Vous aimerez peut-être aussi
- AI ManualDocument20 pagesAI ManualAbdeldjalil HassounPas encore d'évaluation
- Capteurs Partie 2Document52 pagesCapteurs Partie 2Abderrahmane SmaaliPas encore d'évaluation
- Aquerir Les Informations Par Les CapteursDocument34 pagesAquerir Les Informations Par Les CapteursElias HaberPas encore d'évaluation
- Fiche de TP de Capteur Et3Document15 pagesFiche de TP de Capteur Et3Fotcha EricPas encore d'évaluation
- Cours Les DetecteursDocument6 pagesCours Les DetecteursWassiim StiliPas encore d'évaluation
- Cours CapteurDocument43 pagesCours CapteurAmine ElazzabiPas encore d'évaluation
- Cours Les DetecteursDocument6 pagesCours Les DetecteursOthmane ElmouatamidPas encore d'évaluation
- P510 PomuxDocument8 pagesP510 Pomuxmartin mijangos garciaPas encore d'évaluation
- Cours Capteurs 2020 Part3Document22 pagesCours Capteurs 2020 Part3Balhoudi HelmiPas encore d'évaluation
- Paramètres de DétectionDocument6 pagesParamètres de DétectionMenad HaraPas encore d'évaluation
- La Voiture Autonome 2-ConvertiDocument24 pagesLa Voiture Autonome 2-ConvertiSalmaPas encore d'évaluation
- DetecteursDocument14 pagesDetecteursMazama-Esso Moddoh OclooPas encore d'évaluation
- TPN 4: Détection Infrarouge Et Étude Du Détecteur Photoélectrique - RéflexDocument8 pagesTPN 4: Détection Infrarouge Et Étude Du Détecteur Photoélectrique - RéflexFotcha EricPas encore d'évaluation
- Etude Des CapteursDocument17 pagesEtude Des CapteursKhalil BelghiyatiPas encore d'évaluation
- Caracteristiques - Etudes - CapteursDocument26 pagesCaracteristiques - Etudes - CapteursSalissou Salha100% (1)
- TP Capteur InductifDocument13 pagesTP Capteur Inductifelmajdi chaymae100% (1)
- 828 Lescapteurs 2 SteDocument10 pages828 Lescapteurs 2 SteichoualanePas encore d'évaluation
- Les CapteursDocument32 pagesLes CapteursNabilBouabana100% (2)
- Cours Les Capteurs TORDocument14 pagesCours Les Capteurs TORSalah Eddine Chouikh100% (1)
- Comment Faire La Conception D'un Capteur de Vibration SW - 420Document23 pagesComment Faire La Conception D'un Capteur de Vibration SW - 420lailabensaadoun8Pas encore d'évaluation
- Cours Les DetecteursDocument6 pagesCours Les DetecteursBaya Ait-Mokhtar100% (1)
- A6V10333856 ItDocument8 pagesA6V10333856 ItCah EnoPas encore d'évaluation
- Radar Primare (Zitouni+merabet)Document22 pagesRadar Primare (Zitouni+merabet)Mahieddine Anouar HadjadjPas encore d'évaluation
- Le Fonctionnement Et La Technologie Des Détecteurs À UltrasonsDocument8 pagesLe Fonctionnement Et La Technologie Des Détecteurs À UltrasonsIlyes kPas encore d'évaluation
- Capteur de Vitesse ALFANODocument8 pagesCapteur de Vitesse ALFANOstephen DRUILHEPas encore d'évaluation
- Fiche Technique Spectrophotomètre 6300 - 6320Document1 pageFiche Technique Spectrophotomètre 6300 - 6320رشيد العماريPas encore d'évaluation
- Bathymetre Echosondeur HydroSurveyorDocument2 pagesBathymetre Echosondeur HydroSurveyorIki RaulPas encore d'évaluation
- TP n4 - Propriétés D'absorption Et de Réflexion Aux Micro-Ondes Des Différents MatériauxDocument2 pagesTP n4 - Propriétés D'absorption Et de Réflexion Aux Micro-Ondes Des Différents MatériauxBENAKCHA A.Pas encore d'évaluation
- TORRIXDocument8 pagesTORRIXmohsenPas encore d'évaluation
- TP CapteurDocument6 pagesTP Capteurbouaalimustapha02Pas encore d'évaluation
- Radar de Recul Avec Afficheur Avec BuzzerDocument5 pagesRadar de Recul Avec Afficheur Avec BuzzerLahouari FatahPas encore d'évaluation
- O5d151 01 - FR FRDocument4 pagesO5d151 01 - FR FRRida DahmounPas encore d'évaluation
- PT 100 PDFDocument18 pagesPT 100 PDFyoussefPas encore d'évaluation
- pt100pdf PDFDocument18 pagespt100pdf PDFyoussefPas encore d'évaluation
- Detection D'objetsDocument1 pageDetection D'objetsK OuertaniPas encore d'évaluation
- Les Detecteurs de PresenceDocument10 pagesLes Detecteurs de PresenceIdris IlungaPas encore d'évaluation
- Précautions de Pose Et Test de La Portée Radio Du Système DiagralDocument22 pagesPrécautions de Pose Et Test de La Portée Radio Du Système DiagralcrutPas encore d'évaluation
- DW-AS-703-M18-002 Datasheet - ENDocument3 pagesDW-AS-703-M18-002 Datasheet - ENMujahidin AhmadPas encore d'évaluation
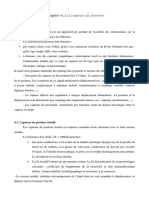
- Chapitre - 04 - Capteur de PositionDocument7 pagesChapitre - 04 - Capteur de Positionmiss khan100% (1)
- Chapitre 18 - TP InterférencesDocument2 pagesChapitre 18 - TP InterférencesHugo MorettiPas encore d'évaluation
- 3 Capteurs CapacitifsDocument6 pages3 Capteurs Capacitifsjlcharron100% (1)
- DW - A - 62 - M12: Data SheetDocument2 pagesDW - A - 62 - M12: Data SheetmarkelovfyodorPas encore d'évaluation
- Expose Capteur UltrasonDocument29 pagesExpose Capteur UltrasonKarima Mayzi100% (5)
- SUPPORT Localisation Vanne & Alignement Cana Janv 2019Document37 pagesSUPPORT Localisation Vanne & Alignement Cana Janv 2019Farouk BENSALAHPas encore d'évaluation
- Les Capteurs À Ultrasons Émettent Un Tissage Acoustique Compris Entre 20 Hertz Et 20 Kilohertz Et Déterminent La DistanceDocument7 pagesLes Capteurs À Ultrasons Émettent Un Tissage Acoustique Compris Entre 20 Hertz Et 20 Kilohertz Et Déterminent La Distancerocceli nzoulou100% (1)
- Endress+Hauser Widerstandsthermometer Omnigrad M TR10 TI FRDocument20 pagesEndress+Hauser Widerstandsthermometer Omnigrad M TR10 TI FRSAHOMA OMARIPas encore d'évaluation
- Ch11 Generalites Sur Les CapteursDocument8 pagesCh11 Generalites Sur Les CapteursLassaad ElmokhPas encore d'évaluation
- Developpement Des Detecteurs de TemperatureDocument7 pagesDeveloppement Des Detecteurs de TemperaturebenrehoumadhiaPas encore d'évaluation
- Notice PASM24WDocument4 pagesNotice PASM24WmourissePas encore d'évaluation
- Instrumentation Et Mesures 4Document9 pagesInstrumentation Et Mesures 4Mustapha AmsPas encore d'évaluation
- Chapitre 1 Generalites Sur Les CapteursDocument7 pagesChapitre 1 Generalites Sur Les Capteursmarwa hammamiPas encore d'évaluation
- Chapitre 1 Fondamentales Sur Les Détecteurs PDFDocument10 pagesChapitre 1 Fondamentales Sur Les Détecteurs PDFHadjer Crb100% (1)
- CQ RTE - Outils Etr AlisationDocument86 pagesCQ RTE - Outils Etr AlisationRADIFPas encore d'évaluation
- Flame Sensor ModDocument5 pagesFlame Sensor ModJean Claude KonanPas encore d'évaluation
- Chapitre-Ultrasons Notions Sur Les UltrasonsDocument19 pagesChapitre-Ultrasons Notions Sur Les UltrasonsKarim FathallahPas encore d'évaluation
- ch4 CI9 I3 Capteur TORDocument6 pagesch4 CI9 I3 Capteur TORcpommierPas encore d'évaluation
- O5d100 04 - FR FRDocument4 pagesO5d100 04 - FR FRbenazi marPas encore d'évaluation
- Manuel Utilisateur WinCC Flexible FR-FRDocument488 pagesManuel Utilisateur WinCC Flexible FR-FRHamed YazidiPas encore d'évaluation
- Spacial NSYS3D32515 DocumentDocument2 pagesSpacial NSYS3D32515 Documentsoulaymane daifPas encore d'évaluation
- S120 Safety FCT Man 0620 FR-FRDocument450 pagesS120 Safety FCT Man 0620 FR-FRsoulaymane daifPas encore d'évaluation
- Emm V1.0Document54 pagesEmm V1.0soulaymane daifPas encore d'évaluation
- Mesure OutillageDocument4 pagesMesure Outillagesoulaymane daifPas encore d'évaluation
- Distribution de La MémoireDocument22 pagesDistribution de La Mémoiresoulaymane daifPas encore d'évaluation
- s71500t Motion Control Function Manual FR-FR FR-FRDocument690 pagess71500t Motion Control Function Manual FR-FR FR-FRsoulaymane daifPas encore d'évaluation
- Rapport de Stage DDDocument21 pagesRapport de Stage DDsoulaymane daifPas encore d'évaluation
- Selection Electricite de 115 Outils Metriques CM E18Document2 pagesSelection Electricite de 115 Outils Metriques CM E18soulaymane daifPas encore d'évaluation
- Présentation de La Formation RenaultDocument10 pagesPrésentation de La Formation Renaultsoulaymane daifPas encore d'évaluation
- Verine ShneiderDocument24 pagesVerine Shneidersoulaymane daifPas encore d'évaluation
- Sauvegarde PRMDocument6 pagesSauvegarde PRMsoulaymane daifPas encore d'évaluation
- See Electrical - Niveau 1Document488 pagesSee Electrical - Niveau 1soulaymane daifPas encore d'évaluation
- Formation LevelDDocument24 pagesFormation LevelDsoulaymane daifPas encore d'évaluation
- 6 - SAUVEGARDE ET RESTITUTION 3xxia Version Fanuc CNCDocument83 pages6 - SAUVEGARDE ET RESTITUTION 3xxia Version Fanuc CNCsoulaymane daifPas encore d'évaluation
- Colle 02Document2 pagesColle 02Hamed TraorePas encore d'évaluation
- 425 914 1 SMDocument10 pages425 914 1 SMkami ouachemPas encore d'évaluation
- Cours 4 Introduction À La Génomique 2021Document10 pagesCours 4 Introduction À La Génomique 2021fsxnsstoaehkbhlzygPas encore d'évaluation
- Trading Price Action TRENDSDocument53 pagesTrading Price Action TRENDSKOUASSI KOFFI JEAN DE CAPISTRANPas encore d'évaluation
- Exposé Réorganisation Du CapitalfinalDocument30 pagesExposé Réorganisation Du CapitalfinalAdil BentalebPas encore d'évaluation
- Fiche ROME BrasseurDocument5 pagesFiche ROME BrasseuryannplmrPas encore d'évaluation
- Plastiques TechniquesDocument1 pagePlastiques Techniquesbagueneau YOUTUBEPas encore d'évaluation
- Les Points Clé Pour Bien Écrire.Document60 pagesLes Points Clé Pour Bien Écrire.HanKethyaneth100% (1)
- La Motivation Des Élèves de Formation ProfessionnelleDocument22 pagesLa Motivation Des Élèves de Formation ProfessionnelleOlsen MalagaPas encore d'évaluation
- Projet PFE01Document127 pagesProjet PFE01soukaPas encore d'évaluation
- Pont Mixte FINALDocument26 pagesPont Mixte FINALĐíßMohammedRiadPas encore d'évaluation
- Osp 1168-35-4 La Notion de Projet en Psychologie de L OrientationDocument13 pagesOsp 1168-35-4 La Notion de Projet en Psychologie de L OrientationMus OubPas encore d'évaluation
- La Création de ValeurDocument68 pagesLa Création de Valeursene seydina mouhamedPas encore d'évaluation
- Sujet 2022Document4 pagesSujet 2022baha brahmiPas encore d'évaluation
- Ingénierie - Le Cycle en VDocument3 pagesIngénierie - Le Cycle en VbommobPas encore d'évaluation
- Registre D'élevage Gratuit Plateforme Du MielDocument12 pagesRegistre D'élevage Gratuit Plateforme Du Mielmas.eric34Pas encore d'évaluation
- NXO 5v7ds7NU PDFDocument69 pagesNXO 5v7ds7NU PDFChristophe GarnierPas encore d'évaluation
- Cours No 10-Ostèologie (Suite)Document7 pagesCours No 10-Ostèologie (Suite)Feriel FerielPas encore d'évaluation
- Fonction Convertir Machines Synchrones Triphases CoursDocument5 pagesFonction Convertir Machines Synchrones Triphases CoursdddddPas encore d'évaluation
- Finances Publiques - Raya ChoubaniDocument37 pagesFinances Publiques - Raya Choubaniمنير بعكةPas encore d'évaluation
- Ystème NerveuxDocument4 pagesYstème NerveuxRabab Tamouh0% (1)
- JumiaDocument3 pagesJumiakhalidPas encore d'évaluation
- Les Produits D EntretienDocument3 pagesLes Produits D EntretienSandrine CharinPas encore d'évaluation
- Elaboration Et Caracterisation Des Compo 20150413142733 582136Document5 pagesElaboration Et Caracterisation Des Compo 20150413142733 582136Fox FouPas encore d'évaluation
- 2les NavigateursDocument2 pages2les NavigateursImane TlmPas encore d'évaluation
- Le Marketing Digital Pour Les NulsDocument453 pagesLe Marketing Digital Pour Les NulsAMINEPas encore d'évaluation
- Théorie Des MachinesDocument20 pagesThéorie Des MachinesJeanne Varenne EmvutouPas encore d'évaluation
- French Gr5 Final RevDocument5 pagesFrench Gr5 Final Revezzeldin3khaterPas encore d'évaluation
- Exercices Is LM BPDocument6 pagesExercices Is LM BPDachka Ridore100% (1)
- Antoche 1497Document21 pagesAntoche 1497Flynders PetryePas encore d'évaluation