Vous aimerez peut-être aussi
- TD Automatique Chapitre1 2Document9 pagesTD Automatique Chapitre1 2Mouad Ait AyachPas encore d'évaluation
- Correction Interrogation Regulationoption Forage 2014Document1 pageCorrection Interrogation Regulationoption Forage 2014abdouPas encore d'évaluation
- T.D. Automatique N 1 - Corrige PDFDocument7 pagesT.D. Automatique N 1 - Corrige PDFYassine BridiPas encore d'évaluation
- Solution Exo3 Et Exo4 TD 02Document7 pagesSolution Exo3 Et Exo4 TD 02Imane YahiaouiPas encore d'évaluation
- CI7 - DM1 PSI 2014-CorrigéDocument8 pagesCI7 - DM1 PSI 2014-CorrigéPou PouPas encore d'évaluation
- E3a 2007 Maths A CorrigeDocument5 pagesE3a 2007 Maths A CorrigemesecPas encore d'évaluation
- E3a MP 2007 Maths A CorrigeDocument5 pagesE3a MP 2007 Maths A CorrigeyoupidoPas encore d'évaluation
- Correction TD4Document4 pagesCorrection TD4Samah Ali BenamaraPas encore d'évaluation
- Correction EMD1 RégulationDocument3 pagesCorrection EMD1 RégulationabdouPas encore d'évaluation
- OoooooooooooooDocument4 pagesOooooooooooooonarimPas encore d'évaluation
- Corrigé Série TD N°2Document5 pagesCorrigé Série TD N°2Nadir SaoudiPas encore d'évaluation
- Chapitre 7Document4 pagesChapitre 7Nadia Mars HenchirPas encore d'évaluation
- Relation MatlabDocument5 pagesRelation MatlabSalma KadimiPas encore d'évaluation
- Chapitre1 AnalFoncAnalFourDocument34 pagesChapitre1 AnalFoncAnalFourReed DoloPas encore d'évaluation
- Chapitre5 AnalFoncAnalFourDocument63 pagesChapitre5 AnalFoncAnalFourReed DoloPas encore d'évaluation
- Corrigé TDDocument4 pagesCorrigé TDRadoineMarzaukPas encore d'évaluation
- Analyse 5Document21 pagesAnalyse 5susu worldPas encore d'évaluation
- SAMP td4.3 CorrigéDocument2 pagesSAMP td4.3 CorrigéOfficielAZNPas encore d'évaluation
- TD04 - Correction - CopieDocument7 pagesTD04 - Correction - CopieDOFONHAKOU LionelPas encore d'évaluation
- CC Proba 2019Document3 pagesCC Proba 2019benabdelazizchaimae2Pas encore d'évaluation
- Diffusion Milieu Multiplicateur-1Document22 pagesDiffusion Milieu Multiplicateur-1Hamid OuchaghouiPas encore d'évaluation
- Rapport TP SLDocument10 pagesRapport TP SLrocceli nzoulouPas encore d'évaluation
- Mai 2015 CorrigéDocument7 pagesMai 2015 CorrigéAli brahim MahamatPas encore d'évaluation
- ProbabilityTD1 Probas SN PDFDocument4 pagesProbabilityTD1 Probas SN PDFhaourch aminePas encore d'évaluation
- CorrectionDocument3 pagesCorrectionNaim ChPas encore d'évaluation
- Compte Rendu TP2 CODocument6 pagesCompte Rendu TP2 COwalid kahlounPas encore d'évaluation
- Seance4 Correction PDFDocument4 pagesSeance4 Correction PDFAli AhmedPas encore d'évaluation
- TdautoDocument16 pagesTdautoإدريس باباعربيPas encore d'évaluation
- FicheTD - PL - Etude - FonctionsDocument3 pagesFicheTD - PL - Etude - FonctionsKhalil cheick SavadogoPas encore d'évaluation
- TP N1 Antennes Et LignesDocument4 pagesTP N1 Antennes Et LignesLynda MOKRANIPas encore d'évaluation
- Série N°2 - 2023Document3 pagesSérie N°2 - 2023SOUHAIL CHEIKHPas encore d'évaluation
- 16 EuclidexoDocument5 pages16 EuclidexohmzbhiproPas encore d'évaluation
- TD16 CorrectionDocument3 pagesTD16 Correctionsoufiane8fka100% (1)
- Fic 00146Document6 pagesFic 00146Mohammed ChaoukiPas encore d'évaluation
- Capes Externe Math 2007Document8 pagesCapes Externe Math 2007Alae sayPas encore d'évaluation
- Correction (TD1 2) MDF - GI GEMI (20 21) S1 EtuDocument34 pagesCorrection (TD1 2) MDF - GI GEMI (20 21) S1 EtuBilly BignakePas encore d'évaluation
- TD 4 (Ex & Sol)Document18 pagesTD 4 (Ex & Sol)aymen sayoud50% (2)
- Tp3 AMDocument22 pagesTp3 AMLessemico SidimedPas encore d'évaluation
- CentraleSupélec 2021 PC Mathématiques 1 CaDocument8 pagesCentraleSupélec 2021 PC Mathématiques 1 Cajules.loisancePas encore d'évaluation
- Chapitre 6Document7 pagesChapitre 6Nadia Mars HenchirPas encore d'évaluation
- Représentation Temporelle Du MCCDocument11 pagesReprésentation Temporelle Du MCCSimi NePas encore d'évaluation
- Condition de CyclicitéDocument2 pagesCondition de CyclicitéAya BellaPas encore d'évaluation
- Correction Travaux Diriges N 1Document4 pagesCorrection Travaux Diriges N 1Oum Baki ElghaliPas encore d'évaluation
- Polynomes D'eulerDocument5 pagesPolynomes D'eulerprouserdesigner77Pas encore d'évaluation
- DS 1 20 21Document3 pagesDS 1 20 21MRayoub AbtPas encore d'évaluation
- TD 1 AlgebreDocument3 pagesTD 1 AlgebresiralexkmnPas encore d'évaluation
- Exercice: Temps D'attente À Un GuichetDocument8 pagesExercice: Temps D'attente À Un GuichetEdward AdounvoPas encore d'évaluation
- ds05 1920Document3 pagesds05 1920Ali KhanoubasPas encore d'évaluation
- R X R R: Termïnale A4 Exercice 1 (8pts)Document3 pagesR X R R: Termïnale A4 Exercice 1 (8pts)ezida diwePas encore d'évaluation
- DSCorrigé RDM DUT2 - 18 19Document4 pagesDSCorrigé RDM DUT2 - 18 19Falilou Ba Jr.Pas encore d'évaluation
- Auto1 Exercices1 SolutionsFinalesDocument1 pageAuto1 Exercices1 SolutionsFinalesYASYN LAMRIDPas encore d'évaluation
- LU3MA210 Partiel 13-03-2020 CorrigeDocument4 pagesLU3MA210 Partiel 13-03-2020 CorrigeWhalaPas encore d'évaluation
- TD Ds ExamensDocument61 pagesTD Ds Examenshaythem mokded100% (2)
- td3 SolDocument6 pagestd3 SolAbdoul Latif SinonPas encore d'évaluation
- CNC MP 2008 Chimie CorrigeDocument6 pagesCNC MP 2008 Chimie CorrigeAsmaa KasmiPas encore d'évaluation
- Math 2 MP2023 CBisDocument9 pagesMath 2 MP2023 CBisMoustakimPas encore d'évaluation
- TP 7Document15 pagesTP 7zinebPas encore d'évaluation
- Série 05Document1 pageSérie 05Mohamed MoussaouiPas encore d'évaluation
- Ser Som 25Document2 pagesSer Som 25Houssam BelgouzdemPas encore d'évaluation
- Catalogue MoteurDocument1 pageCatalogue MoteurMouad Ait AyachPas encore d'évaluation
- Chap1-Sys Monophasé Et TriphaséDocument18 pagesChap1-Sys Monophasé Et TriphasémahdiPas encore d'évaluation
- Merci de Bien PartagerDocument1 pageMerci de Bien PartagerMouad Ait AyachPas encore d'évaluation
- Exercices (Soudage)Document12 pagesExercices (Soudage)Mouad Ait AyachPas encore d'évaluation
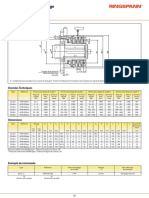
- Catalogue - Limiteurs de SurchargeDocument1 pageCatalogue - Limiteurs de SurchargeMouad Ait AyachPas encore d'évaluation
- TD Stat Descriptive ENSAM2223 - VSCDocument2 pagesTD Stat Descriptive ENSAM2223 - VSCMouad Ait AyachPas encore d'évaluation
- Cours Cours Mécanique Des Fluides Mécanique Des Fluides Mécanique Des Fluides Mécanique Des FluidesDocument41 pagesCours Cours Mécanique Des Fluides Mécanique Des Fluides Mécanique Des Fluides Mécanique Des FluidesMouad Ait AyachPas encore d'évaluation
- Projet BE1 2022-2023Document2 pagesProjet BE1 2022-2023Mouad Ait AyachPas encore d'évaluation
- Chapitre3Document137 pagesChapitre3Mouad Ait AyachPas encore d'évaluation
- Chapitre 2-PolyDocument34 pagesChapitre 2-PolyMouad Ait AyachPas encore d'évaluation
- Enseigner Les Plans MinitabDocument16 pagesEnseigner Les Plans MinitabMouad Ait AyachPas encore d'évaluation
- Examen RNE-2021Document2 pagesExamen RNE-2021Mouad Ait AyachPas encore d'évaluation
- Chap 2 Lois de Proba Et CVG 2022-23Document14 pagesChap 2 Lois de Proba Et CVG 2022-23Mouad Ait AyachPas encore d'évaluation
- Cahier de CoursDocument1 pageCahier de CoursMouad Ait AyachPas encore d'évaluation
- Rattrapage RNE-2021Document1 pageRattrapage RNE-2021Mouad Ait AyachPas encore d'évaluation
- td1 MS 20 21Document2 pagestd1 MS 20 21Kawtar AddalPas encore d'évaluation
- Examen Traitement de Signal 2015-2016+corrigéDocument12 pagesExamen Traitement de Signal 2015-2016+corrigéMouad Ait AyachPas encore d'évaluation
- Estampage 3 Ème 2022Document19 pagesEstampage 3 Ème 2022Mouad Ait AyachPas encore d'évaluation
- FORMATIONDocument1 pageFORMATIONMouad Ait AyachPas encore d'évaluation
- PC 2nd C - P1 Le MouvementDocument13 pagesPC 2nd C - P1 Le MouvementPina Spk100% (1)
- TD3-Circuits MagnétiquesDocument4 pagesTD3-Circuits MagnétiquesGhizlane FaroukiPas encore d'évaluation
- Modelisation Et Representation Des Systemes Asservis. PDF CourDocument8 pagesModelisation Et Representation Des Systemes Asservis. PDF CourHicham BaghdadiPas encore d'évaluation
- Solaire À Concentration, Du Présent Au Futur: Gilles FlamantDocument37 pagesSolaire À Concentration, Du Présent Au Futur: Gilles FlamantYou MajPas encore d'évaluation
- Analyse Spatiale L2 - 2014 - 2Document17 pagesAnalyse Spatiale L2 - 2014 - 2RATNAN NgadoumPas encore d'évaluation
- Laplace TPDocument4 pagesLaplace TPHanine HmidaPas encore d'évaluation
- TP Statique Partie1Document2 pagesTP Statique Partie1azerty uiopPas encore d'évaluation
- Modélisation Et Étude Des Réseaux ÉlectriquesDocument36 pagesModélisation Et Étude Des Réseaux Électriquesfarid saadPas encore d'évaluation
- Mpsem 2Document14 pagesMpsem 2Ossama FarajiPas encore d'évaluation
- Blondel Physiciens Francais Physis 1998Document28 pagesBlondel Physiciens Francais Physis 1998GroupementPas encore d'évaluation
- Proba Ipeit PDFDocument14 pagesProba Ipeit PDFanon_340181204Pas encore d'évaluation
- Chapitre 1Document14 pagesChapitre 1ABDESSALAM MOHAIMIPas encore d'évaluation
- Calcul de VitessesDocument2 pagesCalcul de VitessesOualid OuadoudiPas encore d'évaluation
- Criteres D'acceptation - Radiographie - API 1104Document1 pageCriteres D'acceptation - Radiographie - API 1104Karim HADDADPas encore d'évaluation
- Représentation Fonctionnelle D'un Système Technique Doc Prof 2009-2010Document5 pagesReprésentation Fonctionnelle D'un Système Technique Doc Prof 2009-2010Arwa BerrichPas encore d'évaluation
- Physique 19Document20 pagesPhysique 19Meryem ELMOGHRTIPas encore d'évaluation
- Série DDocument7 pagesSérie DMessAoudi SaBerPas encore d'évaluation
- Résumé Produit Scalaire Plan 1bacDocument1 pageRésumé Produit Scalaire Plan 1bacjilalixmcPas encore d'évaluation
- Exo ProbaDocument3 pagesExo ProbaAllouan JeanPas encore d'évaluation
- These Zegai Doctorat Ett 2017-2018Document181 pagesThese Zegai Doctorat Ett 2017-2018Marya Ait IshaPas encore d'évaluation
- 03-1 - TD Fiabilité - Etude Empyrique Des DéfaillancesDocument11 pages03-1 - TD Fiabilité - Etude Empyrique Des DéfaillancesAhmed MohamedPas encore d'évaluation
- 3cas Particulier FCT Peigne DiracDocument2 pages3cas Particulier FCT Peigne DirachamzaPas encore d'évaluation
- 2018 19 Examen Mai CorrectionDocument5 pages2018 19 Examen Mai CorrectionRidersPas encore d'évaluation
- CHAPITRE 1 Les OndesDocument12 pagesCHAPITRE 1 Les Ondesmanarlamghari003Pas encore d'évaluation
- Phys 2 Chap 3Document9 pagesPhys 2 Chap 3Mo HaPas encore d'évaluation
- La TectoniqueDocument7 pagesLa Tectoniquekhengaoui malakPas encore d'évaluation
- STI Materiaux Caledonie Nov 2002Document3 pagesSTI Materiaux Caledonie Nov 2002Daniel Alex GolyPas encore d'évaluation
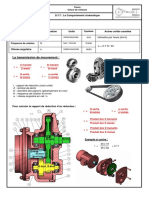
- 7.1 Cours À Remplir FONCTION 3eme Janv2022Document3 pages7.1 Cours À Remplir FONCTION 3eme Janv2022Marguerite DuncanPas encore d'évaluation
- Cours de Mécanique Des Fluides - Chapitre 2 - Groupe 9Document14 pagesCours de Mécanique Des Fluides - Chapitre 2 - Groupe 9nicko NickopPas encore d'évaluation
- Compte Rendu Du TP N CBDocument9 pagesCompte Rendu Du TP N CBMourad TlmPas encore d'évaluation
- Le Minage De Bitcoin 101: Le Guide du Débutant de Bitcoin Pour Faire de L'argent Avec Des BitcoinsD'EverandLe Minage De Bitcoin 101: Le Guide du Débutant de Bitcoin Pour Faire de L'argent Avec Des BitcoinsÉvaluation : 4 sur 5 étoiles4/5 (1)
- Scrum - Le Guide Ultime des Méthodes Agiles Essentielles de Scrum!D'EverandScrum - Le Guide Ultime des Méthodes Agiles Essentielles de Scrum!Pas encore d'évaluation
- Du Néant à la Formule Universelle et retour: La structure des particules élémentaires XIIIfD'EverandDu Néant à la Formule Universelle et retour: La structure des particules élémentaires XIIIfPas encore d'évaluation
- Accès à l’électricité en Afrique subsaharienne: Adoption, fiabilité, et facteurs complémentaires d'impact économiqueD'EverandAccès à l’électricité en Afrique subsaharienne: Adoption, fiabilité, et facteurs complémentaires d'impact économiquePas encore d'évaluation