Vous aimerez peut-être aussi
- Porte de Garage CorrigéDocument1 pagePorte de Garage CorrigéakouPas encore d'évaluation
- Corrigé TD 22 - Comportement Statique Des SystèmesDocument2 pagesCorrigé TD 22 - Comportement Statique Des Systèmesbhs channel100% (1)
- Corrigé TD 21 - Comportement Statique Des SystèmesDocument7 pagesCorrigé TD 21 - Comportement Statique Des Systèmesbhs channel100% (1)
- TD Statique CinématiqueDocument5 pagesTD Statique CinématiqueAhmed fattoumPas encore d'évaluation
- TD 13 - Comportement Cinématique Des SystèmesDocument9 pagesTD 13 - Comportement Cinématique Des Systèmesbhs channelPas encore d'évaluation
- Exo2 - Composition Des MouvementsDocument6 pagesExo2 - Composition Des MouvementsToufikJalalEddinePas encore d'évaluation
- Cours Thermique Bâtiment - SougaDocument41 pagesCours Thermique Bâtiment - SougaCsouga93% (14)
- Feuille Exercices Electrotechnique TDDocument15 pagesFeuille Exercices Electrotechnique TDboureda87% (103)
- Acoustique 2 ExercicesDocument2 pagesAcoustique 2 ExercicesSafae Sabir100% (1)
- Notice de Montage Et de Réglage ATV 3 SHDocument34 pagesNotice de Montage Et de Réglage ATV 3 SHAlexandre ThorelPas encore d'évaluation
- TDDocument6 pagesTDYassir Ez-znafryPas encore d'évaluation
- TD 16 - Liaisons - Schéma CinématiqueDocument4 pagesTD 16 - Liaisons - Schéma Cinématiquebhs channelPas encore d'évaluation
- TD 10 - Comportement Cinématique Des SystèmesDocument4 pagesTD 10 - Comportement Cinématique Des Systèmesbhs channelPas encore d'évaluation
- TD 18 - Loi Entrée-Sortie Par Fermeture GéométriqueDocument4 pagesTD 18 - Loi Entrée-Sortie Par Fermeture GéométriqueJawad Hamriti100% (1)
- 32 Fermeture Geo ExercicesDocument4 pages32 Fermeture Geo Exerciceslaalai faicelPas encore d'évaluation
- DS2 PDFDocument8 pagesDS2 PDFAbdelilah Elmesbahi100% (1)
- TD 09 - Cinématique Analytique - Dérivation VectorielleDocument3 pagesTD 09 - Cinématique Analytique - Dérivation VectoriellemoulyPas encore d'évaluation
- Cinematique GraphiqueDocument5 pagesCinematique GraphiqueRey divino MoukouaPas encore d'évaluation
- TD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDocument4 pagesTD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDrisse Achar60% (5)
- Réducteur À Arbre CreuxDocument10 pagesRéducteur À Arbre CreuxBouker Mohamed100% (1)
- S623.2 Comportement Des MecanismesDocument3 pagesS623.2 Comportement Des MecanismesGhada Mouedhen100% (2)
- Corrigé Exercice 1:: Manège Spin FlyDocument8 pagesCorrigé Exercice 1:: Manège Spin FlyFiras HamidPas encore d'évaluation
- TD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesDocument4 pagesTD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesZarroui Abdellah0% (1)
- TD 23 - Comportement Statique Des Systèmes DarorDocument9 pagesTD 23 - Comportement Statique Des Systèmes Darorbhs channelPas encore d'évaluation
- TD Cinematique CHARIOT FILOGUIDE PDFDocument4 pagesTD Cinematique CHARIOT FILOGUIDE PDFanassPas encore d'évaluation
- Max PIDDocument19 pagesMax PIDmarinmikaelPas encore d'évaluation
- TorseurDocument46 pagesTorseurnooneoveronePas encore d'évaluation
- TD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationDocument6 pagesTD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationMönsîeur Abd NourPas encore d'évaluation
- (RDM) (CO) Resistance Des Materiaux PDFDocument30 pages(RDM) (CO) Resistance Des Materiaux PDFZoro LeadPas encore d'évaluation
- TD 8Document4 pagesTD 8Niane Møùstãphà BãssîrôūPas encore d'évaluation
- Chap3 Hyperstatisme Et Mobilité Des MécanismesDocument21 pagesChap3 Hyperstatisme Et Mobilité Des Mécanismesmamadou diopPas encore d'évaluation
- Mecanismes PDFDocument34 pagesMecanismes PDFesloch50% (2)
- TD Exercices SimplesDocument2 pagesTD Exercices SimplesSalah benhsPas encore d'évaluation
- Chapitre 5 Caracteristiques Inertie Des SolidesDocument21 pagesChapitre 5 Caracteristiques Inertie Des Solidesjoe100% (1)
- Guidage en Translation PDFDocument10 pagesGuidage en Translation PDFAzerty DelegfrPas encore d'évaluation
- Corrigé TD 10 - Comportement Cinématique Des SystèmesDocument5 pagesCorrigé TD 10 - Comportement Cinématique Des Systèmesbhs channelPas encore d'évaluation
- TD 3 StatiqueDocument18 pagesTD 3 Statiquefoufoua100% (1)
- Ex Tors - WatermarkDocument71 pagesEx Tors - WatermarkMADJIMBAYE DJASRAPas encore d'évaluation
- Statique Du SolideDocument55 pagesStatique Du SolideZiko100% (1)
- Sujets de Méca Géné 2009Document110 pagesSujets de Méca Géné 2009souheil_sou100% (4)
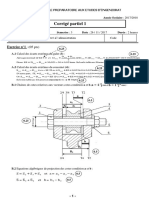
- Corrigé Partiel 1-2018Document4 pagesCorrigé Partiel 1-2018Ramdane BoulahiaPas encore d'évaluation
- PTSI - Cours Liaison HelicoidaleDocument10 pagesPTSI - Cours Liaison HelicoidaleDhibMohamedPas encore d'évaluation
- CI06 TD15 Corrigé - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - ÉquilibreDocument12 pagesCI06 TD15 Corrigé - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - ÉquilibreKhaled Jberi100% (1)
- Corrigé de L'examen de SynthèseDocument2 pagesCorrigé de L'examen de SynthèseMESSAOUI100% (3)
- Efforts Engrenages Denture DroiteDocument2 pagesEfforts Engrenages Denture DroiteŘãnîa SmidaPas encore d'évaluation
- TD1 Mec Ana 2020 ÉnoncéDocument3 pagesTD1 Mec Ana 2020 ÉnoncéMeddour WassimPas encore d'évaluation
- Corrigé Exemples Application Ch3 PDFDocument17 pagesCorrigé Exemples Application Ch3 PDFDjo DjaPas encore d'évaluation
- TD 3 CinemaTiqueDocument15 pagesTD 3 CinemaTiqueMohamed OuladPas encore d'évaluation
- TD20 Correction PDFDocument3 pagesTD20 Correction PDFPapa Gning100% (1)
- Theorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteDocument8 pagesTheorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteothmanePas encore d'évaluation
- Ex 15 16Document18 pagesEx 15 16Sd instruPas encore d'évaluation
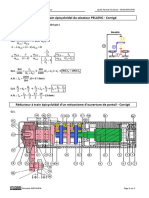
- Mécanisme D'ouverture Automatique D'une Trappe de DésenfumageDocument2 pagesMécanisme D'ouverture Automatique D'une Trappe de DésenfumageSoulaiman Andahmou0% (1)
- Équilibrage DynamiqueDocument1 pageÉquilibrage Dynamiqueabibeh1001Pas encore d'évaluation
- Si MP 2022Document16 pagesSi MP 2022NguyenPas encore d'évaluation
- (Mam) (TD) Modelisation Des Actions MecaniquesDocument2 pages(Mam) (TD) Modelisation Des Actions MecaniquesMATOUMBA PAULIN100% (1)
- (Cin) (TD) Centrifugeuse HumaineDocument5 pages(Cin) (TD) Centrifugeuse HumaineElbatouri Badr EddinePas encore d'évaluation
- TD 20 - Lois Entrée-Sortie en Position Et en VitesseDocument10 pagesTD 20 - Lois Entrée-Sortie en Position Et en Vitessebhs channelPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- TD Statique CinématiqueDocument5 pagesTD Statique CinématiqueNour Allah tabibPas encore d'évaluation
- Examen+Corrigé Phys 1 - 1ère Année ST - 07-08 PDFDocument4 pagesExamen+Corrigé Phys 1 - 1ère Année ST - 07-08 PDFRai newPas encore d'évaluation
- Série 2 - ADocument18 pagesSérie 2 - Aessadikine anassPas encore d'évaluation
- Chap 5 - 6 Chauffage ÉlectriqueDocument11 pagesChap 5 - 6 Chauffage ÉlectriqueSafae Sabir100% (1)
- Chap 6Document1 pageChap 6Safae SabirPas encore d'évaluation
- Solairemcad002 ExDocument20 pagesSolairemcad002 ExSafae SabirPas encore d'évaluation
- Chap 7Document16 pagesChap 7Safae SabirPas encore d'évaluation
- Cisaillement Simple PDFDocument14 pagesCisaillement Simple PDFSafae SabirPas encore d'évaluation
- Qualité D'airDocument29 pagesQualité D'airSafae SabirPas encore d'évaluation
- Chap 1Document8 pagesChap 1Safae SabirPas encore d'évaluation
- Les Besoins de L'occupantDocument13 pagesLes Besoins de L'occupantSafae SabirPas encore d'évaluation
- AerationDocument15 pagesAerationSafae SabirPas encore d'évaluation
- Cours Gisemnt SolaireDocument38 pagesCours Gisemnt SolaireSafae Sabir0% (1)
- Planing Des Exposés Thermique Des BâtimentsDocument7 pagesPlaning Des Exposés Thermique Des BâtimentsSafae SabirPas encore d'évaluation
- Resistance Des MateriauxDocument160 pagesResistance Des MateriauxNourdine Zoubiri83% (6)
- Solairemcad002 Ex PDFDocument2 pagesSolairemcad002 Ex PDFSafae SabirPas encore d'évaluation
- PVDocument14 pagesPVSafae Sabir100% (1)
- Exercice Solairemcad002Document2 pagesExercice Solairemcad002Safae SabirPas encore d'évaluation
- 1 Ademe Iaa RennesDocument35 pages1 Ademe Iaa RennesSafae SabirPas encore d'évaluation
- Deformations PlanesDocument7 pagesDeformations PlaneshassankchPas encore d'évaluation
- Trip SDocument7 pagesTrip SSafae SabirPas encore d'évaluation
- DL 001051 04 05.01.00Document20 pagesDL 001051 04 05.01.00Safae SabirPas encore d'évaluation
- System TriphaséDocument1 pageSystem TriphaséSaad Shield SidoxPas encore d'évaluation
- Air HumideDocument18 pagesAir HumideelwthermPas encore d'évaluation
- Exercices Transformateur Monophasé-1Document1 pageExercices Transformateur Monophasé-1Safae Sabir100% (3)
- 4-Electrotech C2 2015Document2 pages4-Electrotech C2 2015Safae SabirPas encore d'évaluation
- PFEDocument34 pagesPFESafae Sabir100% (1)
- 247e2e03 PDFDocument6 pages247e2e03 PDFSafae SabirPas encore d'évaluation
- Thermo Td6 2005Document2 pagesThermo Td6 2005Safae SabirPas encore d'évaluation
- Exercices Ondes Sonores PDFDocument2 pagesExercices Ondes Sonores PDFSafae SabirPas encore d'évaluation
- Suivi Et ÉvaluationDocument45 pagesSuivi Et ÉvaluationHassène Ben SalahPas encore d'évaluation
- Guide Des Technologies Denrochement de DCN Et de Pose de Gabions - 12 4 2016 PDFDocument29 pagesGuide Des Technologies Denrochement de DCN Et de Pose de Gabions - 12 4 2016 PDFagbokannou spéro100% (2)
- TD 4Document2 pagesTD 4Fatis QueenPas encore d'évaluation
- Gabarits Principes FondamenteauxDocument14 pagesGabarits Principes FondamenteauxCan AydoğmuşPas encore d'évaluation
- LA Metro - 711Document4 pagesLA Metro - 711cartographicaPas encore d'évaluation
- La Lumiere Et Sa PropagationDocument9 pagesLa Lumiere Et Sa Propagationraslenbouallegue12345Pas encore d'évaluation
- Sur La Limite D'une Composition de Deux FonctionsDocument2 pagesSur La Limite D'une Composition de Deux FonctionsWarda Jory100% (1)
- Uc500e FRDocument2 pagesUc500e FRmed100% (1)
- Construire Tableau de SpécificationDocument5 pagesConstruire Tableau de SpécificationMbarek OmarPas encore d'évaluation
- TS Cours SuitesDocument10 pagesTS Cours SuitesGerardo GeusaPas encore d'évaluation
- Description Process de TransformationDocument24 pagesDescription Process de TransformationJean Jaures Anicet Kablan100% (1)
- Sujet À Imprimer Optimisation ENSA BERCHIDDocument11 pagesSujet À Imprimer Optimisation ENSA BERCHIDYounes OuadoudPas encore d'évaluation
- Chapitre 7 AOP Cour d'ELADocument13 pagesChapitre 7 AOP Cour d'ELAIkillilou Tabe ZakariPas encore d'évaluation
- Ma - Cuisine - 2 - 500 - Recettes - (... ) Escoffier - Auguste - bpt6k1265511c (Glissé (E) S) 3Document10 pagesMa - Cuisine - 2 - 500 - Recettes - (... ) Escoffier - Auguste - bpt6k1265511c (Glissé (E) S) 3lucasPas encore d'évaluation
- Guide GESIP 2008 01 EDD - Rev 2019 - Version Du 19 Juillet 2019 BSERRDocument118 pagesGuide GESIP 2008 01 EDD - Rev 2019 - Version Du 19 Juillet 2019 BSERRKais Messaoudi100% (1)
- Boite de Vitesses Robotisee Sensodrive de c3Document5 pagesBoite de Vitesses Robotisee Sensodrive de c3aymendabPas encore d'évaluation
- CV 1Document1 pageCV 1Asmaâ ZaâraouiPas encore d'évaluation
- Electronique Et Loisirs 054 - 2003 - NovembreDocument80 pagesElectronique Et Loisirs 054 - 2003 - NovembreIkram Ikram100% (1)
- Eurocode 2Document5 pagesEurocode 2Sylvain AbissiPas encore d'évaluation
- Adaptation BiodynDocument92 pagesAdaptation BiodynAurélien DRICOTPas encore d'évaluation
- Construire Un Projet de Recherche en Sciences Humaines Et Sociales - Une Procédure de Mise en Lien (Grinschpoun, Marie-France (Grinschpoun Etc.) (Z-Library)Document60 pagesConstruire Un Projet de Recherche en Sciences Humaines Et Sociales - Une Procédure de Mise en Lien (Grinschpoun, Marie-France (Grinschpoun Etc.) (Z-Library)Dieudonné Faraja Chris MkangyaPas encore d'évaluation
- 2-Electrophysiologie CardiaqueDocument8 pages2-Electrophysiologie CardiaqueImene BenzianePas encore d'évaluation
- Introduction A L-Electronique AnalogiqueDocument258 pagesIntroduction A L-Electronique AnalogiqueHajar Berrada89% (9)
- 2 Chapitre1Document5 pages2 Chapitre1Mouad AliouaPas encore d'évaluation
- Corrigé de La Série TD1Document6 pagesCorrigé de La Série TD1Eni CayPas encore d'évaluation
- Plan Marketing StratégiqueDocument276 pagesPlan Marketing StratégiqueR100% (1)
- Tele 7 Jeux - Octobre 2018 PDFDocument100 pagesTele 7 Jeux - Octobre 2018 PDFfanny de los angeles martinez caleroPas encore d'évaluation
- MEC6215 - FRE - 04-02 - Instructions À Propos Des Rapports-1Document16 pagesMEC6215 - FRE - 04-02 - Instructions À Propos Des Rapports-1Exion GroupPas encore d'évaluation
- Bulletin 021 07Document3 pagesBulletin 021 07Walid NessabPas encore d'évaluation