Vous aimerez peut-être aussi
- Chapitre 5Document6 pagesChapitre 5abdeslamPas encore d'évaluation
- Cours mecaIII - 2014 2 PDFDocument83 pagesCours mecaIII - 2014 2 PDFazzamPas encore d'évaluation
- 6 Ici 26 F Od NBQGH BJMGe KM JTF 8 Zy 8 W SPXW K0 La YKJDocument42 pages6 Ici 26 F Od NBQGH BJMGe KM JTF 8 Zy 8 W SPXW K0 La YKJayoubbenali281Pas encore d'évaluation
- Mec2 ENSADocument15 pagesMec2 ENSAKPETSIPas encore d'évaluation
- L2S3 MecaSol FormulaireDocument7 pagesL2S3 MecaSol FormulaireDaoud El CaidPas encore d'évaluation
- Chapitre 3 Systeme MecaniqueDocument12 pagesChapitre 3 Systeme MecaniquemzoughiPas encore d'évaluation
- 5 - Théorie Des Mécanismes - Approche StatiqueDocument20 pages5 - Théorie Des Mécanismes - Approche Statiqueoumaima oumennanaPas encore d'évaluation
- Liaisons EquivalDocument5 pagesLiaisons EquivalKamel BousninaPas encore d'évaluation
- Hyperstatisme ResumeDocument3 pagesHyperstatisme ResumeSaid OubariPas encore d'évaluation
- 17 Cinematique IIDocument13 pages17 Cinematique IIInes BaazizPas encore d'évaluation
- Fiche PuissancesDocument6 pagesFiche Puissancesayoub elPas encore d'évaluation
- Modélisation Des Mécanismes Et Liaisons ÉquivalentesDocument24 pagesModélisation Des Mécanismes Et Liaisons Équivalentesmahmoud bensassiPas encore d'évaluation
- DS Mécanique S.N 21-23Document9 pagesDS Mécanique S.N 21-23cool clipsPas encore d'évaluation
- DS1 Mécanique 2016-2017Document3 pagesDS1 Mécanique 2016-2017ssèf yøuPas encore d'évaluation
- 2 Cours de Mécanique Analytique Et VibrationsDocument83 pages2 Cours de Mécanique Analytique Et Vibrationsfounè diassanaPas encore d'évaluation
- Hyperstatisme Et Mobilité: Liaisons en ParallèleDocument11 pagesHyperstatisme Et Mobilité: Liaisons en ParallèleMohamed OuaggaPas encore d'évaluation
- TD 4Document2 pagesTD 43freefire 3gamePas encore d'évaluation
- Systemes Isostatiques PDFDocument5 pagesSystemes Isostatiques PDFImmamHadramyPas encore d'évaluation
- Seance3 StatiqueDocument13 pagesSeance3 StatiqueAdje EKLOUPas encore d'évaluation
- CNC 2008 MP Physique 2 CorrigeDocument17 pagesCNC 2008 MP Physique 2 CorrigeSara SerboutPas encore d'évaluation
- TD CinemaDocument3 pagesTD Cinemamoise moyePas encore d'évaluation
- PDF Chariot SujetDocument2 pagesPDF Chariot SujetAbdelali YacoubiPas encore d'évaluation
- TD Mecanique Generale l2 - FasciculeDocument14 pagesTD Mecanique Generale l2 - FasciculeBachirou GUEYEPas encore d'évaluation
- 7résumé 1 Du Mécanique Du SolideDocument8 pages7résumé 1 Du Mécanique Du SolidehajarPas encore d'évaluation
- Exam Smp4 SN 2012Document2 pagesExam Smp4 SN 2012Mahfoud Zaki100% (1)
- Formulaire MQIIDocument5 pagesFormulaire MQIIahmedPas encore d'évaluation
- Exo M閏anique Du PointDocument4 pagesExo M閏anique Du PointLoundou ortegaPas encore d'évaluation
- Chapitre 1 Mecanique Des SolidesDocument13 pagesChapitre 1 Mecanique Des SolidesMohamed KrichenPas encore d'évaluation
- X Ens MP 2019 Physique Si SujetDocument15 pagesX Ens MP 2019 Physique Si SujetSohaib EL KARMIPas encore d'évaluation
- Mécanique Du SolideDocument14 pagesMécanique Du SolideAhmad ElhamriPas encore d'évaluation
- DM 2020 L2spiDocument4 pagesDM 2020 L2spiMohammed RguiyegPas encore d'évaluation
- TD MTH228Document2 pagesTD MTH228Felix AFEKUPas encore d'évaluation
- TP 1Document8 pagesTP 1Amoul DhahriPas encore d'évaluation
- 9 Chapitre 5 Notions de LiaisonsDocument4 pages9 Chapitre 5 Notions de LiaisonsLaila BelPas encore d'évaluation
- ELCIN - 40 Oscillateur A Resistance Negative Avec RLC SerieDocument4 pagesELCIN - 40 Oscillateur A Resistance Negative Avec RLC Seriesih emPas encore d'évaluation
- Serie4 PC2Document2 pagesSerie4 PC2fredericcoutignoPas encore d'évaluation
- Effort Dans Les Plaques PDFDocument11 pagesEffort Dans Les Plaques PDFchouidiPas encore d'évaluation
- FormulaireDocument3 pagesFormulaireCəvahir AğazadəPas encore d'évaluation
- Cours MagnetostatiqueDocument32 pagesCours Magnetostatiquelilia Bennaceur FarahPas encore d'évaluation
- Corrige Examen S5 CHTheor Janv 2016Document12 pagesCorrige Examen S5 CHTheor Janv 2016Mohamed sadik50% (2)
- Banque E3A E4A 2019 MP Mathématiques 2 CaDocument4 pagesBanque E3A E4A 2019 MP Mathématiques 2 Caidk youPas encore d'évaluation
- So CorrigeDocument30 pagesSo CorrigeAbdeljalil LoudainiPas encore d'évaluation
- Corrige TD Application InductionDocument15 pagesCorrige TD Application InductionHoussam BenkerroumPas encore d'évaluation
- Transformation de Mouvement Par Liaison HélicoïdaleDocument10 pagesTransformation de Mouvement Par Liaison HélicoïdaleABDELKARIM AMINEPas encore d'évaluation
- Calcul de Distance Par La Norme de SchurDocument8 pagesCalcul de Distance Par La Norme de SchurKawtar FatihPas encore d'évaluation
- Calcul de Distance Par La Norme de SchurDocument8 pagesCalcul de Distance Par La Norme de SchurESSANY MOHAMMEDPas encore d'évaluation
- Serie 5Document6 pagesSerie 5MohamedBenKacemPas encore d'évaluation
- Rappel 1 Ière AnnéeDocument4 pagesRappel 1 Ière AnnéeAhmed fattoumPas encore d'évaluation
- Chap12 Root LocusDocument9 pagesChap12 Root Locusnasrokungfu0% (1)
- Modélisation Des Solides DéformablesDocument6 pagesModélisation Des Solides DéformablesAmiNEPas encore d'évaluation
- Controle Jan 2014Document2 pagesControle Jan 2014HossamEddinPas encore d'évaluation
- 1DS2 MpsiDocument8 pages1DS2 MpsiIkram ElPas encore d'évaluation
- Devoir1 23 24Document3 pagesDevoir1 23 24NAJIM SOUADPas encore d'évaluation
- Cours de DiffractionDocument13 pagesCours de DiffractionmokhtarPas encore d'évaluation
- Tensor para o TrabalhoDocument95 pagesTensor para o TrabalhoAnastasiaPas encore d'évaluation
- S2 TD 6 OperateursDocument2 pagesS2 TD 6 OperateursMike NkouetchaPas encore d'évaluation
- Algebre Lineaire Ensembles Usuels de Matrices Matrices SymetriquesDocument12 pagesAlgebre Lineaire Ensembles Usuels de Matrices Matrices SymetriquesSafaa KahilPas encore d'évaluation
- Endomorphismes Des Espaces EuclidiensDocument47 pagesEndomorphismes Des Espaces EuclidiensNadaPas encore d'évaluation
- CF 14-15 MaDocument2 pagesCF 14-15 MaadilbourejylahPas encore d'évaluation
- Chapitre4 DiapoDocument115 pagesChapitre4 DiapoabdeslamPas encore d'évaluation
- Chapitre 4Document10 pagesChapitre 4abdeslamPas encore d'évaluation
- Chapitre 6Document3 pagesChapitre 6abdeslamPas encore d'évaluation
- TD NumériqueDocument6 pagesTD Numériqueabdeslam100% (1)
- Effet D'un Filtre Sur Un Signal PériodiqueDocument75 pagesEffet D'un Filtre Sur Un Signal PériodiqueabdeslamPas encore d'évaluation
- Composition en Frequence Signal PeriodiqueDocument65 pagesComposition en Frequence Signal PeriodiqueabdeslamPas encore d'évaluation
- Motores SumergiblesDocument56 pagesMotores Sumergiblesmartin.rubenPas encore d'évaluation
- Série 6Document2 pagesSérie 6قثص67% (3)
- M24 Analyse circuit pneum أ©lectropneumatiq-GE-EMIDocument169 pagesM24 Analyse circuit pneum أ©lectropneumatiq-GE-EMIhavoc2012Pas encore d'évaluation
- Chapitre Circuit Magnétique ELTF2Document16 pagesChapitre Circuit Magnétique ELTF2MohandRahimPas encore d'évaluation
- Epreuve PHYSIQUE 1ere C D E & TI 2023 04 03 14 33 36Document2 pagesEpreuve PHYSIQUE 1ere C D E & TI 2023 04 03 14 33 36Bayekanathan Bayeka100% (2)
- CEM Ds Les Alimentations A Decoupage ZDocument18 pagesCEM Ds Les Alimentations A Decoupage Zberkane chrifaPas encore d'évaluation
- Commande Vect Syn Asy INSA LyonDocument74 pagesCommande Vect Syn Asy INSA LyonBALLOUK Soufiane100% (1)
- TSP1SP2Ch6T3-exo p174 n15 CorrectionDocument1 pageTSP1SP2Ch6T3-exo p174 n15 CorrectionCheujeu chaldouPas encore d'évaluation
- Guide de Révision de PhysiqueDocument30 pagesGuide de Révision de PhysiqueNabila SedjeniPas encore d'évaluation
- Cours Le Poids Et La Masse Prof - Sohofi (WWW - Pc1.ma)Document2 pagesCours Le Poids Et La Masse Prof - Sohofi (WWW - Pc1.ma)Prince Abdoo100% (1)
- Loi DohmDocument14 pagesLoi DohmsarahPas encore d'évaluation
- RGIE Et Normalisation - 2008 - v1 PDFDocument172 pagesRGIE Et Normalisation - 2008 - v1 PDFlazharPas encore d'évaluation
- Epreuve 1Document6 pagesEpreuve 1ChristianPas encore d'évaluation
- Meca Serie3Document8 pagesMeca Serie3Adnane XaviestaPas encore d'évaluation
- Handbook - RDM, Mécanique Des Fluides, Thermodynamique (Dunod, 1996, 255P)Document255 pagesHandbook - RDM, Mécanique Des Fluides, Thermodynamique (Dunod, 1996, 255P)racha100% (3)
- Chapi1 - Eléctricité Loi de ColombDocument3 pagesChapi1 - Eléctricité Loi de ColombAbdellah Benami0% (1)
- Serie Revision Les Oscillateurs Electriques MR Mtibaa - PDF Chap 3 Sfax PDFDocument21 pagesSerie Revision Les Oscillateurs Electriques MR Mtibaa - PDF Chap 3 Sfax PDFBoulbaba RebeiPas encore d'évaluation
- Exo Corrige MCC FsDocument20 pagesExo Corrige MCC FsDama DiawaradamaPas encore d'évaluation
- Convertisseur de Tension CC de 12v Jusqu'à 28vDocument5 pagesConvertisseur de Tension CC de 12v Jusqu'à 28vRawand MaemounPas encore d'évaluation
- Cours C 1.1 MASDocument6 pagesCours C 1.1 MASDaniro DegboePas encore d'évaluation
- Chapitre 2 PhysiqueDocument4 pagesChapitre 2 PhysiqueMoetez FellahPas encore d'évaluation
- Electrotechnique 2 GET - Chap III - Machine SynchroneDocument13 pagesElectrotechnique 2 GET - Chap III - Machine Synchronerajaa latifiPas encore d'évaluation
- 5-MCC Corr PDFDocument8 pages5-MCC Corr PDFAbdenour BenhalimaPas encore d'évaluation
- Lecon 2 Énergie Mécanique - OdtDocument6 pagesLecon 2 Énergie Mécanique - OdtAuray VilaynardPas encore d'évaluation
- Fga Phy-5062-2 Sa1Document11 pagesFga Phy-5062-2 Sa1yoimiya pewpewPas encore d'évaluation
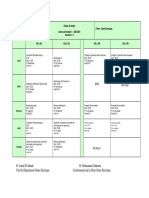
- Ecole Mohammadia D'ingénieurs Emploi Du Temps Année Universitaire: 2020-2021 Semestre: 4 Filière: Génie ElectriqueDocument1 pageEcole Mohammadia D'ingénieurs Emploi Du Temps Année Universitaire: 2020-2021 Semestre: 4 Filière: Génie Electriqueyahya amahritPas encore d'évaluation
- 1870 Dupuit Traite Equilibre Voutes PDFDocument404 pages1870 Dupuit Traite Equilibre Voutes PDFDolly Jese RabemanantsoaPas encore d'évaluation
- Série 1.modifiéDocument5 pagesSérie 1.modifiéIlyass BJRPas encore d'évaluation
- Disjoncteurs-Moteurs: Panorama 4/160 0.10 À 32 A - Avec Protection Magnéto-ThermiqueDocument38 pagesDisjoncteurs-Moteurs: Panorama 4/160 0.10 À 32 A - Avec Protection Magnéto-ThermiquePhilbertyuit PhPas encore d'évaluation
- Cours Master-Polycopie - Dynamique Des StructuresDocument129 pagesCours Master-Polycopie - Dynamique Des StructuresjijiPas encore d'évaluation
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Revue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteD'EverandRevue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteÉvaluation : 3 sur 5 étoiles3/5 (3)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Géobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainD'EverandGéobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- Anatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursD'EverandAnatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursPas encore d'évaluation
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Anatomie & 100 étirements essentiels pour le running: Principes de base, Techniques, Tableaux de séries, Précautions à prendre, Conseils, Programmes d'étirementsD'EverandAnatomie & 100 étirements essentiels pour le running: Principes de base, Techniques, Tableaux de séries, Précautions à prendre, Conseils, Programmes d'étirementsPas encore d'évaluation
- Cosmologie Égyptienne, L’Univers Animé, Troisième ÉditionD'EverandCosmologie Égyptienne, L’Univers Animé, Troisième ÉditionPas encore d'évaluation
- Production et propagation des sons: Les Grands Articles d'UniversalisD'EverandProduction et propagation des sons: Les Grands Articles d'UniversalisPas encore d'évaluation
- L'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaD'EverandL'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaÉvaluation : 3 sur 5 étoiles3/5 (1)
- Affirmations positives : Perte de poids pour les femmesD'EverandAffirmations positives : Perte de poids pour les femmesPas encore d'évaluation
- Les 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonD'EverandLes 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonPas encore d'évaluation
- Guide De Démarrage De L'Apiculture: Le Guide Complet Pour Élever Des AbeillesD'EverandGuide De Démarrage De L'Apiculture: Le Guide Complet Pour Élever Des AbeillesPas encore d'évaluation
- Manuel pour les débutants Fabriquez des savons naturelsD'EverandManuel pour les débutants Fabriquez des savons naturelsÉvaluation : 3 sur 5 étoiles3/5 (2)
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieD'EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieÉvaluation : 5 sur 5 étoiles5/5 (2)