Vous aimerez peut-être aussi
- Interventions Sur Les AscenseursDocument22 pagesInterventions Sur Les AscenseurstourkiaPas encore d'évaluation
- TD D'automatismeDocument4 pagesTD D'automatismeSaf100% (2)
- td1 GrafcetDocument3 pagestd1 Grafcetmabroukoussema61Pas encore d'évaluation
- Application DevoirDocument5 pagesApplication DevoirHassan KamilPas encore d'évaluation
- Fiche 23 Le Grafcet Exercice 2Document7 pagesFiche 23 Le Grafcet Exercice 2joel ymegniPas encore d'évaluation
- Sujet EstDocument2 pagesSujet Estjosias zinsouPas encore d'évaluation
- Support Formation Grizzli 001Document15 pagesSupport Formation Grizzli 001abdelali.bajPas encore d'évaluation
- Exercices Sur Le GrafcetDocument7 pagesExercices Sur Le GrafcetEcouter le français100% (3)
- Cas de Franchissement.Document4 pagesCas de Franchissement.belgo007Pas encore d'évaluation
- Examens National 2bac Ste Sci Ingen 2010 N PDFDocument30 pagesExamens National 2bac Ste Sci Ingen 2010 N PDFHanane TounsiPas encore d'évaluation
- Groupe 3Document2 pagesGroupe 3josias zinsouPas encore d'évaluation
- Grafcet Elt 5 PDFDocument3 pagesGrafcet Elt 5 PDFnawzatPas encore d'évaluation
- Procedure de DepotageDocument8 pagesProcedure de Depotagekwame100% (1)
- SCR Guide QDDocument17 pagesSCR Guide QDhgille14Pas encore d'évaluation
- Exemple de LDocument6 pagesExemple de Lladabd2Pas encore d'évaluation
- Nopeu0206cc00 PDFDocument129 pagesNopeu0206cc00 PDFnjaka randrianantenainaPas encore d'évaluation
- Orona Procédure Dégagement Version ÉlectriqueDocument3 pagesOrona Procédure Dégagement Version ÉlectriqueJohn KeatsPas encore d'évaluation
- Devoir Némuro3Document11 pagesDevoir Némuro3Omar LamsyahPas encore d'évaluation
- Systeme de Lavage AUTOMATIQUE DE Véhicules: VerteDocument20 pagesSysteme de Lavage AUTOMATIQUE DE Véhicules: Vertejosias zinsouPas encore d'évaluation
- TP PortailDocument5 pagesTP PortailHyacinthe KOSSIPas encore d'évaluation
- Grafcet Avex Correction - 1Document34 pagesGrafcet Avex Correction - 1Fettah Guarnaoui100% (3)
- TD N2 AutomatismeDocument4 pagesTD N2 AutomatismeYouness Bakache100% (4)
- Carnet de Bord Peugeot 407Document142 pagesCarnet de Bord Peugeot 407pimbatomaPas encore d'évaluation
- Exercice de Sti Automatisme Bac BlancDocument5 pagesExercice de Sti Automatisme Bac BlancElmokh Lassaad0% (1)
- GRAFCETDocument24 pagesGRAFCETmonstersounds1Pas encore d'évaluation
- Serie 1Document3 pagesSerie 1c4fvqtrnc5Pas encore d'évaluation
- Modele de ContratDocument14 pagesModele de ContratBennecer Hasni0% (1)
- Mini ProjetDocument22 pagesMini ProjetANAS DAICHEPas encore d'évaluation
- Peugeot Partner Origin Notice Mode Emploi (2010)Document116 pagesPeugeot Partner Origin Notice Mode Emploi (2010)jsalvagaia86% (7)
- Série 2 Automatisme Avec CorrigéDocument11 pagesSérie 2 Automatisme Avec Corrigéamine milano100% (2)
- 10-TD G7 - Centrale HydrauliqueDocument2 pages10-TD G7 - Centrale HydrauliquesaulnierPas encore d'évaluation
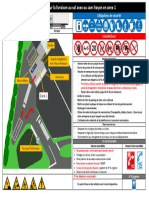
- 2021-10-25 Modèle de Panneau Consignes Pour Livraison Au Sol Avec Ou Sans Hayon en Zone 1Document1 page2021-10-25 Modèle de Panneau Consignes Pour Livraison Au Sol Avec Ou Sans Hayon en Zone 1manu.ledu56Pas encore d'évaluation
- Cagnes-sur-Mer Le 11 Avril 2018: Technologie Junior - Chapitre 11Document7 pagesCagnes-sur-Mer Le 11 Avril 2018: Technologie Junior - Chapitre 11Mohamed AbdelliPas encore d'évaluation
- 1.3 Correction Test Theorique Pilote N°1Document21 pages1.3 Correction Test Theorique Pilote N°1Vacea AntonioPas encore d'évaluation
- GRAFCET - Exercices Exercice 1 - Unité de PerçageDocument10 pagesGRAFCET - Exercices Exercice 1 - Unité de Perçagemehdi100% (2)
- Mini ProjetDocument3 pagesMini ProjetFakhreddine Okail67% (3)
- TP ApiDocument9 pagesTP ApiNouhaila AdbibPas encore d'évaluation
- 9-Guide Ascenseur PDFDocument23 pages9-Guide Ascenseur PDFBENSAAOUD100% (2)
- Paletticc - Les Differents DefautsDocument7 pagesPaletticc - Les Differents DefautsstefPas encore d'évaluation
- Manual de Taller Renault Clio II - 16 Consejos PracticosDocument16 pagesManual de Taller Renault Clio II - 16 Consejos PracticosCarlos Eberhardt RodriguezPas encore d'évaluation
- TD Auto 2 PDFDocument16 pagesTD Auto 2 PDFEdmond OuattaraPas encore d'évaluation
- TD 3 Automatismes IndustrielsDocument2 pagesTD 3 Automatismes IndustrielsBIJOUNA BILELPas encore d'évaluation
- TD3 - Automatisme IndustrielDocument7 pagesTD3 - Automatisme IndustrielFifi La MarionnettePas encore d'évaluation
- Dea Isp Mbuji Mayi Qs de Techn de Comm Peda 2022-2023Document12 pagesDea Isp Mbuji Mayi Qs de Techn de Comm Peda 2022-2023Papy KabeyaPas encore d'évaluation
- Réparation Et Maintenance: 1 - Pré-RequisDocument8 pagesRéparation Et Maintenance: 1 - Pré-RequisDaniel Peña VergaraPas encore d'évaluation
- TP 4 Chaine de Manutention Et de TraitementDocument2 pagesTP 4 Chaine de Manutention Et de Traitementousmane0% (2)
- Grafcet Elt 4 PDFDocument7 pagesGrafcet Elt 4 PDFnawzat80% (5)
- 9944 MC Tech Ascen E1 Dossier Tech 2015Document12 pages9944 MC Tech Ascen E1 Dossier Tech 2015Khalil BarhoumiPas encore d'évaluation
- CC Automatisme3 BTSCMFM2Document5 pagesCC Automatisme3 BTSCMFM2stephanePas encore d'évaluation
- Contrôle N2 TerminaleDocument3 pagesContrôle N2 Terminalejosias zinsouPas encore d'évaluation
- td4 Grafcet Avec SolutionDocument8 pagestd4 Grafcet Avec SolutionAmina Lazreg100% (1)
- Gestion de ParkingDocument2 pagesGestion de Parkinglahssane hmidat50% (2)
- NTK A4Document27 pagesNTK A4Yoda MoussaPas encore d'évaluation
- Rapport Immersion KBDocument3 pagesRapport Immersion KBKoulako KouroumaPas encore d'évaluation
- UntitledDocument6 pagesUntitledEmilie mayadaPas encore d'évaluation
- Exercices Grafcet 2 STSDocument7 pagesExercices Grafcet 2 STSsaulnierPas encore d'évaluation
- Exercice 1: Déplacement D'un Wagonnet: Savoir M303 Commande Des Machines Par API Activité: TD TD: GrafcetDocument4 pagesExercice 1: Déplacement D'un Wagonnet: Savoir M303 Commande Des Machines Par API Activité: TD TD: GrafcetAbdelhadi AZPas encore d'évaluation
- Assistance Pour Le Maniement de Charges Dans L'industrie: I Présentation Du SystèmeDocument10 pagesAssistance Pour Le Maniement de Charges Dans L'industrie: I Présentation Du SystèmeyoussefPas encore d'évaluation
- Lydex Planning Entretien Profs 2020Document3 pagesLydex Planning Entretien Profs 2020youssefPas encore d'évaluation
- Correction TD StabilitéDocument13 pagesCorrection TD StabilitéyoussefPas encore d'évaluation
- TD Régime SinusoidalDocument2 pagesTD Régime SinusoidalyoussefPas encore d'évaluation
- Exo Transfo TriphaséDocument1 pageExo Transfo TriphaséyoussefPas encore d'évaluation
- Exercices CAN CNADocument2 pagesExercices CAN CNAyoussefPas encore d'évaluation
- Exo Transfo Triphasé 2021Document3 pagesExo Transfo Triphasé 2021youssefPas encore d'évaluation
- Chap 22 ConversionDocument11 pagesChap 22 ConversionyoussefPas encore d'évaluation
- Convention Sur Le Contrat D'engagement Des Marins, 1926Document1 pageConvention Sur Le Contrat D'engagement Des Marins, 1926youssefPas encore d'évaluation
- Travail Abord EnginsDocument2 pagesTravail Abord EnginsLuc ConcentraitPas encore d'évaluation
- Depose Repose MoteurDocument9 pagesDepose Repose MoteurBertrandPas encore d'évaluation
- JPM Sud 2022Document46 pagesJPM Sud 2022Petit MessaPas encore d'évaluation
- Gestion CourrierDocument85 pagesGestion CourrierPatrick Vivian NGOAMBEPas encore d'évaluation
- Cotação de Preços.w20eDocument230 pagesCotação de Preços.w20ejulliaPas encore d'évaluation
- Confirmation de Reservation - RCIIUJDocument4 pagesConfirmation de Reservation - RCIIUJabdellaoui haythemPas encore d'évaluation
- Chastagner Catalogue Location 850Document100 pagesChastagner Catalogue Location 850ChatrainPas encore d'évaluation
- Cours de Routes Détaillés LOKO 2021 M AKA L2Document40 pagesCours de Routes Détaillés LOKO 2021 M AKA L2baiPas encore d'évaluation
- Email Confirmation Preview2 DoDocument2 pagesEmail Confirmation Preview2 Doertgtrshg eththgPas encore d'évaluation
- NBN B 03-004 2017 PreviewDocument7 pagesNBN B 03-004 2017 PreviewFoucauld FalguerollesPas encore d'évaluation
- Gestion Des Transports Conteneurisés PDFDocument134 pagesGestion Des Transports Conteneurisés PDFKokou Defly73% (11)
- Exercice:HYDRAULIQUEDocument6 pagesExercice:HYDRAULIQUEazzeddine eddhahraouy20Pas encore d'évaluation
- La Douane de Logistique InternationleDocument3 pagesLa Douane de Logistique InternationleMahamed AminPas encore d'évaluation
- Analyse Du Trafic RoutierDocument28 pagesAnalyse Du Trafic RoutierElhadji Mayacine NguiranePas encore d'évaluation
- Pascal PobaDocument6 pagesPascal Pobab47n2ygpmpPas encore d'évaluation
- L'Oeil Noir - MdA 1 - Vers Un Nouveau MondeDocument49 pagesL'Oeil Noir - MdA 1 - Vers Un Nouveau MondeCédric Ducloux100% (1)
- Pont ST Michel ToulouseDocument19 pagesPont ST Michel ToulouseMounir RIACHEPas encore d'évaluation
- Cerema Coestra Rapport Detude 2020Document72 pagesCerema Coestra Rapport Detude 2020Dama DamaPas encore d'évaluation
- Les Procédures de Shipping: Entreprise D'accueil: K.DAMAK Shipping Company S.ADocument43 pagesLes Procédures de Shipping: Entreprise D'accueil: K.DAMAK Shipping Company S.AJr BieberPas encore d'évaluation
- Tribune de Bruxelles 240Document32 pagesTribune de Bruxelles 240Rafik BouhahaPas encore d'évaluation
- Casa TramwayDocument17 pagesCasa TramwayMaouhoub Anas100% (1)
- Définition Epreuve TP DIAGNOSTIC ET REPARATION DES SYSTEMES ELECTRIQUES PBT - MVTDocument2 pagesDéfinition Epreuve TP DIAGNOSTIC ET REPARATION DES SYSTEMES ELECTRIQUES PBT - MVTMichelPas encore d'évaluation
- Ms - Eln.ben Ghedire+BenbouzidDocument95 pagesMs - Eln.ben Ghedire+Benbouzidlamine fayPas encore d'évaluation
- Pierre Fayet Modélisation Des Réseaux Électriques Ferroviaires Alimentés en Courant Alternatif PDFDocument251 pagesPierre Fayet Modélisation Des Réseaux Électriques Ferroviaires Alimentés en Courant Alternatif PDFHaider SadaouiPas encore d'évaluation
- La Mort d' Olivier Bécaille - Émile ZolaDocument11 pagesLa Mort d' Olivier Bécaille - Émile ZolaLuxPas encore d'évaluation
- (S7M) Compendium de ReglesDocument45 pages(S7M) Compendium de ReglesMarmotte CarnivorePas encore d'évaluation
- Jeu de Dés - Le Train Des OpérationsDocument8 pagesJeu de Dés - Le Train Des OpérationsMarie LéonardPas encore d'évaluation
- TD Chap7 ParetoDocument2 pagesTD Chap7 ParetoHaythem JemaiPas encore d'évaluation
- Nouveau Rapport Corrigé Le DalotDocument30 pagesNouveau Rapport Corrigé Le DalotFOUMAN Justin100% (19)
- Revue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteD'EverandRevue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteÉvaluation : 3 sur 5 étoiles3/5 (3)
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- Dark Python : Apprenez à créer vos outils de hacking.D'EverandDark Python : Apprenez à créer vos outils de hacking.Évaluation : 3 sur 5 étoiles3/5 (1)
- Apprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationD'EverandApprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationPas encore d'évaluation
- Le guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandLe guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 5 sur 5 étoiles5/5 (2)
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Le Guide Rapide Du Cloud Computing Et De La CybersécuritéD'EverandLe Guide Rapide Du Cloud Computing Et De La CybersécuritéPas encore d'évaluation
- Conception & Modélisation CAO: Le guide ultime du débutantD'EverandConception & Modélisation CAO: Le guide ultime du débutantPas encore d'évaluation
- Le money management facile à apprendre: Comment tirer profit des techniques et stratégies de gestion de l'argent pour améliorer l'activité de trading en ligneD'EverandLe money management facile à apprendre: Comment tirer profit des techniques et stratégies de gestion de l'argent pour améliorer l'activité de trading en ligneÉvaluation : 3 sur 5 étoiles3/5 (3)
- L'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.D'EverandL'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.Évaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- Dans l'esprit des grand investisseurs: Un voyage à la découverte de la psychologie utilisée par les plus grands investisseurs de tous les temps à travers des analyses opérationnellD'EverandDans l'esprit des grand investisseurs: Un voyage à la découverte de la psychologie utilisée par les plus grands investisseurs de tous les temps à travers des analyses opérationnellÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Python Offensif : Le guide du débutant pour apprendre les bases du langage Python et créer des outils de hacking.D'EverandPython Offensif : Le guide du débutant pour apprendre les bases du langage Python et créer des outils de hacking.Pas encore d'évaluation
- Stratégie d'Investissement en Crypto-monnaie: Comment Devenir Riche Avec les Crypto-monnaiesD'EverandStratégie d'Investissement en Crypto-monnaie: Comment Devenir Riche Avec les Crypto-monnaiesÉvaluation : 3.5 sur 5 étoiles3.5/5 (11)
- Comment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.D'EverandComment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.Pas encore d'évaluation
- Marketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxD'EverandMarketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxPas encore d'évaluation
- La communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseD'EverandLa communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseÉvaluation : 5 sur 5 étoiles5/5 (1)
- Création d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileD'EverandCréation d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)