Cours 13 - Champs des Vecteurs Vitesse des Points d’un Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
Champs des Vecteurs Vitesse des Points d’un Solide
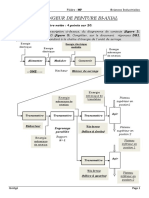
Exemple de Système Mécanique
y
MICROMOTEUR
y
Système réel Modèle
C S0
S3 B
S3
S1 S0
S2
x S2
S0 O
z
S1 A x
z
Un solide indéformable est un ensemble de points matériels dont on peut calculer, pour
chacun, la vitesse et l’accélération en appliquant le calcul direct. Toutefois la cinématique d’un
solide en mouvement possède des particularités qui permettent une étude simplifiée du
mouvement global sans avoir à étudier chaque point individuellement. L’objectif de ce cours
est de mettre en évidence ces particularités.
1 - DEFINITION
y1 y
On associe au bâti 0 le repère
R0(O, x , y , z ) et on associe au 3
vilebrequin 1 le repère
B
R1(O, x1 , y1 , z1 ). 1 2
A
0
On s’intéresse ici au mouvement
de rotation du vilebrequin 1
x
autour de l’axe (O, x ) par rapport z
au bâti 0. z1 θ1 = ( y , y 1 ) = ( z , z1 ).
Pour 2 points A et B quelconques appartenant au solide 1 supposé indéformable, on montre
que : VA 1 / R VB 1 / R AB 1 / R .
Démonstration
En utilisant la formule de dérivation vectorielle pour le vecteur AB , on a :
d d
AB AB R1 / R AB
dt R dt R1
Or les point A et B étant liés au solide 1, le vecteur AB est invariant par rapport à R1. Sa dérivée
d
temporelle dans le repère R1 est donc nulle : AB 0 .
dt R1
Florestan MATHURIN Page 1 sur 8
Cours 13 - Champs des Vecteurs Vitesse des Points d’un Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
En utilisant la relation de Chasles on obtient :
d
dt
d
d
AO OB OB OA R1 / R AB
dt dt
R R R
d d
Or par définition : V(A / R) OA et V(B / R) OB
dt R dt R
On obtient donc : V(A / R) V(B / R) AB R1 / R
R1 / R 1 / R pour un solide indéformable (équivalence repère/solide) et si les points A et B
ont une réalité physique sur le solide 1 alors V(A / R) VA1 / R et V(B / R) VB1 / R ce qui permet
de retrouver l’expression VA 1 / R VB 1 / R AB 1 / R
En généralisant on retiendra que pour 2 points A et B quelconques appartenant à un même
un solide indéformable S, on a : VA S / R VB S / R AB S / R
Attention il faut bien maitriser la notion d’appartenance d’un point à un
solide ! Pour cela il faut être vigilant aux notions d’appartenance
(1)
cinématique, de point géométrique, de point lié et de point coïncidant !!!
Il en existe un
ème
2 qui sera
présenté aussi dans Petit moyen mnémotechnique(1) pour la relation VA S / R VB S / R AB S / R :
ce cours. A vous
ensuite de trouver
Il est indispensable de ne pas faire d’erreur sur cette relation. Pour la retenir on peut utiliser le
celui qui vous moyen mnémotechnique suivant :
conviendra le
mieux !
VA S /R VB S / R AB S / R
Dans le 3ème terme de la relation, on retrouve :
En 1ère position le point apparu en 1ère position dans le début de la relation.
En 2ème position le point apparu en 2ème position dans le début de la relation.
En 3ème position ne peut alors se trouver que le vecteur S / R .
(2)
il est notamment Compte tenu des propriétés du produit vectoriel(2), on peut également écrire pour tout point E
anticommutatif !
et D S la relation sous cette forme : VD S / R VE S / R S / R ED mais le moyen
mnémotechnique précédent n’est plus valable …
Attention de ne jamais confondre le champ des vecteurs vitesse des points d’un solide avec le
champ des vecteurs accélération des points d’un solide qui s’écrit :
d
A S / R B S / R S / R AB S / R AB S / R
dt 0
De toute façon, il est inutile de s’encombrer avec cette relation puisqu’elle ne s’utilise jamais …
2 - MOUVEMENTS ELEMENTAIRES
Pour aborder une étude cinématique, on s’intéresse systématiquement à la nature des
on les appelle aussi mouvements(3)présents dans le système. Par conséquent bien connaitre les mouvements
(3)
mouvements simples élémentaires permet de bien comprendre les cinématiques des systèmes mais cela est aussi
très utile pour appréhender les champs des vecteurs vitesse d’un solide.
Florestan MATHURIN Page 2 sur 8
Cours 13 - Champs des Vecteurs Vitesse des Points d’un Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
2.1. Mouvement de rotation autour d’un axe fixe
Dans le cas d’un mouvement de rotation autour d’un axe fixe d’un solide S par rapport à un
repère R, il existe au moins deux points du solide S qui restent fixes dans le mouvement par
rapport à R. Ces deux points caractérisent l’axe de rotation Δ de S/R. L’axe Δ est l’axe
instantané de rotation de S/R.
Exemple : le vilebrequin 1 du moteur est en mouvement de rotation autour d’un axe fixe par
rapport au solide 0.
L’axe instantané de rotation du
vilebrequin 1 par rapport au
bâti 0 est l’axe (O, x ).
1
Par conséquent tous les points
0
P de l’axe (O, x ) restent fixes
O x au cours du mouvement :
P (O, x) → VP S / R 0
Visualisation expérimentale du champ de vecteur vitesse du vilebrequin (amplifié 10x sur la figure) par analyse
d'images obtenues d’une caméra rapide (600000 images par secondes) grâce à une technique de corrélation
d'images.
Une liaison pivot permet d’obtenir ce mouvement.
Le champ des vitesses s’écrit ici pour tout point A du vilebrequin : VA S / R AO S / R .
Les trajectoires de tous les points du vilebrequin sont des cercles centrés sur l’axe Δ.
Dans de très nombreux cas, un solide peut suivre un Position (t)
mouvement de rotation uniforme ou un mouvement de
rotation uniformément varié.
t
Exemple d’une loi de mouvement en trapèze de vitesse. Vitesse (t)
0
Phase II
Phase II : mouvement uniforme : la vitesse est la même au Phase III
cours du mouvement. Graphiquement, on observe une Phase I
fonction constante (segment de droite horizontal). t
Accélération (t)
Phase I et Phase III : mouvement uniformément varié :
l’accélération est la même au cours du mouvement. t
Graphiquement, on observe une portion de droite
(segment de droite incliné)
Florestan MATHURIN Page 3 sur 8
Cours 13 - Champs des Vecteurs Vitesse des Points d’un Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
2.2. Mouvements de translation y
Dans le cas d’un mouvement de translation d’un solide S
par rapport à un repère R, le solide ne change pas
d’orientation par rapport à R. La position de S/R est
définie par un paramètre dimensionnel (exemple λ) D
variable au cours du temps.
0 A B
Dans le cas du moteur on constate que le piston 3 du
3
moteur est en mouvement de translation suivant l’axe
(D, y ).
Une liaison glissière permet d’obtenir ce mouvement.
Tous les vecteurs vitesse des points du piston sont égaux au cours du mouvement et le
champ des vitesses s’écrit ici : VA S / R VB S / R A et B (S) (4).
(4)
Dans ce cas, seul le
calcul direct permet
de déterminer le Les trajectoires de tous les points sont identiques et superposables.
vecteur vitesse…
Si ces trajectoires sont des droites, Si ces trajectoires sont des cercles, Si ces trajectoires sont des
on parle de mouvement de on parle de mouvement de trajectoires quelconques obtenues
TRANSLATION RECTILIGNE. TRANSLATION CIRCULAIRE. par association en série de liaisons
glissières, on parle de mouvement
de TRANSLATION.
1 2
2
0
0 0
1/0 : Translation rectiligne 2/0 : Translation circulaire 2/0 : Translation
Dans de très nombreux cas, un solide peut suivre un Position x(t)
mouvement de translation uniforme ou un mouvement
de translation uniformément varié.
t
Exemple d’une loi de mouvement en trapèze de vitesse. Vitesse x (t)
x 0 Phase II
Phase II : mouvement uniforme : la vitesse est la même au Phase III
cours du mouvement. Graphiquement, on observe une Phase I
fonction constante (segment de droite horizontal). t
Accélération x(t)
Phase I et Phase III : mouvement uniformément varié :
l’accélération est la même au cours du mouvement. t
Graphiquement, on observe une portion de droite
(segment de droite incliné)
3 - APPLICATION SIMPLE
Calcul du vecteur vitesse d’un point d’un rotor par le champ des vecteurs vitesse
Objectif : Calculer VA ,1 / 0 par le champ des vecteurs vitesse.
Florestan MATHURIN Page 4 sur 8
Cours 13 - Champs des Vecteurs Vitesse des Points d’un Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
Système réel Modèle
Rotor (1) z
de rayon R
O A y1
x y
x1
(0)
Turbine bulbe de basse chute ALSTOM
On commence bien sûr par représenter le paramétrage sur y1 y
une figure plane :
x1
Rappel : Il est IMPERATIF que le paramètre angulaire soit
représenté dans le premier cadran compris entre 0 et /2. On
z1 = z x
représente toujours cet angle indépendamment de sa valeur
et de son signe.
1 / 0 .z
On s’interroge sur la nature du mouvement du rotor 1 par rapport à 0. Le mouvement est un
mouvement de rotation autour d’un axe fixe (O, z ).
Ici, on retrouve un mouvement élémentaire
→ On passe par un point de vitesse connue (ici, c’est le point O).
En effet, il est judicieux de passer par le point O puisque VO 1 / 0 0
On applique le champ des vecteurs vitesse au mouvement de 1/0 entre le point A et le point
O.
On applique la définition en prenant soin de ne pas se tromper sur celle-ci.
→ VA 1 / 0 VO 1 / 0 AO 1 / 0
On définit le vecteur rotaƟon à l’aide des figures planes. → 1 / 0 .z
On exprime le vecteur AO . → AO R.y1
Le produit vectoriel s’écrit en « notation ingénieur » et s’effectue à l’aide des figures géométrales
On effectue le produit vectoriel. → VA 1 / 0 0 R.y1 .z
On obtient donc VA ,1 / 0 R. .x1
4 - TORSEUR CINEMATIQUE
Pour caractériser de manière condensée le champ des vecteurs vitesse d’un solide en
mouvement par rapport à un repère R, on utilise un outil mathématique appelé torseur.
On appelle ce torseur, torseur cinématique et on le note : CS / R S / R
V
A A S / R
La résultante de ce torseur cinématique, est le vecteur vitesse (instantané) de rotation S par
rapport à R : S / R .
Le moment de ce torseur est le vecteur vitesse de A S par rapport à R : VA S / R tel que A
et B (S) VA S / R VB S / R AB S / R .
Florestan MATHURIN Page 5 sur 8
Cours 13 - Champs des Vecteurs Vitesse des Points d’un Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
Rappel : Un torseur est un couple ordonné de deux champs vectoriels tel que :
Le 1er champ, appelé résultante du torseur, noté R , est un champ constant.
Le 2ème champ, appelé moment du torseur, noté M , est un champ variable vérifiant la
définition des champs de ce moment : A et B (Espace) MA MB AB R
A cause du terme S / R AB S / R le champ des vecteurs accélération des points d’un solide
ne vérifie pas la relation semblable à celle d’un champ des vecteurs vitesse d’un point d’un
solide. Il est donc impossible de bâtir un torseur avec le vecteur accélération comme
moment !!!
4.1. Notations
Soit les vecteurs S / R x .x y .y z .z et VA S / R v x .x v y .y v z .z . La notation condensée
de ces vecteurs en torseur cinématique peut se faire de deux manières :
« En colonne » : en bas à gauche, on indique le point où on exprime le torseur. En bas à
droite on indique la base dans laquelle on exprime S / R et VA S / R qui ont pour
composantes respectives x , y , z et v x , v y , v z .
x v x
CS / R y v y
v
A z z (x , y , z )
« En ligne » : en bas à gauche, on indique le point où on exprime le torseur. Il n’est plus utile
de préciser la base d’expression des vecteurs puisque celle-ci est clairement explicitée dans
le torseur.
x .x y .y z .z
C S / R v .x v .y v .z
A x y z
La notation en ligne est à privilégier car elle permet d’éviter de faire des projections lorsqu’un
vecteur possède des composantes exprimées dans des bases différentes.
4.2. « Transport » du torseur cinématique
Sachant que le champ des vecteurs vitesse des points d’un solide indéformable vérifie la
relation fondamentale A et B S VA S / R VB S / R AB S / R , l’expression du torseur
cinématique dépend du point en lequel on exprime le moment.
Par conséquent S / R et S / R représentent le même torseur cinématique.
V
A A S / R
V
B B S / R
S/R S /R
CS / R A et B S tel que VA S / R VB S / R AB S / R
A
VA S / R
B VB S / R
(5) ème
un 2 moyen
pour retenir cette
formule ! Petit moyen mnémotechnique(5) pour la relation VA S / R VB S / R AB S / R :
(6)
Attention « on
calcule un vecteur VA S / R VB S / R AB S / R peut s’écrire aussi VB S / R VA S / R BA S / R et S / R est la
vitesse par le champ
résultante du torseur cinématique ( R )
des vecteurs vitesse »
BABAR n’est que le
B A BA R BABAR(6)
moyen
mnémotechnique !
Florestan MATHURIN Page 6 sur 8
Cours 13 - Champs des Vecteurs Vitesse des Points d’un Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
4.3. Torseurs cinématiques particuliers
S /R 0
CS / R et S / R . VA S / R 0 → P S, VP S / R VA S / R PA S / R 0
V 0
A A S / R
→ Le solide S est immobile /R.
S / R 0
CS / R et S / R . VA S / R 0 → P S, VP S / R VA S / R PA S / R VA S / R
V 0
A A S / R
→ Tous les points de S ont même vitesse /R : le solide est animé d’un mouvement de
translation.
S / R 0
CS / R et S / R . VA S / R 0 → le torseur est un glisseur, il admet un axe
V 0
A A S / R
central () parallèle à S / R et O (), VO S / R 0 . De plus on a P S,
VP S / R VA S / R PA S / R
→ Le mouvement de S/R à l’instant t est un mouvement de rotation autour de (), axe central
du torseur cinématique appelé axe instantané de rotation ou axe de viration.
Interprétation graphique : S /R VDS / R
O D
A B C
()
A l’instant t + t l’axe instantané de rotation peut être différent (d’où le nom instantané).
S / R 0
CS / R et S / R . VA S / R 0 → le torseur est quelconque, il admet un
VA S / R 0
A
axe central () parallèle à S / R et on a O (), VO S / R . S / R avec λ R.
→ De plus O () et P S, VP S / R VA S / R PA S / R
→ Le mouvement de S/R à l’instant t est un mouvement hélicoïdal autour de (), axe central du
torseur cinématique : rotation de vitesse S / R autour de () plus translation de vitesse
VO S / R . S / R parallèlement à ()
Interprétation graphique : VBS / R
VOS / R
O B
A
()
Florestan MATHURIN Page 7 sur 8
Cours 13 - Champs des Vecteurs Vitesse des Points d’un Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
5 - TORSEURS CINEMATIQUES DES LIAISONS NORMALISEES
Chaque liaison normalisée possède un torseur cinématique.
Tous les torseurs
Liaison ponctuelle en O de normale (O, z ) Liaison hélicoïdale d’axe (O, x )
cinématiques des
liaisons normalisées z
z
sont à connaître par x v x x v x
cœur ! La page
entière est donc à y v y 0 0
connaître par cœur ! 0 O
0 0
O O z (x , y , z ) O (x , y , z )
x y y + 1 relation de
x
dépendance (7)
Liaison Linéaire Rectiligne d’axe (O, x ) et de Liaison pivot glissant d’axe (O, x )
normale (0, z )
z z
(7)
La relation de x v x x v x
dépendance s’écrit :
pas 0 vy O 0 0
vx . x 0 0 0
2. O O z (x , y , z ) O (x , y , z )
x y x y
Liaison linéaire annulaire d’axe (O, x ) Liaison pivot d’axe (O, x )
z z
x v x x 0
O y 0 O
0 0
0 0 0 (x ,y , z )
O z (x , y , z ) O
x y x y
Liaison appui plan de normale (O, z ) Liaison glissière d’axe (O, x )
z
z
0 vx 0 v x
0 vy O 0 0
O 0 0 0
O z (x , y , z ) O (x , y , z )
x
y
y
x
Liaison rotule en O Liaison complète
z z
x 0 0 0
O y 0 O
0 0
0 0 0(x , y , z )
O z (x , y , z ) O
y
x y x
Florestan MATHURIN Page 8 sur 8
Vous aimerez peut-être aussi
- DS3. 1 - EQUILIBREUSE DE ROUE Le Schéma Cinématique D'une Équilibreuse de Roue de Véhicule Est Donné Ci-Dessous. X, y ZDocument14 pagesDS3. 1 - EQUILIBREUSE DE ROUE Le Schéma Cinématique D'une Équilibreuse de Roue de Véhicule Est Donné Ci-Dessous. X, y ZMecprtAna100% (1)
- TD N°3 PFS Analytique - 3Document6 pagesTD N°3 PFS Analytique - 3Yassine BouchattaPas encore d'évaluation
- Devoir Sq8 StatiqueDocument8 pagesDevoir Sq8 StatiqueRuben100% (1)
- TP Treuil ProfDocument6 pagesTP Treuil ProfmidounPas encore d'évaluation
- 676 - Analyseionnelle Et Similitudes en Mécanique Des Fluides - Chemloul - TDMDocument4 pages676 - Analyseionnelle Et Similitudes en Mécanique Des Fluides - Chemloul - TDMChaker Ben ZidPas encore d'évaluation
- Préparation Concours20 CinématiqueDocument7 pagesPréparation Concours20 CinématiqueAdamPas encore d'évaluation
- Équilibrage Des Solides Tournants Profs PDFDocument8 pagesÉquilibrage Des Solides Tournants Profs PDFfitasmounirPas encore d'évaluation
- CI4 TD33-Centrifugeuse PDFDocument1 pageCI4 TD33-Centrifugeuse PDFOthmane TouilPas encore d'évaluation
- 32 Fermeture Geo ExercicesDocument4 pages32 Fermeture Geo Exerciceslaalai faicelPas encore d'évaluation
- Sinus MaticDocument3 pagesSinus MaticAbdelali YacoubiPas encore d'évaluation
- TDDocument6 pagesTDYassir Ez-znafryPas encore d'évaluation
- 32 Loi Entrée Sortie Géométrique D 1Document6 pages32 Loi Entrée Sortie Géométrique D 1hsn frk100% (1)
- DS1 MP - 13 - 11 - 21 (Sujet)Document7 pagesDS1 MP - 13 - 11 - 21 (Sujet)LASSOUED WAJDIPas encore d'évaluation
- CINEMATIQUE GRAPHIQUE Preparation 214 PDFDocument10 pagesCINEMATIQUE GRAPHIQUE Preparation 214 PDFYoussef RachidPas encore d'évaluation
- TD N°05 Statique CorrectionDocument9 pagesTD N°05 Statique CorrectionennajiPas encore d'évaluation
- Mecanisme de Transformation de Mouvement Bielle ManivelleDocument3 pagesMecanisme de Transformation de Mouvement Bielle Manivellesahl silverPas encore d'évaluation
- TD CIN Graphique - Pompe A PetroleDocument3 pagesTD CIN Graphique - Pompe A Petrolesallsmart100% (1)
- 00 2023 TD Révisions PTSI PTDocument8 pages00 2023 TD Révisions PTSI PTimadbourzamPas encore d'évaluation
- TD de SI - MécaniqueDocument3 pagesTD de SI - MécaniqueArthur TigreatPas encore d'évaluation
- Exo Cinematique PerforatriceDocument1 pageExo Cinematique PerforatriceFilaliAbderrahimPas encore d'évaluation
- Docs E7 FiltrageDocument2 pagesDocs E7 FiltrageMohamed Aly Sow100% (1)
- Dynamique SiDocument10 pagesDynamique Siamo norPas encore d'évaluation
- CS-TM1-TD Hyperstatisme Pompe Prise Camion CorrectionDocument7 pagesCS-TM1-TD Hyperstatisme Pompe Prise Camion CorrectionPierre LancelotPas encore d'évaluation
- 2-Corrigé TD Hyperstisme-Mat-ReacteurDocument2 pages2-Corrigé TD Hyperstisme-Mat-ReacteurManel AyebPas encore d'évaluation
- Exercice 1: CPGE - LIT - Marrakech Statique TD1 Pcsi1 OuikassiDocument1 pageExercice 1: CPGE - LIT - Marrakech Statique TD1 Pcsi1 Ouikassiakarne Youness100% (1)
- Apsim 18 DynamiqueDocument4 pagesApsim 18 DynamiqueKarima HamdanPas encore d'évaluation
- CORRIGEDocument16 pagesCORRIGEBenAmmareImedPas encore d'évaluation
- Phys - 027 CINEMATIQUE A 2 ET 3 DIMENSIONDocument15 pagesPhys - 027 CINEMATIQUE A 2 ET 3 DIMENSIONRichard KenandiPas encore d'évaluation
- Traction Et Compression Simple FiniDocument10 pagesTraction Et Compression Simple FiniToxic DEVPas encore d'évaluation
- Fonction Transmettre Transmission de Puissance Poulie Courroie ExercicesDocument9 pagesFonction Transmettre Transmission de Puissance Poulie Courroie ExercicesHamid MchachraPas encore d'évaluation
- Exercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFDocument2 pagesExercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFspectrum660% (1)
- TD 1Document2 pagesTD 1hello 128Pas encore d'évaluation
- 03 Cin 04 ChainesFermees Applications 01 CorrDocument7 pages03 Cin 04 ChainesFermees Applications 01 CorrMouhcine Ben MoussaPas encore d'évaluation
- 02-Exo Schema Cinemat PerforatriceDocument2 pages02-Exo Schema Cinemat PerforatriceMohsen SaidiPas encore d'évaluation
- Cours Sur Les StructuresDocument29 pagesCours Sur Les Structuresapi-302372012Pas encore d'évaluation
- Exo 8 Batteur A HouleDocument4 pagesExo 8 Batteur A HouleDABAKH LDEEBOYPas encore d'évaluation
- 17 Cinematique IIDocument13 pages17 Cinematique IIInes BaazizPas encore d'évaluation
- Cours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Document8 pagesCours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Youssef CherniPas encore d'évaluation
- Ci5 TD Mecanisme CameDocument1 pageCi5 TD Mecanisme Cameleroy makita loubakiPas encore d'évaluation
- Systemes Isostatiques PDFDocument5 pagesSystemes Isostatiques PDFImmamHadramyPas encore d'évaluation
- ChainesFermees Applications 01Document4 pagesChainesFermees Applications 01Tigma AarousPas encore d'évaluation
- Classe: LEM-Matériaux Métalliques Enseignante:: A1/A2/A3 Série de Travaux Dirigés N°1: BHOURI MariemDocument5 pagesClasse: LEM-Matériaux Métalliques Enseignante:: A1/A2/A3 Série de Travaux Dirigés N°1: BHOURI MariemTalel MissaouiPas encore d'évaluation
- Chapitre4 CisaillementDocument9 pagesChapitre4 CisaillementDawoud MayoufPas encore d'évaluation
- DL 1 Spe MP Rs Oct.22Document8 pagesDL 1 Spe MP Rs Oct.22Ibrahim OmraniPas encore d'évaluation
- Thème 2 - Boite de Commande de Raboteuse-1Document1 pageThème 2 - Boite de Commande de Raboteuse-1Anime forever 2016Pas encore d'évaluation
- 208 Prehenseur CorrigeDocument4 pages208 Prehenseur CorrigeAhmed TalsiPas encore d'évaluation
- Examen TS 2022Document1 pageExamen TS 2022yasmin Hassani100% (1)
- DL 1 Spe MP RS Oct.22 CorrigéDocument6 pagesDL 1 Spe MP RS Oct.22 CorrigéHouda HoudaPas encore d'évaluation
- TorseurDocument46 pagesTorseurnooneoveronePas encore d'évaluation
- Chap2 Leçon2 3&4Document52 pagesChap2 Leçon2 3&4Guiliass100% (2)
- Exercices - Cotation Fonctionnelle CorrigeDocument9 pagesExercices - Cotation Fonctionnelle CorrigeLaurent MansieuxPas encore d'évaluation
- Cinématique GraphiqueDocument4 pagesCinématique GraphiqueDABAKH LDEEBOYPas encore d'évaluation
- CNC Si MP 2009 CG PDFDocument14 pagesCNC Si MP 2009 CG PDFJassir AmgroudPas encore d'évaluation
- Flexion partie3RDM2Document9 pagesFlexion partie3RDM2khalidPas encore d'évaluation
- Liaison Hélicoidale ProfDocument12 pagesLiaison Hélicoidale ProftounsiPas encore d'évaluation
- Cine Graph EleveDocument8 pagesCine Graph EleveMohammed DahbiPas encore d'évaluation
- Cours Modelisation Des Liaisons PRDocument4 pagesCours Modelisation Des Liaisons PRAgriIT •Pas encore d'évaluation
- Cours Cinematique GraphDocument11 pagesCours Cinematique GraphEtienne BouronPas encore d'évaluation
- Calculs RoulementsDocument1 pageCalculs RoulementscPas encore d'évaluation
- Ex 15 16Document18 pagesEx 15 16Sd instruPas encore d'évaluation
- TD 16 - Liaisons - Schéma CinématiqueDocument4 pagesTD 16 - Liaisons - Schéma Cinématiquebhs channelPas encore d'évaluation
- Melangeur de Peinture Bi-AxialDocument18 pagesMelangeur de Peinture Bi-AxialBalalaŇaŖîfPas encore d'évaluation
- Integration Scei 2020Document2 pagesIntegration Scei 2020BalalaŇaŖîfPas encore d'évaluation
- PolytechDocument7 pagesPolytechBalalaŇaŖîfPas encore d'évaluation
- IliasssDocument13 pagesIliasssBalalaŇaŖîf100% (1)
- Hors Erasmus 14 Pays, 31 Partenaires Argentine Brésil Erasmus 19 Pays, 38 PartenairesDocument2 pagesHors Erasmus 14 Pays, 31 Partenaires Argentine Brésil Erasmus 19 Pays, 38 PartenairesBalalaŇaŖîfPas encore d'évaluation
- CcinpDocument12 pagesCcinpBalalaŇaŖîfPas encore d'évaluation
- Toute La MP en Fiches - Maths, Physique, Chimie PDFDocument464 pagesToute La MP en Fiches - Maths, Physique, Chimie PDFBalalaŇaŖîf100% (1)
- Cours 06Document4 pagesCours 06BalalaŇaŖîfPas encore d'évaluation
- Cours 10Document4 pagesCours 10BalalaŇaŖîfPas encore d'évaluation
- Cours 12Document5 pagesCours 12BalalaŇaŖîfPas encore d'évaluation
- I - ResultatsDocument1 pageI - ResultatsBalalaŇaŖîfPas encore d'évaluation
- Cours 14Document4 pagesCours 14BalalaŇaŖîfPas encore d'évaluation
- Cours 09Document9 pagesCours 09BalalaŇaŖîfPas encore d'évaluation
- Cours 04Document10 pagesCours 04BalalaŇaŖîfPas encore d'évaluation
- Exo MatricesDocument3 pagesExo MatricesBalalaŇaŖîfPas encore d'évaluation
- Resumé Ouikassi ADocument30 pagesResumé Ouikassi AkamalPas encore d'évaluation
- Cours 13Document8 pagesCours 13BalalaŇaŖîfPas encore d'évaluation
- Physique Résumé Du Cours en Fiches MPSI-MP PDFDocument176 pagesPhysique Résumé Du Cours en Fiches MPSI-MP PDFzakari100% (2)
- Cours 16Document5 pagesCours 16BalalaŇaŖîfPas encore d'évaluation
- 15562Document6 pages15562BalalaŇaŖîfPas encore d'évaluation
- Cours 05Document8 pagesCours 05BalalaŇaŖîfPas encore d'évaluation
- Résumé Asservissement SIDocument20 pagesRésumé Asservissement SIBalalaŇaŖîf100% (6)
- Cours 07Document8 pagesCours 07BalalaŇaŖîfPas encore d'évaluation
- CNC Si MP 2019Document25 pagesCNC Si MP 2019BalalaŇaŖîfPas encore d'évaluation
- ResumesCoursSpe PDFDocument180 pagesResumesCoursSpe PDFYasser LamyasserPas encore d'évaluation
- Melangeur de Peinture Bi-AxialDocument18 pagesMelangeur de Peinture Bi-AxialBalalaŇaŖîfPas encore d'évaluation
- Tarifs-SFPA-CA 5juillet2019 PDFDocument5 pagesTarifs-SFPA-CA 5juillet2019 PDFBalalaŇaŖîfPas encore d'évaluation
- 03 Poster ReductionDocument1 page03 Poster ReductionBalalaŇaŖîfPas encore d'évaluation
- Génie InfoDocument2 pagesGénie InfoBalalaŇaŖîfPas encore d'évaluation
- PDF - Toute La MPSI en Fiches - Maths, Physique, Chimie PDFDocument512 pagesPDF - Toute La MPSI en Fiches - Maths, Physique, Chimie PDFAlison Harris92% (12)
- BUL t.61 z.2Document130 pagesBUL t.61 z.2joPas encore d'évaluation
- EXAMEN CM CNAM Sujet 2 Session 1Document2 pagesEXAMEN CM CNAM Sujet 2 Session 1Nwilfried WiillyPas encore d'évaluation
- TP 2Document6 pagesTP 2mouna zouaouiPas encore d'évaluation
- Épreuve Sciences Physiques Classe 4ème Sciences 1 Prof: Chebbi RachidDocument4 pagesÉpreuve Sciences Physiques Classe 4ème Sciences 1 Prof: Chebbi RachidMohamed SaidiPas encore d'évaluation
- Asg 5 Departs MoteurDocument38 pagesAsg 5 Departs MoteurGhofrane Ben Slama100% (2)
- Correction Exercices Photometrie 2Document4 pagesCorrection Exercices Photometrie 2DJ Sly Kimo67% (3)
- Hyperstatisme CoursDocument5 pagesHyperstatisme CoursAmina AzmiPas encore d'évaluation
- TD1 Calcul Des Impédances (1562)Document7 pagesTD1 Calcul Des Impédances (1562)Ridha KasriPas encore d'évaluation
- Compte Rendu EpuDocument55 pagesCompte Rendu EpuKooraNow HD100% (1)
- Mprendre La RheologieDocument223 pagesMprendre La RheologieJmp Klm100% (2)
- Tel 00002564Document27 pagesTel 00002564Hubert DjemnePas encore d'évaluation
- Activité L' Énergie CinétiqueDocument2 pagesActivité L' Énergie CinétiqueShakib MesbahiPas encore d'évaluation
- Rappel de Notions Fondamentales Sur Les Circuits ÉlectriquesDocument7 pagesRappel de Notions Fondamentales Sur Les Circuits ÉlectriquesBanany Az-eddinePas encore d'évaluation
- Chapitre 1 Généralités Sur La Compatibilité ÉlectromagnétiqueDocument31 pagesChapitre 1 Généralités Sur La Compatibilité Électromagnétiqueسمير المتوليPas encore d'évaluation
- 4195 Dossier Reponses Epreuve E11 Bac Pro RC 2013Document14 pages4195 Dossier Reponses Epreuve E11 Bac Pro RC 2013Kouchad FouadPas encore d'évaluation
- 2 Serie TD ADocument3 pages2 Serie TD Ayugensh2Pas encore d'évaluation
- Combustion - Chap 2 PDFDocument18 pagesCombustion - Chap 2 PDFAlekhya100% (2)
- Sans TitreDocument41 pagesSans TitreSafiya TouilPas encore d'évaluation
- Chapitre 5 Géométrie de MasseDocument8 pagesChapitre 5 Géométrie de MasseSaiid RiadhPas encore d'évaluation
- LMD Bouanani Abes PDFDocument47 pagesLMD Bouanani Abes PDFTitoPas encore d'évaluation
- R Sum Ondes Et Vibrations FRDocument2 pagesR Sum Ondes Et Vibrations FRahmed ahmadPas encore d'évaluation
- Colle 7 Tsi PFS 6Document1 pageColle 7 Tsi PFS 6yasser bhPas encore d'évaluation
- Balastros Sola BasicDocument15 pagesBalastros Sola BasicscatmaPas encore d'évaluation
- tp1 Moteur SérieDocument3 pagestp1 Moteur SérieAb CdPas encore d'évaluation
- Etude EolienneDocument124 pagesEtude Eoliennetoto100% (2)
- Partie 1 Chap 3.modèle OndulatoireDocument8 pagesPartie 1 Chap 3.modèle OndulatoiredPas encore d'évaluation
- Chapitre Matériaux Magnétiques FinisDocument23 pagesChapitre Matériaux Magnétiques Finismiss khanPas encore d'évaluation
- CH I Rappel de Thermodynamique10-11Document15 pagesCH I Rappel de Thermodynamique10-11SirineJamoussiPas encore d'évaluation
- Biomécanique Et Course À PiedDocument47 pagesBiomécanique Et Course À Piedsb aliPas encore d'évaluation