèmes EmbarquésKhawla KholitaPas encore d'évaluation
- Analog FiltreDocument13 pagesAnalog FiltreMhamdi AhlemPas encore d'évaluation
- Cour AdnanDocument217 pagesCour AdnanBoualem MestafaPas encore d'évaluation
- Véhicule Electrique Pfe. Adnane Jaoui - Smain Labdouni. Pierre Delarue - Arnaud ChielensDocument22 pagesVéhicule Electrique Pfe. Adnane Jaoui - Smain Labdouni. Pierre Delarue - Arnaud Chielensyahiaoui adelPas encore d'évaluation
- MV Instrument Transformers FR PDFDocument34 pagesMV Instrument Transformers FR PDFjeanPas encore d'évaluation
- Fonctions Analogiques Non LinéairesDocument14 pagesFonctions Analogiques Non LinéairesLôvë PärkërPas encore d'évaluation
- TP02 - Amplis SpéciauxDocument3 pagesTP02 - Amplis SpéciauxOUIAME NKHILI0% (1)
- Fiche Technique Onduleur - SG250HXDocument2 pagesFiche Technique Onduleur - SG250HXkaltoum elmnaouarPas encore d'évaluation
- 2 - Presentation MICROPACCDocument72 pages2 - Presentation MICROPACCRobert MartosPas encore d'évaluation
- TH T2191 HtakhedmitDocument190 pagesTH T2191 HtakhedmitabdellahmorPas encore d'évaluation
- Architecture Concentrateur Doxygène ConnectéDocument1 pageArchitecture Concentrateur Doxygène Connectédhaferahmed10Pas encore d'évaluation
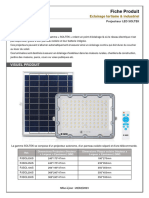
- FP - Ingelec - Luminaires - Led - Projecteurs Soltek - VaDocument5 pagesFP - Ingelec - Luminaires - Led - Projecteurs Soltek - VaYoussef AcherquiPas encore d'évaluation
- 1elec - L3-S1-2022Document46 pages1elec - L3-S1-2022zerrouki hichamPas encore d'évaluation
- GT900/901/902/903/904 GT905/906/907/908/909: Manuel D'Usage Et D'InstallationDocument20 pagesGT900/901/902/903/904 GT905/906/907/908/909: Manuel D'Usage Et D'InstallationImade EmadePas encore d'évaluation
- RTHF RLC SVX021D FR 0520Document60 pagesRTHF RLC SVX021D FR 0520matusiwamariaPas encore d'évaluation
- Chapitre 2 (Influence de La Température Sur La Position Du Niveau de Fermi)Document13 pagesChapitre 2 (Influence de La Température Sur La Position Du Niveau de Fermi)MEed E-tanPas encore d'évaluation
- CMP FinalDocument15 pagesCMP FinalAhmed KiredPas encore d'évaluation
- Rapport Bezza MostaphaDocument62 pagesRapport Bezza MostaphaEL-AARBAOUI ABDELJALILPas encore d'évaluation
- CAME ZA3 NoticeDocument12 pagesCAME ZA3 NoticeNicolas BuissonPas encore d'évaluation
- CSC4536Document50 pagesCSC4536Guency Alven Rhocky KOMBILAPas encore d'évaluation
- Commande Électronique Des Moteurs 3Document268 pagesCommande Électronique Des Moteurs 3MaGMaaa WKPas encore d'évaluation
- Notice Zelio Logic 2Document156 pagesNotice Zelio Logic 2koyabePas encore d'évaluation
- Energieplus-Lesite - Be-Détecteurs de Mouvement Et de Présenceabsence EclairageDocument11 pagesEnergieplus-Lesite - Be-Détecteurs de Mouvement Et de Présenceabsence EclairageAMINE AIT ABBOUPas encore d'évaluation