Académique Documents
Professionnel Documents
Culture Documents
690 ct207 Moteurs Elec PDF
690 ct207 Moteurs Elec PDF
Transféré par
فدوى غانيTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
690 ct207 Moteurs Elec PDF
690 ct207 Moteurs Elec PDF
Transféré par
فدوى غانيDroits d'auteur :
Formats disponibles
Collection Technique ..........................................................................
Cahier technique n 207
Les moteurs lectriques
pour mieux les piloter et les protger
E. Gaucheron
Building a New Electric World *
Les Cahiers Techniques constituent une collection dune centaine de titres
dits lintention des ingnieurs et techniciens qui recherchent une
information plus approfondie, complmentaire celle des guides, catalogues
et notices techniques.
Les Cahiers Techniques apportent des connaissances sur les nouvelles
techniques et technologies lectrotechniques et lectroniques. Ils permet-
tent galement de mieux comprendre les phnomnes rencontrs dans les
installations, les systmes et les quipements.
Chaque Cahier Technique traite en profondeur un thme prcis dans les
domaines des rseaux lectriques, protections, contrle-commande et des
automatismes industriels.
Les derniers ouvrages parus peuvent tre tlchargs sur Internet partir
du site Schneider Electric.
Code : http://www.schneider-electric.com
Rubrique : Presse
Pour obtenir un Cahier Technique ou la liste des titres disponibles contactez
votre agent Schneider Electric.
La collection des Cahiers Techniques sinsre dans la Collection Technique
de Schneider Electric.
Avertissement
L'auteur dgage toute responsabilit conscutive l'utilisation incorrecte des
informations et schmas reproduits dans le prsent ouvrage, et ne saurait
tre tenu responsable ni d'ventuelles erreurs ou omissions, ni de
consquences lies la mise en uvre des informations et schmas contenus
dans cet ouvrage.
La reproduction de tout ou partie dun Cahier Technique est autorise avec
la mention obligatoire :
Extrait du Cahier Technique Schneider Electric n ( prciser) .
n 207
Les moteurs lectriques
pour mieux les piloter et les protger
Etienne Gaucheron
Technicien suprieur en lectrotechnique, de formation. Aprs un
court passage chez Thomson il rejoint lactivit VVD (Variation de
Vitesse et Dmarreur) de Tlmcanique en 1970 ; puis tant au
service aprs vente Tlmcanique il complte sa formation aux
Arts et Mtiers de Paris.
Spcialiste de la commande des moteurs, il participe lvolution de
la variation de vitesse vers la commande des moteurs alternatifs. Son
exprience senrichit dans les diffrents postes quil occupe : plate-
formiste systme puis chef de produits variateurs pour machine-outil,
chef de produit variateur pour moteur asynchrone (produits Altivar) et
responsable de lquipe marketing projet de VVD.
Actuellement, il est le spcialiste applications autour de la
commande moteur au sein de lquipe anticipation pour lactivit PCP
(Protection et Commande de Puissance) de Schneider Electric.
CT 207 dition juin 2004
Cahier Technique Schneider Electric n 207 / p.2
Les moteurs lectriques
pour mieux les piloter et les protger
Les moteurs lectriques sont de nos jours, lexception des dispositifs
dclairage, les rcepteurs les plus nombreux dans les industries et les
installations tertiaires. Leur fonction, de convertir lnergie lectrique en
nergie mcanique, leur donne une importance conomique toute
particulire qui fait quaucun concepteur dinstallation ou de machine,
aucun installateur et aucun exploitant ne peut les ignorer.
Parmi tous les types de moteurs existants, les moteurs asynchrones
triphass notamment les moteurs cage sont les plus utiliss dans
lindustrie et au-del dune certaine puissance dans les applications du
btiment tertiaire. De plus, bien que leur commande par des quipements
contacteurs soit parfaitement adapte pour un grand nombre
d'applications, l'emploi de matriels lectroniques en constante
progression largit leur champ dapplication. Cest le cas pour contrler le
dmarrage et l'arrt avec les dmarreurs-ralentisseurs progressifs, comme
lorsqu'un rglage prcis de la vitesse est galement ncessaire avec les
variateurs-rgulateurs de vitesse.
Toutefois, les moteurs asynchrones bagues sont utiliss pour certaines
applications de forte puissance dans lindustrie et les moteurs asynchrones
monophass restent adapts pour des applications de puissances limites
plutt pour les applications du btiment.
Lutilisation des moteurs synchrones dits sans balais ou aimants
permanents associs des convertisseurs se gnralise dans les
applications ncessitant de fortes performances, notamment en couple
dynamique (au dmarrage ou aux changements de rgime), et en
prcision et plage de vitesse.
Ce Cahier Technique, aprs une prsentation des divers types de moteurs
lectriques et de leur principe de fonctionnement, dtaille plus
particulirement la technique et les particularits d'emploi des moteurs
asynchrones, notamment les principaux dispositifs de dmarrage, le
rglage de vitesse et le freinage qui leur sont associs. Il est une base de
connaissance minimale pour bien comprendre toute la problmatique que
reprsente le pilotage et la protection des moteurs.
Ce Cahier Technique aborde brivement la variation de vitesse des
moteurs lectriques. Ce sujet est trait spcifiquement dans le Cahier
Technique CT 208 Dmarreurs et variateurs de vitesse lectroniques .
La protection des moteurs fait lobjet dun Cahier Technique en cours de
rdaction.
Sommaire
1 Les moteurs asynchrones triphass 1.1 Principe de fonctionnement p. 4
1.2 Constitution p. 6
1.3 Les diffrents types de rotor p. 6
2 Les autres types de moteurs lectriques 2.1 Les moteurs asynchrones monophass p. 10
2.2 Les moteurs synchrones p. 10
2.3 Moteurs courant continu p. 14
3 Exploitation des moteurs asynchrones 3.1 Moteurs cage p. 17
3.2 Moteurs bagues p. 19
3.3 Autres systmes de variation de vitesse p. 20
4 Conclusion p. 22
Cahier Technique Schneider Electric n 207 / p.3
1 Les moteurs asynchrones triphass
Ce chapitre est consacr la prsentation des La prsentation des autres types de moteurs fait
moteurs asynchrones triphass, moteurs les lobjet du chapitre 2.
plus utiliss pour l'entranement des machines. La description et la comparaison des principaux
Ces moteurs simposent en effet dans un grand dispositifs de dmarrage, rglage de vitesse et
nombre d'applications en raison des avantages freinage qui leur sont associs font lobjet du
qu'ils prsentent : normaliss, ils sont robustes, chapitre 3.
simples dentretien, faciles mettre en uvre et
de faible cot.
1.1 Principe de fonctionnement
Le principe de fonctionnement d'un moteur
asynchrone repose sur la cration d'un courant
induit dans un conducteur lorsque celui-ci coupe
les lignes de force d'un champ magntique, d'o
le nom de moteur induction . Laction
Champ
combine de ce courant induit et du champ
magntique cre une force motrice sur le rotor
du moteur.
Supposons une spire ABCD en court-circuit,
situe dans un champ magntique B, et mobile Chemin
(force)
autour d'un axe xy (cf. fig. 1 ).
Si, par exemple, nous faisons tourner le champ
magntique dans le sens des aiguilles d'une
montre, la spire est soumise un flux variable et
devient le sige d'une force lectromotrice
induite qui donne naissance un courant induit i Courant
(loi de Faraday).
Fig. 2 : La rgle des trois doigts de la main droite pour
trouver la direction de la force.
A
x D'aprs la loi de Lenz, le sens du courant est tel
qu'il s'oppose par son action lectromagntique
Sud la cause qui lui a donn naissance. Chacun
D B des deux conducteurs est donc soumis une
force F de Laplace (de Lorentz, pour les Anglo-
saxons), de sens oppos son dplacement
relatif par rapport au champ inducteur.
i
i
La rgle des trois doigts de la main droite (action
Nord du champ sur un courant, cf. fig. 2 ) permet de
B dfinir facilement le sens de la force F applique
F
chaque conducteur.
Le pouce est plac dans le sens du champ de
F y l'inducteur. L'index indique le sens de la force.
Le majeur est plac dans le sens du courant
induit. La spire est donc soumise un couple qui
C provoque sa rotation dans le mme sens que le
champ inducteur, appel champ tournant. La
Fig. 1 : Cration dun courant induit dans une spire en spire se met donc en rotation et le couple
court-circuit. lectromoteur produit quilibre le couple
rsistant.
Cahier Technique Schneider Electric n 207 / p.4
Cration du champ tournant v le champ H3 augmente. Les 2 champs qui le
Trois enroulements, gomtriquement dcals composent ont tendance se rapprocher de
de 120, sont aliments chacun par une des l'axe OH3.
phases d'un rseau triphas alternatif Le flux correspondant la phase 3 est ngatif.
(cf. fig. 3 ). Les enroulements sont parcourus Le champ est donc dirig dans le sens oppos
par des courants alternatifs prsentant le mme la bobine.
dcalage lectrique, et qui produisent chacun un En superposant les trois diagrammes, nous
champ magntique alternatif sinusodal. Ce constatons que :
champ, toujours dirig suivant le mme axe, est
v les trois champs tournant dans le sens inverse
maximal quand le courant dans l'enroulement
des aiguilles d'une montre sont dcals de 120
est maximal.
et s'annulent,
v les trois champs tournant dans le sens des
aiguilles d'une montre se superposent. Ces
champs s'additionnent pour former le champ
tournant d'amplitude constante 3Hmax/2. C'est
H1 un champ une paire de ples.
B1
0
Ce champ effectue un tour pendant une priode
12
du courant d'alimentation. Sa vitesse est fonction
de la frquence du rseau (f), et du nombre de
paires de ples (p). Elle est appele vitesse de
B3 B2
synchronisme .
H3 H2
Glissement
Le couple moteur ne peut exister que si un
courant induit circule dans la spire. Ce couple
Ph3 Ph2 Ph1 est dtermin par le courant qui circule dans la
spire et qui ne peut exister que s'il existe une
variation de flux dans cette spire. Il faut donc
Fig. 3 : Principe dun moteur asynchrone triphas.
qu'il y ait une diffrence de vitesse entre la spire
et le champ tournant. C'est la raison pour
Le champ gnr par chaque enroulement est la laquelle un moteur lectrique fonctionnant
rsultante de deux champs qui tournent en sens suivant le principe que nous venons de dcrire
inverse et ayant chacun pour valeur constante la est appel moteur asynchrone . La diffrence
moiti de la valeur du champ maximal. A un entre la vitesse de synchronisme (Ns) et celle de
instant t1 quelconque de la priode (cf. fig. 4 ), la spire (N) est appele glissement (g) et
les champs produits par chaque enroulement s'exprime en % de la vitesse de synchronisme.
peuvent tre reprsents comme suit :
g = [(Ns - N) / Ns] x 100
v le champ H1 diminue. Les 2 champs qui le
composent ont tendance s'loigner de l'axe En fonctionnement, la frquence du courant
OH1, rotorique sobtient en multipliant la frquence
v le champ H2 augmente. Les 2 champs qui le dalimentation par le glissement. Au dmarrage
composent ont tendance se rapprocher de la frquence du courant rotorique est donc
l'axe OH2, maximale.
Ph1 Ph1 Ph1
H1
H3
H1 max H1 max H2 max H3 max
2 2 2 2
O O O H3 max
H2
2
Ph3 Ph3 Ph3
Ph2 Ph2 Ph2
H2 max
2
Fig. 4 : Champs gnrs par les trois phases.
Cahier Technique Schneider Electric n 207 / p.5
Le glissement en rgime tabli est variable en l'alimentant sous une frquence suprieure
suivant la charge du moteur et selon le niveau celle pour laquelle il est prvu, mme si la
de la tension dalimentation qui lui est appliqu : tension est adapte. Il convient en effet de
il est d'autant plus faible que le moteur est peu vrifier si ses conceptions mcanique et
charg, et il augmente si le moteur est sous lectrique le permettent.
aliment. A noter que compte tenu du glissement, les
vitesses de rotation en charge des moteurs
Vitesse de synchronisme
asynchrones sont lgrement infrieures aux
La vitesse de synchronisme des moteurs vitesses de synchronisme indiques dans le
asynchrones triphass est proportionnelle la tableau.
frquence du courant dalimentation et
inversement proportionnelle au nombre de
paires de ples constituant le stator.
Par exemple : Nombre Vitesse de rotation en tr/min
de ples
Ns = 60 f/p
Avec : 50 Hz 60 Hz 100 Hz
v Ns : vitesse de synchronisme en tr/min 2 3000 3600 6000
v f : frquence en Hz, 4 1500 1800 3000
v p : nombre de paires de ples. 6 1000 1200 2000
Pour les frquences industrielles de 50 Hz et 8 750 900 1500
60 Hz et une autre frquence (100 Hz), les 10 600 720 1200
vitesses de rotation du champ tournant, ou
vitesses de synchronisme, en fonction du 12 500 600 1000
nombre de ples, sont donnes dans le tableau 16 375 540 750
de la figure 5 .
Fig. 5 : Vitesses de synchronisme fonction du nombre
Dans la pratique il nest pas toujours possible de ples et de la frquence du courant.
d'augmenter la vitesse d'un moteur asynchrone
1.2 Constitution
Un moteur asynchrone triphas cage comporte moteur triphas). Chaque enroulement est
deux parties principales : un inducteur ou stator constitu de plusieurs bobines. Le mode de
et un induit ou rotor. couplage de ces bobines entre elles dfinit le
nombre de paires de ples du moteur, donc la
Le stator vitesse de rotation.
Cest la partie fixe du moteur. Une carcasse en
fonte ou en alliage lger renferme une couronne Le rotor
de tles minces (de l'ordre de 0,5 mm Cest llment mobile du moteur. Comme le
d'paisseur) en acier au silicium. Les tles sont circuit magntique du stator, il est constitu d'un
isoles entre elles par oxydation ou par un vernis empilage de tles minces isoles entre elles et
isolant. Le feuilletage du circuit magntique formant un cylindre clavet sur l'arbre du moteur.
rduit les pertes par hystrsis et par courants Cet lment, de par sa technologie, permet de
de Foucault. distinguer deux familles de moteurs asynchrones :
Les tles sont munies dencoches dans ceux dont le rotor est dit cage , et ceux dont
lesquelles prennent place les enroulements le rotor bobin est dit bagues .
statoriques destins produire le champ
tournant (trois enroulements dans le cas d'un
1.3 Les diffrents types de rotor
Le rotor cage cage). La cage est ferme par deux anneaux
Plusieurs types de rotor cage existent, ils sont rsistants (alliage particulier, section rduite,
tous conus selon lexemple de la figure 6 . anneaux d'inox ).
Ces moteurs prsentent un fort glissement au
En citant ces moteurs dans l'ordre du moins couple nominal.
rpandu au plus courant : Leur couple de dmarrage est lev et le
c Rotor cage rsistante courant de dmarrage faible (cf. fig. 7 ).
Le rotor rsistant existe surtout en simple cage En raison des pertes dans le rotor, leur
(voir plus loin la dfinition du moteur simple rendement est faible.
Cahier Technique Schneider Electric n 207 / p.6
Bote de
raccordement
Flasque palier
ct ventilateur
Enroulement
statorique
Roulement
Capot de
Ventilateur ventilation
Stator
Rotor cage
Roulement
Flasque palier
ct bout d'arbre
Fig. 6 : Eclat dun moteur rotor cage.
Ces moteurs sont en principe utiliss sur des train rouleaux dun laminoir, entranement dun
applications pour lesquelles il est intressant portique de levage ;
davoir du glissement afin dadapter la vitesse en v fonction enrouleur-drouleur partir de
fonction du couple, par exemple : moteurs Alquist (1) prvus cet effet ;
v cas de plusieurs moteurs lis mcaniquement v besoin dun fort couple de dmarrage avec un
sur lesquels doit tre rpartie la charge, tels que courant dappel limit (palans de levage ou
convoyeurs).
Ils permettent la variation de vitesse par
C modification de la seule tension, mais cette
application tend disparatre au profit des
convertisseurs de frquence. Si tous les moteurs
sont auto-ventils, certains moteurs avec rotor
cage rsistante sont moto-ventils (motorisation
distincte de leur ventilateur).
c Rotor simple cage
Dans des trous ou dans des encoches disposs
sur le pourtour du rotor ( lextrieur du cylindre
constitu par lempilage de tles) sont placs
des conducteurs relis chaque extrmit par
une couronne mtallique et sur lesquels vient
s'exercer le couple moteur gnr par le champ
tournant. Pour que le couple soit rgulier, les
0 N
Rotor simple cage
1. Ces moteurs asynchrones moto-ventils fort
Rotor double cage glissement sont utiliss en variation de vitesse, leur
courant au calage est voisin de leur courant nominal ; leur
Rotor cage rsistante
caractristique de couple/vitesse est trs plongeante.
Fig. 7 : Courbes couple/vitesse suivant les types de Avec une alimentation variable il est possible d'adapter
rotors cage ( Un). cette caractristique et de rgler le couple moteur en
fonction de la traction souhaite.
Cahier Technique Schneider Electric n 207 / p.7
conducteurs sont lgrement inclins par rapport c Rotor encoches profondes
l'axe du moteur. Lensemble a laspect dune C'est la ralisation standard.
cage dcureuil, do le nom de ce type de rotor. Les conducteurs rotoriques sont mouls dans
La cage dcureuil est gnralement les encoches du rotor qui sont de forme
entirement moule, (seuls les trs gros trapzodale dont le petit cot du trapze se
moteurs sont raliss l'aide de conducteurs situe l'extrieur du rotor.
insrs dans des encoches ). Laluminium est Le fonctionnement est analogue au moteur
inject sous pression et les ailettes de double cage : lintensit du courant rotorique
refroidissement, coules lors de la mme varie en fonction inverse de sa frquence.
opration, assurent la mise en court-circuit des Ainsi :
conducteurs du stator.
v Au dbut du dmarrage, le couple est lev et
Ces moteurs ont un couple de dmarrage
lappel de courant rduit.
relativement faible et le courant absorb lors de
la mise sous tension est trs suprieur au v En rgime tabli, la vitesse est sensiblement
courant nominal (cf. fig. 7 ). celle du moteur simple cage.
En contre partie ils ont un faible glissement au
Le rotor bobin (rotor bagues)
couple nominal.
Ces moteurs sont utiliss principalement en forte Dans des encoches pratiques la priphrie
puissance pour amliorer le rendement des du rotor sont logs des enroulements identiques
installations sur des pompes et ventilateurs. Ils ceux du stator (cf. fig. 8 ). Gnralement le
sont galement associs des convertisseurs rotor est triphas.
de frquence en vitesse variable, les problmes Une extrmit de chacun des enroulements est
de couple et de courant de dmarrage sont alors relie un point commun (couplage toile). Les
parfaitement rsolus. extrmits libres peuvent tre raccordes sur un
coupleur centrifuge ou sur trois bagues en
c Rotor double cage
cuivre, isoles et solidaires du rotor. Sur ces
Il comporte deux cages concentriques, lune
bagues viennent frotter des balais base de
extrieure, de faible section et assez rsistante,
graphite raccords au dispositif de dmarrage.
Iautre intrieure, de forte section et de
rsistance plus faible. En fonction de la valeur des rsistances
insres dans le circuit rotorique, ce type de
v Au dbut du dmarrage, les courants moteur peut dvelopper un couple de dmarrage
rotoriques tant frquence leve, l'effet de slevant jusqu 2,5 fois le couple nominal.
peau qui en rsulte fait que la totalit du courant
Le courant au dmarrage est sensiblement
rotorique circule la priphrie du rotor et donc
proportionnel au couple dvelopp sur larbre
dans une section rduite des conducteurs. Au
moteur.
dbut du dmarrage, le courant rotorique tant
Cette solution est de plus en plus abandonne
de frquence leve, le courant ne circule que
au profit de solutions lectroniques associes
dans la cage extrieure. Le couple produit par la
un moteur cage standard. En effet ces
cage extrieure rsistante est important et
dernires permettent de rsoudre des problmes
lappel de courant rduit (cf. fig. 7 ).
de maintenance (remplacement des balais
v En fin de dmarrage, la frquence diminue dalimentation du rotor uss, entretien des
dans le rotor, le passage du flux travers la rsistances de rglage), de rduire lnergie
cage intrieure est plus facile. Le moteur se dissipe dans ces rsistances et aussi
comporte alors sensiblement comme sil tait damliorer de faon importante le rendement de
construit avec une seule cage peu rsistante. linstallation.
En rgime tabli, la vitesse nest que trs
lgrement infrieure celle du moteur simple
cage.
Cahier Technique Schneider Electric n 207 / p.8
Couvercle d'accs
aux balais
Bote de
Flasque palier
raccordement
ct bagues
Roulement
Balais
Capot de
ventilation
Ventilateur
Bagues
Rotor bobin Stator
encoches
Roulement
Flasque palier
ct bout d'arbre
Fig. 8 : Eclat dun moteur rotor bagues.
Cahier Technique Schneider Electric n 207 / p.9
2 Les autres types de moteurs lectriques
2.1 Les moteurs asynchrones monophass
Le moteur asynchrone monophas, bien que A larrt, le stator tant aliment, ces champs
moins utilis dans lindustrie que son homologue prsentent le mme glissement par rapport au
triphas, reprsente nanmoins une part rotor et produisent par consquent deux couples
d'applications non ngligeable dans les petites gaux et opposs. Le moteur ne peut dmarrer.
puissances et dans les applications du btiment Une impulsion mcanique sur le rotor provoque
qui utilisent le rseau monophas 230 V . une ingalit des glissements. Lun des couples
A puissance gale, il est plus volumineux qu'un diminue pendant que lautre augmente. Le
moteur triphas. couple rsultant provoque le dmarrage du
Par ailleurs, son rendement et son cosinus moteur dans le sens o il a t lanc.
sont beaucoup plus faibles que dans le cas du Afin de rsoudre ce problme de couple lors de
triphas et ils varient considrablement en la phase de dmarrage, un deuxime bobinage
fonction dune part de la puissance, dautre part dcal de 90 est insr dans le stator. Cette
du constructeur. phase auxiliaire est alimente par un artifice de
Les moteurs monophass jusqu une dizaine dphasage (condensateur ou inductance) ; une
de kW sont dutilisation courante aux Etats Unis. fois le dmarrage effectu la phase auxiliaire
peut tre supprime.
Constitution
Nota : Un moteur triphas peut tre galement
Le moteur monophas, comme le moteur utilis en monophas, le condensateur de
triphas, est compos de deux parties : le stator dmarrage est alors insr en srie ou en
et le rotor. parallle avec lenroulement non utilis.
c Le stator
Il comporte un nombre pair de ples et ses
bobinages sont raccords sur le rseau
H
dalimentation. Enroulement Enroulement
c Le rotor statorique statorique
Il est le plus souvent cage dcureuil. H1 H2
Principe de fonctionnement L1 N
Considrons un stator comprenant deux Rotor
enroulements raccords sur le rseau
dalimentation L1 et N (cf. fig. 9 ).
Le courant alternatif monophas engendre dans
le rotor un champ alternatif simple H qui est la Fig. 9 : Principe de fonctionnement dun moteur
superposition de deux champs tournants H1 et asynchrone monophas.
H2 de mme valeur et de sens contraires.
2.2. Les moteurs synchrones
Constitution d'acier au silicium et dun bobinage triphas
Le moteur synchrone se compose, comme le analogue celui dun moteur asynchrone
aliment en courant alternatif triphas pour
moteur asynchrone, d'un stator et d'un rotor
produire un champ tournant.
spars par l'entrefer. Il s'en diffrencie par le
fait que le flux dans l'entrefer n'est pas d une c Le rotor
composante du courant statorique : il est cr Le rotor porte des aimants ou des bobines
par des aimants ou par le courant inducteur d'excitation parcourues par un courant continu
fourni par une source courant continu qui crent des ples Nord et Sud intercals. Le
extrieure qui alimente un enroulement plac rotor, la diffrence des machines asynchrones
dans le rotor. tourne sans glissement la vitesse du champ
tournant.
c Le stator Il existe donc deux types distincts de moteurs
Le stator comprend une carcasse et un circuit synchrones : les moteurs aimants et les
magntique gnralement constitus de tles moteurs rotor bobin.
Cahier Technique Schneider Electric n 207 / p.10
v Pour les premiers, le rotor du moteur est Caractristiques de fonctionnement
quip d'aimants permanents (cf. fig. 10 ), en Le couple moteur de la machine synchrone est
gnral en terre rare pour obtenir un champ proportionnel la tension ses bornes alors que
lev dans un volume rduit. Le stator comporte celui de la machine asynchrone est
les enroulements triphass. proportionnel au carr de cette tension.
Ces moteurs peuvent accepter des courants de Contrairement au moteur asynchrone, il peut
surcharge importants pour raliser des travailler avec un facteur de puissance gal
acclrations trs rapides. Ils sont toujours l'unit ou trs voisin de celle-ci.
associs un variateur de vitesse et ces
Le moteur synchrone, par rapport au moteur
ensembles moto-variateurs sont destins des
asynchrone, bnficie donc dun certain nombre
marchs spcifiques comme ceux des robots ou
de particularits avantageuses en ce qui
des machines-outils pour lesquels un moindre
concerne son alimentation par le rseau
volume des moteurs, les acclrations et la
tension et frquence constantes :
bande passante sont des impratifs.
v la vitesse du moteur est constante, quelle que
soit la charge ;
v il peut fournir de la puissance ractive et
Enroulement permettre damliorer le facteur de puissance
statorique dune installation,
1
12 v il peut supporter sans dcrocher des chutes de
2
N tension relativement importantes (de l'ordre de
11
50 % en raison de ses possibilits de
3 surexcitation).
10 Toutefois, le moteur synchrone aliment
S S
4 directement par le rseau de distribution
d'nergie tension et frquence constantes
9
prsente deux inconvnients :
5 v il a des difficults de dmarrage ; de fait, si le
8 N
Rotor moteur nest pas associ un variateur de
7 6
aimants vitesse, le dmarrage doit seffectuer vide, soit
permanents par dmarrage direct pour les petits moteurs,
(4 ples) soit laide dun moteur de lancement qui
Fig. 10 : Coupe dun moteur aimants permanents. lentrane une vitesse proche du synchronisme
avant le couplage direct sur le rseau,
v il peut dcrocher si le couple rsistant dpasse
v Les autres machines synchrones sont rotor son couple lectromagntique maximal et, dans
bobin, elles sont rversibles et peuvent ce cas, il faut reprendre tout le processus de
fonctionner en gnrateurs (alternateurs) ou en dmarrage.
moteurs. Pendant longtemps ces machines ont
surtout t utilises en alternateurs. Leur usage Autres types de moteurs synchrones
en moteur tait pratiquement confin aux Pour terminer le tour dhorizon des moteurs
applications o il tait ncessaire d'entraner des industriels citons les moteurs linaires, les
charges vitesse fixe en dpit des variations moteurs asynchrones synchroniss et les
relativement importantes de leur couple moteurs pas pas.
rsistant.
c Les moteurs linaires
Le dveloppement des convertisseurs de
Leur structure est identique celle des moteurs
frquence directs (du type cycloconvertisseur)
rotatifs de type synchrone : ils sont composs
ou indirects fonctionnant en commutation
dun stator (plateau) et dun rotor (tige davance)
naturelle grce l'aptitude des machines
dvelopps en ligne. En gnral le plateau se
synchrones fournir de la puissance ractive, a
dplace sur une glissire le long de la tige
permis la ralisation d'entranements lectriques
davance.
vitesse variable performants, fiables et
particulirement comptitifs par rapport aux Ce type de moteur saffranchit de toute
solutions concurrentes lorsque la puissance cinmatique intermdiaire pour la transformation
dpasse le mgawatt. du mouvement do labsence de jeu et dusure
Bien que lon puisse trouver des moteurs mcanique de cet entranement.
synchrones utiliss industriellement dans la c Les moteurs asynchrones synchroniss
gamme de puissance de 150 kW 5 MW, cest Ce sont des moteurs induction. Lors de la
au-del de 5 MW que les entranements phase de dmarrage, le moteur fonctionne en
lectriques utilisant des moteurs synchrones se mode asynchrone et lorsqu'il a atteint une
sont pratiquement imposs, majoritairement vitesse proche du synchronisme, il passe en
associs des variateurs de vitesse. mode synchrone.
Cahier Technique Schneider Electric n 207 / p.11
Si sa charge mcanique est importante, il ne le nombre de pas par tour (cest--dire pour
peut plus tourner en mode synchrone et repasse 360). Les valeurs courantes sont 48, 100 ou
en mode asynchrone. 200 pas par tour.
Cette particularit est obtenue par une La rotation du moteur se fait donc de manire
construction spciale du rotor et en gnral pour discontinue. Pour amliorer la rsolution, ce
des moteurs de faible puissance. nombre de pas peut tre augment de manire
c Les moteurs pas pas purement lectronique (fonctionnement en
Le moteur pas pas est un moteur qui tourne en micropas).
fonction des impulsions lectriques alimentant En faisant varier par chelon le courant
ses bobinages. Selon son alimentation (cf. fig. 12 ) dans les bobines, on cre un champ
lectrique, il peut tre de type : rsultant qui glisse d'un pas un autre, ce qui a
v unipolaire si ses bobinages sont toujours pour rsultat la rduction effective du pas.
aliments dans le mme sens par une tension Les circuits pour micropas multiplient par 500 le
unique, d'o le nom d'unipolaire ; nombre de pas dun moteur qui passe ainsi, par
v bipolaire lorsque ses bobinages sont aliments exemple, de 200 100 000 pas.
tantt dans un sens, tantt dans l'autre sens. Ils L'lectronique permet de piloter la chronologie
crent une fois un ple Nord, une fois un ple de ces impulsions et d'en comptabiliser le
Sud d'o le nom de bipolaire. nombre. Les moteurs pas pas et leur circuit de
Les moteurs pas pas peuvent tre rluctance commande permettent ainsi la rotation d'un axe
variable, aimants ou une combinaison des avec beaucoup de prcision en vitesse et en
deux (cf. fig. 11 ). amplitude.
L'angle de rotation minimal entre deux Leur fonctionnement sapparente donc celui
modifications des impulsions lectriques dun moteur synchrone quand larbre est en
s'appelle un pas. On caractrise un moteur par rotation continue, ce qui correspond des
Type Bipolaire Unipolaire Bipolaire
aimant rductance hybride
permanent variable
Caractristiques 2 phases, 4 fils 4 phases, 8 fils 2 phases, 4 fils
Nombre pas/tour 8 24 12
Etapes de Fonctionnement
Pas 1
Etat intermdiaire
45 15 30
Pas 2
Fig. 11 : Les trois types de moteur pas pas.
Cahier Technique Schneider Electric n 207 / p.12
limites spcifies de frquence, de couple et longueur, commande de vannes, de dispositifs
dinertie de la charge entrane (cf. fig. 13 ). Si optiques ou de mesure, chargement dcharge-
ces limites sont dpasses, le moteur dcroche ment de presses ou de machines outils etc.
ce qui se traduit par larrt du moteur. La simplicit de cette solution la rend
Un positionnement angulaire prcis est possible particulirement conomique (pas de boucle de
sans boucle de mesure. Ces moteurs de retour). Les moteurs pas pas aimants
puissance en gnral en dessous du kW, sont, prsentent galement lavantage dun couple
pour les petits modles aliments en basse larrt en labsence dalimentation. Par contre, la
tension. Industriellement, ces moteurs sont position initiale du mobile doit tre connue et
utiliss pour des applications de positionnement prise en compte par llectronique afin dassurer
telles que rglage de butes pour coupe un pilotage efficace.
B1 I1
B1
0,86
0,5
B2 t
I2
B2
Fig. 12 : Echelons de courant appliqus aux bobines dun moteur pas pas pour rduire son pas.
Couple
Couple Frquence limite de dmarrage
d'arrt
Plage d'acclration
Couple limite de travail
Plage de dmarrage Frquence maximale des pas
Frquence des pas (Hz)
Fig. 13 : Couple maximal en fonction de la frquence du pas.
Cahier Technique Schneider Electric n 207 / p.13
2.3 Moteurs courant continu
Les moteurs courant continu excitation de mme intensit et de sens oppos. Les deux
spare sont encore quelquefois utiliss pour forces crent un couple qui fait tourner l'induit du
l'entranement vitesse variable des machines. moteur (cf. fig. 14 ).
Trs faciles miniaturiser, ils s'imposent dans Lorsque linduit du moteur est aliment sous une
les trs faibles puissances et les faibles tension continue ou redresse U, il produit une
tensions. Ils se prtent galement fort bien, force contre-lectromotrice E dont la valeur est
jusqu' des puissances importantes (plusieurs E = U RI
mgawatts), la variation de vitesse avec des RI reprsente la chute de tension ohmique dans
technologies lectroniques simples et peu l'induit.
onreuses pour des performances leves La force contre-lectromotrice E est lie la
(plage de variation couramment exploite de 1 vitesse et l'excitation par la relation E = k
100). dans laquelle :
Leurs caractristiques permettent galement une v k est une constante propre au moteur,
rgulation prcise du couple, en moteur ou en v , la vitesse angulaire,
gnrateur. Leur vitesse de rotation nominale, v , le flux.
indpendante de la frquence du rseau, est Cette relation montre qu' excitation constante la
aisment adaptable par construction toutes les force contre-lectromotrice E, proportionnelle
applications. , est une image de la vitesse.
Ils sont en revanche moins robustes que les Le couple est li au flux inducteur et au courant
moteurs asynchrones et beaucoup plus chers, dans l'induit par la relation :
tant en cot matriel qu'en maintenance, car ils C=kI
ncessitent un entretien rgulier du collecteur et En rduisant le flux, le couple diminue.
des balais.
Deux mthode permettent de faire crotre la
Constitution vitesse.
Un moteur courant continu est compos des c Soit augmenter la force contre-lectromotrice E,
lments suivants : donc la tension d'alimentation excitation
c L'inducteur ou stator constante : c'est le fonctionnement dit couple
C'est un lment du circuit magntique immobile constant ;
sur lequel un enroulement est bobin afin de c Soit diminuer le flux d'excitation, donc le
produire un champ magntique. L'lectro-aimant courant d'excitation, en maintenant la tension
ainsi ralis comporte une cavit cylindrique d'alimentation constante : c'est le
entre ses ples. fonctionnement dit en rgime dflux ou
c L'induit ou rotor puissance constante . Ce fonctionnement
C'est un cylindre en tles magntiques isoles impose que le couple soit dcroissant avec
entre elles et perpendiculaires l'axe du l'augmentation de vitesse (cf. fig. 15 ). D'autre
cylindre. L'induit est mobile en rotation autour de part, pour des rapports levs de dfluxage ce
son axe et est spar de l'inducteur par un fonctionnement ncessite des moteurs
entrefer. A sa priphrie, des conducteurs sont
rgulirement rpartis.
c Le collecteur et les balais I
Le collecteur est solidaire de l'induit. Balai
Les balais sont fixes, ils frottent sur le collecteur
Ple inducteur Ple inducteur
et ainsi alimentent les conducteurs de l'induit.
Principe de fonctionnement
Lorsque l'inducteur est aliment, il cre un
F
champ magntique (flux dexcitation) dans
l'entrefer, dirig suivant les rayons de l'induit. Ce F
S N
champ magntique rentre dans l'induit du
ct du ple Nord de l'inducteur et sort de
l'induit du ct du ple Sud de l'inducteur.
if if
Quand l'induit est aliment, ses conducteurs
situs sous un mme ple inducteur (d'un mme Balai
ct des balais) sont parcourus par des courants I
de mme sens et sont donc, d'aprs la loi de Fig. 14 : Production dun couple dans un moteur
Laplace, soumis une force. Les conducteurs courant continu.
situs sous l'autre ple sont soumis une force
Cahier Technique Schneider Electric n 207 / p.14
spcialement adapts (mcaniquement et Diffrents types de moteurs courant
lectriquement) pour s'affranchir des problmes continu (cf. fig. 16 )
de commutation. c A excitation parallle (spare ou shunt)
Le fonctionnement d'un tel appareil (moteur Les bobinages, induit et inducteur, sont
courant continu) est rversible : connects en parallle ou aliments par deux
v si la charge soppose au mouvement de sources de tensions diffrentes pour des
rotation (charge dite rsistante), lappareil fournit questions dadaptation aux caractristiques de la
un couple et fonctionne en moteur, machine (ex. : tension dinduit 400 volts et
v si la charge est telle quelle tend faire tourner tension dinducteur 180 volts).
lappareil (charge dite entranante) ou quelle L'inversion du sens de rotation s'obtient par
soppose au ralentissement (phase darrt dune l'inversion de l'un ou de l'autre des
charge prsentant une certaine inertie), lappareil enroulements, en gnral par inversion de la
fournit de l'nergie lectrique et fonctionne en tension d'induit en raison des constantes de
gnratrice. temps beaucoup plus rduites. La majorit des
a : couple constant b : puissance constante
Fonctionnement :
couple puissance
Couple constant constante
Couple
I = Imax
U = -U n
U = - 0,8
U = - 0,6
U = - 0,4
U = 0,2 U n
U = 0,4 U n
U = 0,6 U n
U = 0,8 U n
U = Un
U = - 0,2
Cmax
I = In
Cn
Un
Un
Un
Un
Un ; n
Vitesse
0 Vitesse 0 Nn Nmax
U=0
I = -In
-Cn
I = -Imax
-Cmax
Fig. 15 : Courbes couple/vitesse dun moteur excitation spare.
a : Moteur excitation spare c : Moteur excitation shunt
Alim 1 Alim
M M
Alim 2
b : Moteur excitation srie d : Moteur excitation compose
Alim Alim
M M
Fig. 16 : Schmas des diffrents types de moteurs courant continu.
Cahier Technique Schneider Electric n 207 / p.15
variateurs bidirectionnels pour moteur courant c A excitation srie parallle (compose ou
continu travaillent de la sorte. compound )
c A excitation srie Cette technologie permet de runir les qualits
Ce moteur est de construction semblable celle du moteur excitation srie et du moteur
du moteur excitation spare. Le bobinage excitation parallle.
inducteur est connect en srie avec le Ce moteur comporte deux enroulements par
bobinage induit, d'o son appellation. ple inducteur. L'un est en parallle avec l'induit.
L'inversion du sens de rotation est obtenue Il est parcouru par un faible courant au regard du
indiffremment par inversion des polarits de courant de travail. L'autre est en srie.
l'induit ou de l'inducteur. Ce moteur est Le moteur est flux additif si les ampres-tours
essentiellement utilis en traction, en particulier des deux enroulements ajoutent leurs effets. Il
sur les chariots aliments par batteries est flux soustractif dans le cas contraire, mais
daccumulateurs. En traction ferroviaire les ce mode de montage est trs rarement utilis car
anciennes motrices du TGV utilisaient ce type de il conduit un fonctionnement instable pour les
moteur, les plus rcentes utilisent des moteurs fortes charges.
asynchrones.
Cahier Technique Schneider Electric n 207 / p.16
3 Exploitation des moteurs asynchrones
3.1 Moteurs cage
Consquences dune variation de tension
c Effet sur le courant de dmarrage
Le courant de dmarrage varie avec la tension
Stator Rotor
dalimentation. Si celle-ci est plus leve
pendant la phase de dmarrage, le courant
Inductance Pertes
absorb linstant de la mise sous tension de fuite Joule
augmente. Cette augmentation de courant est
aggrave par la saturation de la machine.
c Effet sur la vitesse Inductance L Pertes Puissance
Lors des variations de tension, la vitesse de de flux fer active
synchronisme nest pas modifie, mais sur un magntique
moteur en charge, une augmentation de la Io
tension entrane une lgre diminution du
glissement. Concrtement, cette proprit est
inexploitable car en raison de la saturation du
circuit magntique du stator, le courant absorb Fig. 17 : Schma quivalent dun moteur asynchrone.
augmente fortement et un chauffement anormal
de la machine est craindre mme sur un
Par consquent, il est possible d'obtenir le
fonctionnement faible charge. En revanche, si
couple et les courants nominaux tant que la
la tension dalimentation dcrot le glissement
tension d'alimentation U peut tre ajuste en
augmente et, pour fournir le couple le courant
fonction de la frquence.
absorb augmente, avec le risque
Quand cet ajustement nest plus possible, la
d'chauffement qui en rsulte. D'autre part,
frquence peut toujours tre augmente, mais le
comme le couple maximum dcrot comme le
courant Io diminue et le couple utile galement
carr de la tension, un dcrochage est possible car il nest pas possible de dpasser de manire
en cas de diminution importante de tension. continue le courant nominal de la machine sans
risque dchauffement.
Consquences d'une variation de frquence
Pour obtenir un fonctionnement couple
c Effet sur le couple
constant quelle que soit la vitesse il faut
Comme dans toute machine lectrique, le couple
maintenir le ratio U/F constant ce que ralise
du moteur asynchrone est de la forme
un convertisseur de frquence.
C=KI c Effet sur la vitesse
(K = cfficient constant dpendant de la La vitesse de rotation d'un moteur asynchrone
machine) est proportionnelle la frquence de la tension
Dans le schma quivalent de la figure 17 , le dalimentation. Cette proprit est souvent
bobinage L est celui qui produit le flux et Io est le utilise pour faire fonctionner trs grande
courant magntisant. vitesse des moteurs spcialement conus, par
En premire approximation, en ngligeant la exemple avec une alimentation en 400 Hz
rsistance devant l'inductance magntisante (rectifieuses, appareils de laboratoire ou
(c'est--dire pour des frquences de quelques chirurgicaux, etc.) Il est aussi possible dobtenir
Hertz) le courant Io a pour expression : une vitesse variable par rglage de la frquence,
par exemple de 6 50 Hz (rouleaux
Io = U / 2 L f
transporteurs, appareils de levage, etc.).
et le flux aura pour expression :
= k Io Rglage de vitesse des moteurs asynchrones
Le couple de la machine a donc pour triphass
expression : (sujet dtaill dans le Cahier Technique n 208)
C = K k Io I Pendant longtemps, les possibilits de rglage
Io et I sont les courants nominaux pour lesquels de la vitesse des moteurs asynchrones ont t
le moteur est dimensionn. des plus rduites. Les moteurs cage taient la
Pour ne pas dpasser les limites il faut maintenir plupart du temps utiliss leur vitesse nominale.
Io sa valeur nominale, ce qui ne peut s'obtenir Pratiquement seuls les moteurs couplage de
que si le rapport U/f reste constant. ples ou enroulements statoriques spars,
Cahier Technique Schneider Electric n 207 / p.17
encore frquemment utiliss de nos jours, dmarrage ralise automatiquement le passage
permettaient de disposer de plusieurs vitesses en petite vitesse avant denclencher la grande
fixes. vitesse ou avant l'arrt.
Avec les convertisseurs de frquence, les
Suivant les courants absorbs lors des
moteurs cage sont aujourd'hui couramment
couplages Petite Vitesse -PV- ou Grande
commands en vitesse variable, et peuvent ainsi
Vitesse -GV-, la protection peut tre ralise par
tre employs dans des applications jusqu'alors
un mme relais thermique pour les deux
rserves aux moteurs courant continu.
vitesses ou par deux relais (un pour chaque
Moteurs couplage de ples vitesse).
Comme nous lavons vu prcdemment, la Gnralement, ces moteurs ont un rendement
vitesse dun moteur cage est fonction de la peu lev et un facteur de puissance assez
frquence du rseau dalimentation et du faible.
nombre de paires de ples. Il est donc possible
dobtenir un moteur deux ou plusieurs vitesses Moteurs enroulements statoriques spars
en crant dans le stator des combinaisons de Ce type de moteurs, comportant deux
bobinages qui correspondent des nombres de enroulements statoriques lectriquement
ples diffrents. indpendants, permet d'obtenir deux vitesses
Ce type de moteur ne permet que des rapports dans un rapport quelconque. Cependant leurs
de vitesses de 1 2 (4 et 8 ples, 6 et 12 ples, caractristiques lectriques sont souvent
etc.). Il comporte six bornes (cf. fig. 18 ). affectes par le fait que les enroulements PV
Pour lune des vitesses, le rseau est connect doivent supporter les contraintes mcaniques et
sur les trois bornes correspondantes. Pour la lectriques rsultant du fonctionnement du
seconde, celles-ci sont relies entre elles, le moteur en GV. Ainsi, de tels moteurs
rseau tant branch sur les trois autres bornes. fonctionnant en PV absorbent parfois un courant
Le plus souvent, aussi bien en grande quen plus important qu'en GV.
petite vitesse, le dmarrage seffectue par Il est galement possible de raliser des
couplage au rseau sans dispositif particulier moteurs trois ou quatre vitesses en procdant
(dmarrage direct). au couplage des ples sur l'un des enroulements
Dans certains cas, si les conditions dexploitation statoriques ou sur les deux. Cette solution exige
lexigent et si le moteur le permet, le dispositif de des prises supplmentaires sur les bobinages.
Couplage Dahlander triangle/toile (pour couple constant)
Petite vitesse Grande vitesse Petite vitesse Grande vitesse
Ph1 Ph1
1U Ph1 Ph2 Ph3
2U
2U 2V 2W 2U 2V 2W
2U 2W
1U 1W
1U 1V 1W 1U 1V 1W
1W 1V 2W 2V
1V Ph1 Ph2 Ph3
Ph3 2V Ph2 Ph3 Ph2
Couplage Dahlander toile/toile-toile (pour couple quadratique)
Petite vitesse Grande vitesse Petite vitesse Grande vitesse
Ph1 Ph1
1U 2U
Ph1 Ph2 Ph3
2U 2U 2V 2W 2U 2V 2W
1U
1W
2V 2W 2W 1V 1U 1V 1W 1U 1V 1W
2V
1W 1V Ph3 Ph2 Ph1 Ph2 Ph3
Ph3 Ph2
Fig. 18 : Diffrents types de couplage Dahlander.
Cahier Technique Schneider Electric n 207 / p.18
3.2 Moteurs bagues
Utilisation de la rsistance rotorique appliqu par la machine sur larbre du moteur
La rsistance rotorique pour ce type de moteur (cf. fig. 19 ). Pour une rsistance donne, le
permet de dfinir : glissement est proportionnel au couple. Ainsi par
v son couple de dmarrage (cf. chap. 1), exemple, la baisse de vitesse obtenue par une
v et sa vitesse. rsistance peut tre de 50 % pleine charge et
25 % seulement demi-charge, alors que la
En effet, le raccordement dune rsistance vitesse vide reste pratiquement inchange.
permanente aux bornes du rotor dun moteur
bagues abaisse sa vitesse, et cela dautant plus Si un conducteur surveille en permanence la
que la rsistance est de valeur leve. Cest une machine, il peut, en modifiant la demande la
solution simple pour faire varier la vitesse. valeur de la rsistance, fixer la vitesse dans une
certaine zone pour les couples relativement
Rglage de vitesse par glissement importants, mais tout rglage est pratiquement
Ces rsistances rotoriques ou de glissement impossible pour les faibles couples. En effet, si
peuvent tre court-circuites en plusieurs crans pour obtenir un point faible vitesse faible
pour obtenir soit un rglage discontinu de la couple , il insre une trs forte rsistance, la
vitesse, soit lacclration progressive et le moindre variation du couple rsistant fait passer
dmarrage complet du moteur. Elles doivent la vitesse de zro prs de 100 %. La
supporter la dure du fonctionnement, surtout caractristique est trop instable.
quand elles sont prvues pour faire varier la
vitesse. De ce fait, leur volume est parfois Pour des machines variation particulire du
important et leur cot lev. couple rsistant en fonction de la vitesse, le
rglage peut savrer galement impossible.
Ce procd extrmement simple est de moins
Exemple de fonctionnement en glissement. Pour
en moins employ car il prsente deux
inconvnients importants : une machine qui applique au moteur un couple
rsistant de 0,8 Cn, il peut tre obtenu des
v pendant la marche vitesse rduite, une
grande partie de lnergie prise au rseau est vitesses diffrentes reprsentes par le signe
dissipe en pure perte dans les rsistances, sur le diagramme de la figure 19.
v la vitesse obtenue nest pas indpendante de A couple gal, la vitesse diminue lorsque la
la charge, mais varie avec le couple rsistant rsistance rotorique augmente.
Zone de
fonctionnement Zone
Vitesse en glissement d'acclration
Courbe naturelle
du moteur
0,75
Courbe avec
rsistance
rotorique faible
0,50
Courbe avec
0,25 rsistance
rotorique
importante
0 0,5 0,8 1 1,5 2 Couple
Fig. 19 : Courbe vitesse/couple avec rsistance de glissement .
Cahier Technique Schneider Electric n 207 / p.19
3.3 Autres systmes de variation de vitesse
Le variateur de tension
Ce dispositif nest utilis que pour des moteurs
asynchrones de petite puissance. Il ncessite un
moteur cage rsistante.
Rotor
La variation de vitesse sobtient en augmentant
le glissement du moteur conscutif la Cloche mtallique Bobine alimente en CC
diminution de tension.
Son utilisation est assez rpandue dans les Moteur Gnratrice
asynchrone tachymtrique
systmes de ventilation, de pompes et de
compresseurs, applications pour lesquelles sa
caractristique du couple disponible permet un
fonctionnement satisfaisant. Les convertisseurs Arbre
de frquence devenant trs comptitifs de sortie
remplacent progressivement cette solution.
Autres systmes lectromcaniques
Les systmes lectromcaniques de rglage de
vitesse, cits ci-aprs pour mmoire, sont dun
emploi moins frquent depuis la gnralisation
des variateurs de vitesse lectroniques.
c Moteurs alternatifs collecteur (Schrage)
Il sagit de moteurs spciaux. La variation de Fig. 20 : Coupe schmatique dun variateur de vitesse
vitesse est obtenue en faisant varier, par rapport courant de Foucault.
la ligne neutre, la position des balais sur le
collecteur.
c Variateurs courant de Foucault
Il se compose dune cloche connecte
directement au moteur asynchrone tournant Rseau lectrique
vitesse constante, et dun rotor comportant un
bobinage aliment par du courant continu
(cf. fig. 20 ).
Moteur CA Gnratrice Moteur CC
Le mouvement est transmis larbre de sortie
par couplage lectromagntique. En ajustant
lexcitation de ce bobinage, il est possible
dajuster le glissement de cet ensemble.
Une gnratrice tachymtrique incorpore
permet de contrler la vitesse avec une bonne Fig. 21 : Schma dun groupe Ward Lonard.
prcision.
Un systme de ventilation permet dvacuer les
pertes dues au glissement. Cette solution de variation de vitesse tait la plus
conomique et la plus performante avant
Ce principe a t largement utilis dans des
lapparition des semi-conducteurs qui la rendu
engins de levage et en particulier les grues de
obsolte.
chantier. Sa constitution en fait un systme
robuste, sans pices dusure et peut convenir Variateurs de vitesse mcaniques et
pour des fonctionnements intermittents et pour hydrauliques
des puissances jusqu une centaine de kW.
Les variateurs mcaniques et hydrauliques sont
c Groupe Ward Lonard toujours utiliss.
Ce dispositif, autrefois trs rpandu, est
constitu dun moteur et dun gnrateur de En ce qui concerne les variateurs mcaniques
courant continu lequel alimente un moteur a de multiples solutions ont t imagines
courant continu (cf. fig. 21 ). (poulies / courroies, billes, cnes ). Ces
variateurs ont pour dsavantage de rclamer
La variation de vitesse sobtient en rglant
une maintenance soigne et se prtent
lexcitation de la gnratrice. Un faible courant
difficilement aux asservissements. Ces
de contrle permet de matriser des puissances
de plusieurs centaines de kW dans tous les variateurs sont fortement concurrencs par les
quadrants couple vitesse. Ce type de variateur a convertisseurs de frquence...
t utilis sur les laminoirs ainsi que sur les Les variateurs hydrauliques sont toujours trs
ascenseurs de mines. rpandus pour des applications particulires.
Cahier Technique Schneider Electric n 207 / p.20
Ils sont caractriss par des puissances industrielles, on les trouvera principalement dans
massiques considrables et la capacit de des applications de servocommande.
dvelopper des couples importants a vitesse Nous ne dtaillerons pas ce type de variateurs
nulle de manire continue. Dans les applications qui n'entre pas dans le cadre de cet ouvrage.
Cahier Technique Schneider Electric n 207 / p.21
4 Conclusion
Le tableau ci-aprs permet de visualiser trs de standard est de nos jours renforc par
rapidement lensemble des moteurs lectriques une parfaite adaptation lemploi conscutive au
disponibles, leurs principales caractristiques et dveloppement des dispositifs lectroniques qui
leurs domaines demploi. autorisent la variation de vitesse.
Il faut souligner la place tenue par les moteurs
asynchrones cage triphass dont le qualificatif
Type de moteur Asynchrone cage Asynchrone Synchrone Pas pas A courant
triphas monophas bague rotor bobin rotor terres continu
rares
Cot du moteur Faible Faible Elev Elev Elev Faible Elev
Moteur tanche Standard Possible Sur demande, Sur demande, Standard Standard Possible
coteux coteux Trs coteux
Dmarrage Ais Ais Dispositif de Impossible Non prvu Non prvu Non prvu
direct sur dmarrage partir de
le rseau particulier quelques kW
Variation de Facile Trs rare Possible Frquent Toujours Toujours Toujours
vitesse
Cot de De plus en Trs Economique Trs Assez Trs Trs
la solution plus conomique conomique conomique conomique conomique
variation de conomique
vitesse
Performance en De plus en Trs faible Moyenne Eleve Trs leve Moyenne Eleve
variation de plus leve leve trs leve
vitesse
Emploi Vitesse En majorit, Vitesse Vitesse Vitesse variable Vitesse Vitesse variable
constante vitesse constante constante variable
ou variable constante ou variable ou variable
Utilisation Universelle Pour les petites En diminution Dans les Machines outils, Positionnement En diminution
industrielle puissances grandes forte dynamique en boucle
puissances en ouverte,
moyenne pour les petites
tension puissances
Cahier Technique Schneider Electric n 207 / p.22
2004 Schneider Electric
Schneider Electric Direction Scientifique et Technique, Ralisation : SEDOC
Service Communication Technique Edition : Schneider Electric
F-38050 Grenoble cedex 9 - 20 -
Tlcopie : 33 (0)4 76 57 98 60
E-mail : fr-tech-com@schneider-electric.com
* Construire le nouveau monde de llectricit 06-04
Vous aimerez peut-être aussi
- Lacan, Fonction Et Champ de La ParoleDocument63 pagesLacan, Fonction Et Champ de La ParoleMiquel Figueras MoreuPas encore d'évaluation
- Aide-Mémoire TuyauterieDocument86 pagesAide-Mémoire Tuyauterielouis666fr75% (4)
- Voyage Aux Confins de La Conscience - Sylvie Déthiollaz & Claude Charles FourrierDocument271 pagesVoyage Aux Confins de La Conscience - Sylvie Déthiollaz & Claude Charles FourrierChri Cha100% (10)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Procedure de Gestion Des Audits InternesDocument5 pagesProcedure de Gestion Des Audits Internesnajim68Pas encore d'évaluation
- Le Grillage Des Concentres de ZincDocument12 pagesLe Grillage Des Concentres de Zincnajim68Pas encore d'évaluation
- Cours AlternateurDocument10 pagesCours Alternateurjeremy54000100% (2)
- Bureau Des MéthodesDocument13 pagesBureau Des MéthodesSafia Lamrani100% (3)
- Fiche de PosteDocument2 pagesFiche de Postenajim68Pas encore d'évaluation
- CT 207Document25 pagesCT 207Youssef JakePas encore d'évaluation
- Principe de Fonctionnement D'un Variateur de Vitesse PDFDocument30 pagesPrincipe de Fonctionnement D'un Variateur de Vitesse PDFChaouki Abdallah86% (7)
- Les Moteurs ElectriquesDocument18 pagesLes Moteurs ElectriquesBeaunel Si-preuvePas encore d'évaluation
- Commande Des SystèmeDocument4 pagesCommande Des SystèmeWill Smith TaherPas encore d'évaluation
- Audit Des Moteurs ElectriquesDocument19 pagesAudit Des Moteurs ElectriquesBeaunel Si-preuvePas encore d'évaluation
- Expose Electronique de PuissanceDocument16 pagesExpose Electronique de PuissanceMoncef BenPas encore d'évaluation
- Principe Moteur Brushless: Réaliser ParDocument17 pagesPrincipe Moteur Brushless: Réaliser ParAhmed Bouafif100% (1)
- Variateurs de VitesseDocument17 pagesVariateurs de VitesseYanis Kemoun50% (2)
- Bienvenue Dans PowerPoint ÉDocument13 pagesBienvenue Dans PowerPoint ÉMoncef BenPas encore d'évaluation
- IntroductionDocument10 pagesIntroductionمہۣۗتہۣۗوآأضہۣۗع مہۣۗتہۣۗوآأضہۣۗعPas encore d'évaluation
- Moteur Pompe PDFDocument182 pagesMoteur Pompe PDFWiem Jmei Mansour0% (1)
- Entraînement À Vitesse VariableDocument14 pagesEntraînement À Vitesse VariableggulsuPas encore d'évaluation
- VariateurDocument22 pagesVariateurahmed23brahmiPas encore d'évaluation
- PRT 219028 GtmoteursDocument66 pagesPRT 219028 GtmoteursHoucin GPas encore d'évaluation
- Comparaison Types de MoteursDocument3 pagesComparaison Types de Moteursserge RinaudoPas encore d'évaluation
- اميرةDocument73 pagesاميرةamira maramPas encore d'évaluation
- Compte Rendu Mas MCC MsDocument24 pagesCompte Rendu Mas MCC MsAbderrazzak TaPas encore d'évaluation
- Introduction:: - Dans La Rubrique Machines ÉlectriquesDocument10 pagesIntroduction:: - Dans La Rubrique Machines ÉlectriquesGhiles GamerPas encore d'évaluation
- Machines Asynchrones - Choix Et Problèmes ConnexesDocument27 pagesMachines Asynchrones - Choix Et Problèmes ConnexesMouhsineAtb50% (2)
- Commande Des Actionneurs Electriques 7Document24 pagesCommande Des Actionneurs Electriques 7Elghazouani YounessPas encore d'évaluation
- MemoireDocument12 pagesMemoirewassimbabouche46Pas encore d'évaluation
- TP 1Document11 pagesTP 1oussamalaarbi142Pas encore d'évaluation
- ActionneursDocument6 pagesActionneursMERYEM ZOUBIRPas encore d'évaluation
- Fiches Projets Et Modéles de CPS - Efficacité EnergétiqueDocument64 pagesFiches Projets Et Modéles de CPS - Efficacité EnergétiqueMohamed CIPas encore d'évaluation
- FR Technical Guide No 1 REVC PDFDocument36 pagesFR Technical Guide No 1 REVC PDFDerrouch AbderrahmanePas encore d'évaluation
- Variation de Vitesses Appli Industrielles PDFDocument7 pagesVariation de Vitesses Appli Industrielles PDFLarry FlowersPas encore d'évaluation
- Poster Template Pour LicenceDocument1 pagePoster Template Pour LicenceSidahmed LarbaouiPas encore d'évaluation
- Banc D'essaiDocument25 pagesBanc D'essaiaysonsanonymosPas encore d'évaluation
- SurveillanceDocument41 pagesSurveillanceBoukhrisse HamzaPas encore d'évaluation
- (CElm) (CO) Conversion ElectromecaniqueDocument24 pages(CElm) (CO) Conversion ElectromecaniqueSirineJamoussiPas encore d'évaluation
- Chapitre I Entra Nements Electriques A Vitesse Variable-1Document8 pagesChapitre I Entra Nements Electriques A Vitesse Variable-1Mahmoud SettouPas encore d'évaluation
- Chapitre-1 2 3 CME L3 ELTDocument67 pagesChapitre-1 2 3 CME L3 ELTnadjib100% (1)
- SOMMAIREDocument8 pagesSOMMAIREhot manPas encore d'évaluation
- Moteur Électrique - Docx FinaleDocument2 pagesMoteur Électrique - Docx FinaleMolka ZayaniPas encore d'évaluation
- FR Ti Dc-MotorsDocument22 pagesFR Ti Dc-Motorsp tur elecPas encore d'évaluation
- Manuel TP 1Document47 pagesManuel TP 1Mohamed Amine Zouhri100% (3)
- Variateurs de Vitesse 201106Document17 pagesVariateurs de Vitesse 201106Bhl ZarroukPas encore d'évaluation
- Demarage Protection Moteurs Haute TensionDocument28 pagesDemarage Protection Moteurs Haute TensionYounes KerchaouiPas encore d'évaluation
- INTODUCTIONDocument1 pageINTODUCTIONlamia lamiaPas encore d'évaluation
- Présentation Analyse 2 MoteursDocument23 pagesPrésentation Analyse 2 Moteurszeguerrou.ilyas.28Pas encore d'évaluation
- Présentation Analyse 2 MoteursDocument23 pagesPrésentation Analyse 2 Moteurskhaled kamel BouabdallahPas encore d'évaluation
- 802 Variateurs ContinuDocument5 pages802 Variateurs ContinuAndy KafwimbiPas encore d'évaluation
- GnkincteDocument20 pagesGnkinctesalahouchenesalahPas encore d'évaluation
- Etude Moteur Synchrone Asynchrone PDFDocument13 pagesEtude Moteur Synchrone Asynchrone PDFRamiAttiaPas encore d'évaluation
- Commande Des Machines Electriques: 3éme Année Licence ElectrotechniqueDocument60 pagesCommande Des Machines Electriques: 3éme Année Licence ElectrotechniqueIMAD ABOUDRARPas encore d'évaluation
- Chapitre II-Généralités Sur Les Démarreurs Et Les Variateurs de VitesseDocument18 pagesChapitre II-Généralités Sur Les Démarreurs Et Les Variateurs de VitesseMehdi Yahi100% (1)
- Livre - Blanc - Efficacite Energetique Des Machines Le Choix Judicieux de La MotorisationDocument17 pagesLivre - Blanc - Efficacite Energetique Des Machines Le Choix Judicieux de La MotorisationLoic NoelPas encore d'évaluation
- Les Moteurs ÉlectriquesDocument14 pagesLes Moteurs Électriquesisaac yamien ebiniPas encore d'évaluation
- Chapitre 3 - Stratégies de Contrôle Et de Commande Des Machines Asynchrones - 2018 - 2019 - Commande ScalaireDocument9 pagesChapitre 3 - Stratégies de Contrôle Et de Commande Des Machines Asynchrones - 2018 - 2019 - Commande ScalaireAli MEDJGHOUPas encore d'évaluation
- Avant-Propos: Le Moteur Est Le Cœur D'une Chaîne ÉlectromécaniqueDocument17 pagesAvant-Propos: Le Moteur Est Le Cœur D'une Chaîne ÉlectromécaniqueDaniel TOMBEPas encore d'évaluation
- TP 4 - Variateur de VitesseDocument8 pagesTP 4 - Variateur de VitesseLayla AgamanPas encore d'évaluation
- Document Variateur de VitesseDocument10 pagesDocument Variateur de VitesseMohamed FETTAHPas encore d'évaluation
- 5chapitre 2Document8 pages5chapitre 2Mohamed Yacine RachediPas encore d'évaluation
- CHAP I Cours Commande Des Machines ARTI2 Sept 21Document29 pagesCHAP I Cours Commande Des Machines ARTI2 Sept 21Nourelhouda NciriPas encore d'évaluation
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Photovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVD'EverandPhotovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVPas encore d'évaluation
- Aide-mémoire de mécanique pratique: A l'usage des officiers d'artillerie et des ingénieurs civils et militairesD'EverandAide-mémoire de mécanique pratique: A l'usage des officiers d'artillerie et des ingénieurs civils et militairesPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #1D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #1Pas encore d'évaluation
- Projet Analyse FonctionnelleDocument102 pagesProjet Analyse Fonctionnellewatsop100% (1)
- Le Magnetisme Dans Un Moteur ElectriqueDocument8 pagesLe Magnetisme Dans Un Moteur Electriquenajim68Pas encore d'évaluation
- Maintenance Des Installations HydrauliquesDocument36 pagesMaintenance Des Installations Hydrauliquesnajim68Pas encore d'évaluation
- Doseuse PondéraleDocument8 pagesDoseuse Pondéralenajim68Pas encore d'évaluation
- Le Surgreffage de La VigneDocument14 pagesLe Surgreffage de La Vignenajim68Pas encore d'évaluation
- FT6-Remplacement ChaudiereDocument3 pagesFT6-Remplacement Chaudierenajim68Pas encore d'évaluation
- Lois de La ThermodynamiqueDocument12 pagesLois de La Thermodynamiquenajim68Pas encore d'évaluation
- Principes de ThermodynamiqueDocument15 pagesPrincipes de Thermodynamiquenajim68100% (1)
- Greffe Des AgrumesDocument27 pagesGreffe Des Agrumesnajim68Pas encore d'évaluation
- Fiche de PosteDocument2 pagesFiche de Postenajim68Pas encore d'évaluation
- La GreffeDocument15 pagesLa Greffenajim68100% (1)
- Bouture Du FiguierDocument13 pagesBouture Du Figuiernajim68Pas encore d'évaluation
- MecaniqueDocument27 pagesMecaniqueRamzi MansouriPas encore d'évaluation
- Resume Abaque Smith PDFDocument14 pagesResume Abaque Smith PDFZH HamzaPas encore d'évaluation
- Anonyme - La Cassette Du Petit PaysanDocument9 pagesAnonyme - La Cassette Du Petit PaysanAlainPas encore d'évaluation
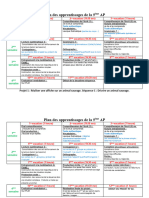
- Plan Des Apprentissages de La 5ème APDocument3 pagesPlan Des Apprentissages de La 5ème APMohand Iddir CherefPas encore d'évaluation
- Elaborer Un Cours de FLEDocument8 pagesElaborer Un Cours de FLEMarijaDomovićPas encore d'évaluation
- Les Verbes Et Leurs Prepositions PDFDocument113 pagesLes Verbes Et Leurs Prepositions PDFRafał Wójcik100% (3)
- 49 MouvementsDocument7 pages49 MouvementsmobotoPas encore d'évaluation
- A.C. Kouamé - Initiation À La SémiostylistiqueDocument17 pagesA.C. Kouamé - Initiation À La SémiostylistiqueZiz PhilztryPas encore d'évaluation
- Mala HoraDocument21 pagesMala HoraMiraPas encore d'évaluation
- Biographie de Yogi BHAJANDocument2 pagesBiographie de Yogi BHAJANMagnim Désiré KadouaPas encore d'évaluation
- Pour Resister A La RegressionDocument29 pagesPour Resister A La RegressionChristophe Solioz100% (3)
- Exercices Les Mots Interrogatifs PDFDocument6 pagesExercices Les Mots Interrogatifs PDFMárcio SantosPas encore d'évaluation
- Ecole de VienneDocument52 pagesEcole de VienneNicole BrooksPas encore d'évaluation
- A1 4 - FLG - Pronoms en y - Fiche EnseignantDocument7 pagesA1 4 - FLG - Pronoms en y - Fiche EnseignantAlexandre LPas encore d'évaluation
- La Fondation AlFurqanDocument4 pagesLa Fondation AlFurqanAnonymous Fb0NsRPPas encore d'évaluation
- Thème IDocument3 pagesThème IDumitrita CuliucPas encore d'évaluation
- Céline - Mea CulpaDocument34 pagesCéline - Mea CulpaWladimir Shroomskaiev100% (6)
- Identite Numerique Et EducationDocument211 pagesIdentite Numerique Et EducationCDISugerPas encore d'évaluation
- 1839 Em24102015 PDFDocument23 pages1839 Em24102015 PDFelmoudjahid_dzPas encore d'évaluation
- Cours D Instruction D Un Sourd Muet de NDocument565 pagesCours D Instruction D Un Sourd Muet de NthatypradoPas encore d'évaluation
- Activite Racine Carree 3Document3 pagesActivite Racine Carree 3skarnskaPas encore d'évaluation
- Guide Redaction Mémoire MasterDocument17 pagesGuide Redaction Mémoire MasterTuyishime Irvin100% (1)
- Rapport de Stage CRIDocument21 pagesRapport de Stage CRILaâchach El Hassan67% (3)
- Seance 7 PM 10juil Le Comportement de GroupeDocument58 pagesSeance 7 PM 10juil Le Comportement de GroupeNdeye Yacka DioufPas encore d'évaluation
- L'homme AntenneDocument2 pagesL'homme AntenneJérémiPerreaultPas encore d'évaluation
- 7169 10 Demarches PedagogiquesDocument52 pages7169 10 Demarches PedagogiquesUdei DonPas encore d'évaluation
- Le Plan de Communication Definir Et Organiser Votre Strategie de Communication de Thierry Libaert, Paris, Dunod, ReviewDocument3 pagesLe Plan de Communication Definir Et Organiser Votre Strategie de Communication de Thierry Libaert, Paris, Dunod, Reviewaguilarjovi50% (2)
- Management Participatif Des Projets Sociaux FinDocument16 pagesManagement Participatif Des Projets Sociaux FinSef100% (1)
- IntroductionDocument42 pagesIntroductionjamalPas encore d'évaluation