Vous aimerez peut-être aussi
- Automatique: Les Grands Articles d'UniversalisD'EverandAutomatique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Polycopie APIDocument18 pagesPolycopie APIMycompte HukkersPas encore d'évaluation
- TD Grafcet PDFDocument10 pagesTD Grafcet PDFlahssane hmidatPas encore d'évaluation
- TD GrafcetDocument10 pagesTD GrafcetBOUALAOUIPas encore d'évaluation
- Serie Exercice GrafcetDocument9 pagesSerie Exercice Grafcetkima lachgar100% (3)
- Exos GrafcetDocument26 pagesExos GrafcetRuben Yav100% (2)
- 05 - Exercices GRafcetDocument4 pages05 - Exercices GRafcetBorhèn Oussai79% (19)
- Machine A Remplir Et A BoucherDocument17 pagesMachine A Remplir Et A BoucherIbra YAACOUBIPas encore d'évaluation
- ExerDocument15 pagesExermbou chancellePas encore d'évaluation
- Exercices Sur GrafcetDocument27 pagesExercices Sur Grafcetsamer matoussiPas encore d'évaluation
- Exercice 1: Déplacement D'un Wagonnet: Savoir M303 Commande Des Machines Par API Activité: TD TD: GrafcetDocument4 pagesExercice 1: Déplacement D'un Wagonnet: Savoir M303 Commande Des Machines Par API Activité: TD TD: GrafcetAbdelhadi AZPas encore d'évaluation
- 3 Le Grafcet PDFDocument8 pages3 Le Grafcet PDFGenie MecaPas encore d'évaluation
- Exercice GRAFCET DUT 2019 Serie 1 PDFDocument4 pagesExercice GRAFCET DUT 2019 Serie 1 PDFAstou FallPas encore d'évaluation
- Grafcet Avec Choix de Séquences Exercices Corrigés - CopieDocument22 pagesGrafcet Avec Choix de Séquences Exercices Corrigés - CopieAris ABOUGHEPas encore d'évaluation
- Exercices GrafcetDocument3 pagesExercices GrafcetRami DiabPas encore d'évaluation
- Leçon 1Document6 pagesLeçon 1josias zinsouPas encore d'évaluation
- GRAFCETDocument24 pagesGRAFCETmonstersounds1Pas encore d'évaluation
- 10-TD G7 - Centrale HydrauliqueDocument2 pages10-TD G7 - Centrale HydrauliquesaulnierPas encore d'évaluation
- Cahier de Charger Automat Corrige Ouchada AbdelhadiDocument90 pagesCahier de Charger Automat Corrige Ouchada AbdelhadiEl mrtb hamza100% (4)
- 05exercices GrafcetDocument4 pages05exercices Grafcetnajlae alfathiPas encore d'évaluation
- Mini ProjetDocument22 pagesMini ProjetANAS DAICHEPas encore d'évaluation
- Grafcet Elt 5 PDFDocument3 pagesGrafcet Elt 5 PDFnawzatPas encore d'évaluation
- TD CpiDocument6 pagesTD CpiPatrick Juvet Gnetchejo100% (1)
- Mini ProjetDocument3 pagesMini ProjetFakhreddine Okail67% (3)
- Exercices 103031Document2 pagesExercices 103031Ta RekPas encore d'évaluation
- TD GrafcetDocument10 pagesTD GrafcetMaissa Messi67% (3)
- td4 Grafcet Avec SolutionDocument8 pagestd4 Grafcet Avec SolutionAmina Lazreg100% (1)
- TD - GRAFCET - TextMarkDocument36 pagesTD - GRAFCET - TextMarkWafa BenzaouiPas encore d'évaluation
- 3 Le GrafcetDocument13 pages3 Le GrafcetkldmntPas encore d'évaluation
- Matérialisation Du GRAFCETDocument19 pagesMatérialisation Du GRAFCETÁł ÃăPas encore d'évaluation
- 111Document7 pages111abderrahim kassimi100% (1)
- 9-Exercices Sur Le GRAFCET PDFDocument7 pages9-Exercices Sur Le GRAFCET PDFdjelbou100% (1)
- Exercices Sur Le GrafcetDocument7 pagesExercices Sur Le GrafcetEcouter le français100% (3)
- TD 2Document4 pagesTD 2Lamrani MohamedPas encore d'évaluation
- API RapportDocument18 pagesAPI RapportAchraf El aouamePas encore d'évaluation
- Automatismes Industriels CC 2015 2016Document5 pagesAutomatismes Industriels CC 2015 2016Youssef RagraguiPas encore d'évaluation
- 03 Chapitre 1Document5 pages03 Chapitre 1Firas FirasPas encore d'évaluation
- TD 1 - R110 - Représentation Dune Fonction LogiqueDocument4 pagesTD 1 - R110 - Représentation Dune Fonction LogiqueDABAKH LDEEBOYPas encore d'évaluation
- Serie 1Document3 pagesSerie 1c4fvqtrnc5Pas encore d'évaluation
- Serie1 TPs AutomatismesDocument4 pagesSerie1 TPs AutomatismesIbr FoutPas encore d'évaluation
- TD D'automatismeDocument4 pagesTD D'automatismeSaf100% (2)
- Examen APIDocument4 pagesExamen APIHana Khemissi100% (1)
- Application DevoirDocument5 pagesApplication DevoirHassan KamilPas encore d'évaluation
- GE-T.LANTRI-Automates Programmables Industriels (API) - TP5 - API - L3 - AUTO-L3-S6Document2 pagesGE-T.LANTRI-Automates Programmables Industriels (API) - TP5 - API - L3 - AUTO-L3-S6Rabah Amidi100% (1)
- Poly TD SAPDocument18 pagesPoly TD SAPOussama BeddaPas encore d'évaluation
- EST Tle F3Document3 pagesEST Tle F3josias zinsouPas encore d'évaluation
- 2 ApiDocument34 pages2 ApiFogape Titi100% (1)
- Le GrafcetDocument14 pagesLe Grafcetmansour leyePas encore d'évaluation
- TD 30 - Représentation D'une Fonction Logique PDFDocument4 pagesTD 30 - Représentation D'une Fonction Logique PDFbhs channelPas encore d'évaluation
- Poly TD API PDFDocument10 pagesPoly TD API PDFKhadija HajadePas encore d'évaluation
- Chaine DembouteillageDocument4 pagesChaine DembouteillageYOUNES KABBAJPas encore d'évaluation
- TD3 Pa-ApiDocument4 pagesTD3 Pa-Apiismail.moussaPas encore d'évaluation
- Travaux Dirigés PDFDocument9 pagesTravaux Dirigés PDFmarwen0% (2)
- Art13-4 5Document12 pagesArt13-4 5Papy KabeyaPas encore d'évaluation
- Dédicace: Etude Conception Et Realisation D'un Systeme de Gestion de L'énergie Dans Le BatimentDocument44 pagesDédicace: Etude Conception Et Realisation D'un Systeme de Gestion de L'énergie Dans Le BatimentPapy KabeyaPas encore d'évaluation
- Cours de Labo EtroDocument15 pagesCours de Labo EtroPapy KabeyaPas encore d'évaluation
- AVANTPROPOS Avant Propos - PDF 1708260829894Document1 pageAVANTPROPOS Avant Propos - PDF 1708260829894Papy KabeyaPas encore d'évaluation
- Etude Et Réalisation D'un Système de Gestion de L'énergieDocument2 pagesEtude Et Réalisation D'un Système de Gestion de L'énergiePapy KabeyaPas encore d'évaluation
- Cours de Premier Cycle en Génie Électrique Et en Génie InformatiqueDocument21 pagesCours de Premier Cycle en Génie Électrique Et en Génie InformatiquePapy KabeyaPas encore d'évaluation
- Cours de La Regulation Et TelecommunicationsDocument24 pagesCours de La Regulation Et TelecommunicationsPapy KabeyaPas encore d'évaluation
- Shico ZANDI-MANGUMBE, Cours de Système Des Télécoms L2 ISPT-Kin 2019 FINALDocument322 pagesShico ZANDI-MANGUMBE, Cours de Système Des Télécoms L2 ISPT-Kin 2019 FINALPapy KabeyaPas encore d'évaluation
- Cours de Physique de S-CDocument20 pagesCours de Physique de S-CPapy KabeyaPas encore d'évaluation
- Cours Et Exercices Corrigés en RéseauDocument16 pagesCours Et Exercices Corrigés en RéseauPapy KabeyaPas encore d'évaluation
- Informations Psychopedagogiques Spécialisées DEA Version Finale - 111640Document21 pagesInformations Psychopedagogiques Spécialisées DEA Version Finale - 111640Papy Kabeya100% (1)
- Rapport Formation Des Trinomes Ou Briefing de RecadracageDocument28 pagesRapport Formation Des Trinomes Ou Briefing de RecadracagePapy KabeyaPas encore d'évaluation
- Article Sylvain ReseauxDocument14 pagesArticle Sylvain ReseauxPapy KabeyaPas encore d'évaluation
- Cours de Labo I Par Daniel Tshibaka (Ultimate)Document89 pagesCours de Labo I Par Daniel Tshibaka (Ultimate)Papy KabeyaPas encore d'évaluation
- Fondation Nseya Tshibangu Biay 3Document2 pagesFondation Nseya Tshibangu Biay 3Papy KabeyaPas encore d'évaluation
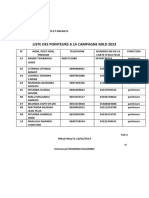
- Liste de Pointeurs MILD2023Document1 pageListe de Pointeurs MILD2023Papy KabeyaPas encore d'évaluation
- Exercices Sur Le Chapitre 4Document2 pagesExercices Sur Le Chapitre 4Papy KabeyaPas encore d'évaluation
- Cours de La Reglementation Et Telecommunications G3 Radio ISTADocument21 pagesCours de La Reglementation Et Telecommunications G3 Radio ISTAPapy KabeyaPas encore d'évaluation
- Projet NOUR Note Technique Sur Le Prepaiement ElectriqueDocument5 pagesProjet NOUR Note Technique Sur Le Prepaiement ElectriquePapy KabeyaPas encore d'évaluation
- Fonctionement Du Transistor BipolaireDocument2 pagesFonctionement Du Transistor BipolairePapy KabeyaPas encore d'évaluation
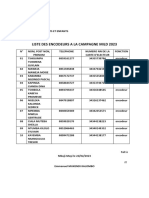
- Liste Des Encodeurs Mild2023Document1 pageListe Des Encodeurs Mild2023Papy KabeyaPas encore d'évaluation
- Production Mecanique: Cours deDocument111 pagesProduction Mecanique: Cours deAhmed KanounPas encore d'évaluation
- 31 05 11les Machines A Bois StationnairesDocument14 pages31 05 11les Machines A Bois StationnairesHassan AzmiPas encore d'évaluation
- Red Days 10 22Document16 pagesRed Days 10 22Ahmed DrabliPas encore d'évaluation
- Programme 2020 RC FRDocument19 pagesProgramme 2020 RC FRalexelimoPas encore d'évaluation
- Guide Fraisage - Outils PDFDocument156 pagesGuide Fraisage - Outils PDFMohamed SahilPas encore d'évaluation
- Far Tools DPB 25E Drill PressDocument57 pagesFar Tools DPB 25E Drill PressantipeurPas encore d'évaluation
- Axe Contrats de PhaseDocument3 pagesAxe Contrats de PhaseYoussef NajihPas encore d'évaluation
- Cntrat de Phase 500Document2 pagesCntrat de Phase 500Ismail OularbiPas encore d'évaluation
- Examen Coupe IFM Janvier 2021 VFDocument6 pagesExamen Coupe IFM Janvier 2021 VFعامر الشعيلي ولد شعبانPas encore d'évaluation
- Rapport de Diagnostic Technique de L État Physique. La Maison Du ContrôleurDocument22 pagesRapport de Diagnostic Technique de L État Physique. La Maison Du ContrôleurwajdiPas encore d'évaluation
- Examen À Distance de TP MécaniqueDocument5 pagesExamen À Distance de TP MécaniqueFatima Zahra AmalouPas encore d'évaluation
- MinimalisteDocument12 pagesMinimalisteyoussef khamlichiPas encore d'évaluation
- Realiser Ais FerresDocument2 pagesRealiser Ais FerresbarzoidraxPas encore d'évaluation
- Le Bois Industriel en BTP Par: Loubna Lahnin Assia BelarouiDocument17 pagesLe Bois Industriel en BTP Par: Loubna Lahnin Assia Belarouime lioPas encore d'évaluation
- RectifieuseDocument5 pagesRectifieuseDanu Tarca100% (5)
- Designation Unite Quantite Prix Unitaire MontantDocument6 pagesDesignation Unite Quantite Prix Unitaire Montantimmocontrol internationan225Pas encore d'évaluation
- Fta MTP fr2Document14 pagesFta MTP fr2CCN BTPPas encore d'évaluation
- Unite Automatique de PercageDocument4 pagesUnite Automatique de Percagesono awtar AHSLPas encore d'évaluation
- PROG Planche Decouper CN ROVER A 5 AXESDocument20 pagesPROG Planche Decouper CN ROVER A 5 AXESdofyifilmePas encore d'évaluation
- Cours Chap1 Cycles D'usinage Tournage S4 2016-2017 V2Document24 pagesCours Chap1 Cycles D'usinage Tournage S4 2016-2017 V2youssefabdelkalakPas encore d'évaluation
- Perceuse À Percussion: Instructions D'OrigineDocument28 pagesPerceuse À Percussion: Instructions D'OriginesyvillageoisPas encore d'évaluation
- Man Det Cr10Document13 pagesMan Det Cr10sdfzqsdfPas encore d'évaluation
- Le Sciage À La Scie À Ruban: 1) Fonction de La MachineDocument6 pagesLe Sciage À La Scie À Ruban: 1) Fonction de La Machinerufin rufin rufin100% (1)
- Devoir de Construction MécaniqueDocument6 pagesDevoir de Construction Mécaniquegildas assoumou allogoPas encore d'évaluation
- (AQCEN) - EC5 GT5 Règles Et Recommandations Particulières Applicables Aux Structures en Poutres en IDocument55 pages(AQCEN) - EC5 GT5 Règles Et Recommandations Particulières Applicables Aux Structures en Poutres en IPatrick Saint-LouisPas encore d'évaluation
- Livret6 Outillages Et MatériauxDocument33 pagesLivret6 Outillages Et MatériauxPerotPas encore d'évaluation
- Procédure Purges AncragesDocument8 pagesProcédure Purges AncragesVirane DantonPas encore d'évaluation
- GSE 4 Grand Sabot A Ailes Exterieures 1Document22 pagesGSE 4 Grand Sabot A Ailes Exterieures 1NQT243Pas encore d'évaluation
- Ressource Pro 12667Document3 pagesRessource Pro 12667renaud LPas encore d'évaluation
- Gamme D Usinage de La Piece 2Document3 pagesGamme D Usinage de La Piece 2Med Amine HattakiPas encore d'évaluation
- Le café vert - un moyen durable pour perdre du poids?: Comment vous pouvez perdre rapidement et facilement du poids avec le café vertD'EverandLe café vert - un moyen durable pour perdre du poids?: Comment vous pouvez perdre rapidement et facilement du poids avec le café vertPas encore d'évaluation
- Longboard Dancing - Figures et Pas de Danse - RegularD'EverandLongboard Dancing - Figures et Pas de Danse - RegularPas encore d'évaluation
- Régime de café vert: L'Ultime Brûleur de Graisse: Le Traitement pour l'Obésité, le Diabète de Type 2 et l'HypertensionD'EverandRégime de café vert: L'Ultime Brûleur de Graisse: Le Traitement pour l'Obésité, le Diabète de Type 2 et l'HypertensionPas encore d'évaluation