Vous aimerez peut-être aussi
- TP1 automatismeLAIIDocument3 pagesTP1 automatismeLAIIfakhri menjliPas encore d'évaluation
- Automate 1111Document8 pagesAutomate 1111Yassine LazragPas encore d'évaluation
- Série Des ExercicesDocument5 pagesSérie Des ExercicesInteg StiPas encore d'évaluation
- Mikro CDocument23 pagesMikro COUSKRIPas encore d'évaluation
- Temp or I SationsDocument40 pagesTemp or I SationsPaul DayPas encore d'évaluation
- TP4 Onduleur Electronique de PuissanceDocument31 pagesTP4 Onduleur Electronique de PuissancerachidPas encore d'évaluation
- Bloc Compteur s7 PDFDocument3 pagesBloc Compteur s7 PDFNabilBouabanaPas encore d'évaluation
- Chapitre 3 - AutomatismeDocument9 pagesChapitre 3 - Automatismesaaadi aymenPas encore d'évaluation
- Ouvre-Portail (Projet Réalisé Par Pic)Document8 pagesOuvre-Portail (Projet Réalisé Par Pic)Hamza DhPas encore d'évaluation
- Sap Master Sequenceur PneumatiqueDocument8 pagesSap Master Sequenceur PneumatiqueSoma PalacePas encore d'évaluation
- Psy4001 FR 10 2007 PDFDocument20 pagesPsy4001 FR 10 2007 PDFAmrouchene DjouherPas encore d'évaluation
- Systeme de Gestion de Feux de CarrefourDocument4 pagesSysteme de Gestion de Feux de CarrefourYOUNES KABBAJPas encore d'évaluation
- 6 GemmaDocument5 pages6 GemmaSerge RINAUDOPas encore d'évaluation
- TD - Localisation Des DéfaillancesDocument16 pagesTD - Localisation Des Défaillanceskhaled souli100% (1)
- TP ApiDocument7 pagesTP ApiOthmane FroukhPas encore d'évaluation
- RGourdeau GrafcetDocument79 pagesRGourdeau GrafcetKãrîm KåhlìPas encore d'évaluation
- Révision Examen FinalDocument7 pagesRévision Examen Finalasmaahmedhassan12Pas encore d'évaluation
- API - Cours RésuméDocument32 pagesAPI - Cours RésuméalmahfoudelfadiliPas encore d'évaluation
- TP Initiation APIDocument14 pagesTP Initiation APIwilfried karmain fenossihPas encore d'évaluation
- Calibres DisjoncteursDocument9 pagesCalibres Disjoncteursabderrahmane222a abderrahmanePas encore d'évaluation
- TP 6 FluidsimDocument8 pagesTP 6 FluidsimMohamedBejjaPas encore d'évaluation
- TPno1 InitiationauxAutomatesProgrammablesIndustriels APISiemensS7 300Document6 pagesTPno1 InitiationauxAutomatesProgrammablesIndustriels APISiemensS7 300halim otmanePas encore d'évaluation
- Chapitre V - Mise en Oeuvre Des Automatismes Sur APIDocument10 pagesChapitre V - Mise en Oeuvre Des Automatismes Sur APIdallagi mohamedPas encore d'évaluation
- BROYEUR DE CEREALES2013 Devoir EST LTIDocument3 pagesBROYEUR DE CEREALES2013 Devoir EST LTIjosias zinsouPas encore d'évaluation
- Etude Composant Depart Moteur DRDocument15 pagesEtude Composant Depart Moteur DRDjamal Zenaidi100% (1)
- Initiation 3 TIA Portal MS1Document31 pagesInitiation 3 TIA Portal MS1Chakib AutomationPas encore d'évaluation
- Support de Travaux Pratique E.E.PDocument41 pagesSupport de Travaux Pratique E.E.PFarid KhouchaPas encore d'évaluation
- Travaux PratiquesDocument2 pagesTravaux PratiquesFatima Zahra AmalouPas encore d'évaluation
- Initiation À La MaintenanceDocument11 pagesInitiation À La MaintenanceMed AliPas encore d'évaluation
- DS Securite2015Document6 pagesDS Securite2015Aicha B'mhPas encore d'évaluation
- Support de Cours - Chap6-GemmaDocument18 pagesSupport de Cours - Chap6-GemmahajarPas encore d'évaluation
- Demarrage Des Moteurs - V2k6Document28 pagesDemarrage Des Moteurs - V2k6Jamel Riahi100% (1)
- Correction Manuel D'activité 20-39Document20 pagesCorrection Manuel D'activité 20-39Oula F'zPas encore d'évaluation
- TD GRACET Percage Correction PDFDocument5 pagesTD GRACET Percage Correction PDFMAYSSA AMORPas encore d'évaluation
- Rappels GrafcetDocument44 pagesRappels GrafcetAbdallah BelabbesPas encore d'évaluation
- crs7 Ci1 Montage Va Et Vient CorDocument1 pagecrs7 Ci1 Montage Va Et Vient CorEddine KhierPas encore d'évaluation
- TD N°1-Eq Puiss - Redress MonoDocument5 pagesTD N°1-Eq Puiss - Redress MonoTG RIDAPas encore d'évaluation
- Cablage de DemarrageDocument6 pagesCablage de DemarrageDiakitePas encore d'évaluation
- TPETIDocument10 pagesTPETISam DikoPas encore d'évaluation
- Telerupteur3 PDFDocument6 pagesTelerupteur3 PDFsumaleePas encore d'évaluation
- Examen de Fin de Module Installation Entretien Commande A TBT TemiDocument2 pagesExamen de Fin de Module Installation Entretien Commande A TBT TemisbensouayahPas encore d'évaluation
- 8 Lire Un Schema ÉlectriqueDocument14 pages8 Lire Un Schema Électriquetoufik1986Pas encore d'évaluation
- Puissance en MonophaseDocument3 pagesPuissance en MonophaseHaroun Samih100% (1)
- Exo Cor Transfo02 PDFDocument3 pagesExo Cor Transfo02 PDFkahinaPas encore d'évaluation
- 1-Principe de Programmation LadderDocument13 pages1-Principe de Programmation LadderElmokh LassaadPas encore d'évaluation
- Série2 LaEEA A2 2021Document3 pagesSérie2 LaEEA A2 2021Salim BouaziziPas encore d'évaluation
- دروس هندسة كهربائية للمبتدئين Cours Systeme ÉlectriqueDocument53 pagesدروس هندسة كهربائية للمبتدئين Cours Systeme ÉlectriqueEl ardaoui SalmaPas encore d'évaluation
- Schema Démarrage Moteur AsynchroneDocument15 pagesSchema Démarrage Moteur Asynchronesoukayna barraPas encore d'évaluation
- Chapitre 1 Grafset (API)Document12 pagesChapitre 1 Grafset (API)priankasy679Pas encore d'évaluation
- Circuit Specialise NE555Document7 pagesCircuit Specialise NE555Toàn Dương LêPas encore d'évaluation
- Programmation Des API Part - 1Document34 pagesProgrammation Des API Part - 1sami bmPas encore d'évaluation
- TPN°14 - Mémoire - Temporisation - Comptage - PL7 PRO - CorrigéDocument13 pagesTPN°14 - Mémoire - Temporisation - Comptage - PL7 PRO - CorrigébelkacemiPas encore d'évaluation
- MihDocument32 pagesMihMohamed OuaggaPas encore d'évaluation
- Les Installations Electriques IndustriellesDocument3 pagesLes Installations Electriques IndustriellesRey divino MoukouaPas encore d'évaluation
- Grafcet Api1Document21 pagesGrafcet Api1Mouhcine ZianeePas encore d'évaluation
- CH Grafcet PDFDocument41 pagesCH Grafcet PDFNabilBouabanaPas encore d'évaluation
- TP 12 81Document8 pagesTP 12 81leukwe delphesPas encore d'évaluation
- Etude Et Réalisation D'un Circuit de Recharge de La Batterie Au Lithium Suivant Les Deux Etapes Mode Courant Constant - 1 - CompressedDocument59 pagesEtude Et Réalisation D'un Circuit de Recharge de La Batterie Au Lithium Suivant Les Deux Etapes Mode Courant Constant - 1 - CompressedASDOPas encore d'évaluation
- Etude de CasDocument8 pagesEtude de CasMeryem JabriPas encore d'évaluation
- Formulaire TransmissionDocument7 pagesFormulaire TransmissionAymen ZammaliPas encore d'évaluation
- Francais Bac PDFDocument25 pagesFrancais Bac PDFAbdèlàziz100% (2)
- Comparateur ResumeDocument2 pagesComparateur ResumeAbdellah FaqdaniPas encore d'évaluation
- Règles de Câblage Pour ArmoiresDocument3 pagesRègles de Câblage Pour ArmoiresmohakvayliPas encore d'évaluation
- DOC033.77.30134.Sep09.webDocument8 pagesDOC033.77.30134.Sep09.webAbdellah FaqdaniPas encore d'évaluation
- TD Poulie CourroieDocument2 pagesTD Poulie CourroieAbdellah Faqdani100% (2)
- Quel Registre de Langue UtiliserDocument4 pagesQuel Registre de Langue UtiliserAbdellah FaqdaniPas encore d'évaluation
- Travaux D'arret 2021 de CFBCDocument6 pagesTravaux D'arret 2021 de CFBCAbdellah FaqdaniPas encore d'évaluation
- Travaux D'arret 2021 CRTDocument72 pagesTravaux D'arret 2021 CRTAbdellah FaqdaniPas encore d'évaluation
- Fonctions RéciproquesDocument5 pagesFonctions RéciproquesLeila ElPas encore d'évaluation
- Parametres TransfosDocument8 pagesParametres Transfosben_abdallah_mohamed@yahoo.frPas encore d'évaluation
- DOC033.77.30134.Sep09.webDocument8 pagesDOC033.77.30134.Sep09.webAbdellah FaqdaniPas encore d'évaluation
- PV PDF 22315311Document1 pagePV PDF 22315311Abdellah FaqdaniPas encore d'évaluation
- Le Pere Goriot de BalzacDocument7 pagesLe Pere Goriot de BalzacYassinePas encore d'évaluation
- Francais Bac PDFDocument25 pagesFrancais Bac PDFAbdèlàziz100% (2)
- Projection Dans Le Plan Mosaid CTCFDocument1 pageProjection Dans Le Plan Mosaid CTCFAbdellah FaqdaniPas encore d'évaluation
- DR03 Transmission CDocument5 pagesDR03 Transmission CAbdellah FaqdaniPas encore d'évaluation
- Quel Registre de Langue UtiliserDocument4 pagesQuel Registre de Langue UtiliserAbdellah FaqdaniPas encore d'évaluation
- Tableur ExcelDocument10 pagesTableur Excelabdessamad elmotarajjy100% (1)
- Microcontrôleur Famille PIC 16oDocument10 pagesMicrocontrôleur Famille PIC 16oAbdellah Faqdani100% (1)
- Exercices 6 Traiter-ProfDocument4 pagesExercices 6 Traiter-ProfAbdellah FaqdaniPas encore d'évaluation
- Formulaire TransmissionDocument7 pagesFormulaire TransmissionAymen ZammaliPas encore d'évaluation
- ExerciceDocument4 pagesExerciceAbdellah FaqdaniPas encore d'évaluation
- Amplificateur Operationnel Resume Et ExercicesDocument9 pagesAmplificateur Operationnel Resume Et ExercicesRidha RaoufPas encore d'évaluation
- Série 1 - Ar Travail Et Puissance D'une ForceDocument1 pageSérie 1 - Ar Travail Et Puissance D'une ForceAbdellah FaqdaniPas encore d'évaluation
- Examens Bac International PC Se 2017 RDocument11 pagesExamens Bac International PC Se 2017 RAbdellah FaqdaniPas encore d'évaluation
- DR03 Transmission CDocument5 pagesDR03 Transmission CAbdellah FaqdaniPas encore d'évaluation
- Formulaire TransmissionDocument7 pagesFormulaire TransmissionAymen ZammaliPas encore d'évaluation
- TransReaAcideBaseExercices 16-17 PDFDocument7 pagesTransReaAcideBaseExercices 16-17 PDFالغزيزال الحسن EL GHZIZAL HassanePas encore d'évaluation
- TD 1 EngreanagesDocument3 pagesTD 1 EngreanagesAbdellah FaqdaniPas encore d'évaluation
- Grenoble/ValenceDocument4 pagesGrenoble/ValencebleuPDFPas encore d'évaluation
- Fiat StiloDocument2 pagesFiat StilotonyPas encore d'évaluation
- Exemple Carnet de Bord VehiculeDocument3 pagesExemple Carnet de Bord VehiculeEL BAZ IBTISSAM100% (3)
- 1yB1HFCbxm3GgOJW13ZV0 skXN9TfwM0b PDFDocument170 pages1yB1HFCbxm3GgOJW13ZV0 skXN9TfwM0b PDFRida BldPas encore d'évaluation
- HondaDocument3 pagesHondaIsrael Moller Wildcat100% (1)
- Yzfr 1Document116 pagesYzfr 1aouadabassPas encore d'évaluation
- L19A7184 Spare Parts Front Page DL210Document44 pagesL19A7184 Spare Parts Front Page DL210ESRAPas encore d'évaluation
- 416D B2D PDFDocument756 pages416D B2D PDFvictor100% (1)
- Recueil Des Accidents de 2016 VF PDFDocument118 pagesRecueil Des Accidents de 2016 VF PDFfff fffPas encore d'évaluation
- ES4Document3 pagesES4Florian MoraPas encore d'évaluation
- Conception D'une GareDocument36 pagesConception D'une GareJabir ArifPas encore d'évaluation
- Risques Pour La Sécurité - Notions de Conduite Préventive Des Chariots ÉlévateursDocument14 pagesRisques Pour La Sécurité - Notions de Conduite Préventive Des Chariots ÉlévateursHoussem BensalemPas encore d'évaluation
- Agrofarm 85 100 Parts CatalogDocument427 pagesAgrofarm 85 100 Parts CatalogFR100% (5)
- Sujets PFE 2015Document2 pagesSujets PFE 2015mohammedPas encore d'évaluation
- 1251 99 21 02Document238 pages1251 99 21 02jakalae5263Pas encore d'évaluation
- Projets FérroviairesDocument2 pagesProjets FérroviairesHedia ZekriPas encore d'évaluation
- Tarif PGR Renault Dacia-2015Document2 pagesTarif PGR Renault Dacia-2015achraf2009Pas encore d'évaluation
- NF en 13231-1 (Recept. Tvx. Voie)Document17 pagesNF en 13231-1 (Recept. Tvx. Voie)Ali Bda100% (2)
- Training Renault Airbag FRDocument45 pagesTraining Renault Airbag FRbenadda makhloufPas encore d'évaluation
- 14 11 2015Document258 pages14 11 2015MamiBenzPas encore d'évaluation
- Espace Killy 2011Document1 pageEspace Killy 2011HCE4Pas encore d'évaluation
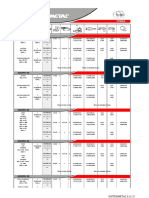
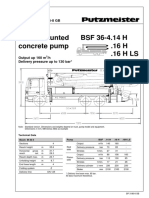
- TB 3186 en BSF 36 4 14H 16H 16HLSDocument2 pagesTB 3186 en BSF 36 4 14H 16H 16HLSالمهندسوليدالطويلPas encore d'évaluation
- HTTPSCDN - Yamaha Motor - Euowner ManualsScootersU4P9F0 PDFDocument76 pagesHTTPSCDN - Yamaha Motor - Euowner ManualsScootersU4P9F0 PDFGLPas encore d'évaluation
- TG - 19-NI 52-Descentes de Forte Pente Et de Grande Longueur Sur Routes de Type AutorouteDocument6 pagesTG - 19-NI 52-Descentes de Forte Pente Et de Grande Longueur Sur Routes de Type Autorouterachid zoubiriPas encore d'évaluation
- Trace Combine 04 03 2019Document34 pagesTrace Combine 04 03 2019vane2Pas encore d'évaluation
- Stralis 430Document4 pagesStralis 430fatalgamersPas encore d'évaluation
- Afdr 06Document37 pagesAfdr 06abdelkader cheikhPas encore d'évaluation
- TI Ecitaro 2020 FRDocument16 pagesTI Ecitaro 2020 FRzuffflor_925748656Pas encore d'évaluation
- Dégradation Des RoutesDocument63 pagesDégradation Des Routespapa bocar ba100% (3)