Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- 7-Cours Asynchrone EEADocument21 pages7-Cours Asynchrone EEAyassin akkninnPas encore d'évaluation
- Machine Asynchrone TolotraDocument11 pagesMachine Asynchrone TolotraManoaPas encore d'évaluation
- Moteur SynchroneDocument11 pagesMoteur SynchroneAhmed MidoPas encore d'évaluation
- Analyse Fonctionnement Moteur A CaDocument18 pagesAnalyse Fonctionnement Moteur A Caabdelhakim gandouz100% (2)
- TP Machine ElectriqueDocument17 pagesTP Machine ElectriqueAbderrahim HamdadPas encore d'évaluation
- Machines Électriques 4: Comptes Rendus Des Travaux Pratiques (Essais Et Mesures)Document22 pagesMachines Électriques 4: Comptes Rendus Des Travaux Pratiques (Essais Et Mesures)Amr AmrPas encore d'évaluation
- Moteur ATRDocument15 pagesMoteur ATRMouh ZourdaniPas encore d'évaluation
- 2 Demarrage Moteur AsynchroneDocument9 pages2 Demarrage Moteur AsynchroneBen Saber RahiimPas encore d'évaluation
- Cour 1 Redress Ment Mono PhaseDocument39 pagesCour 1 Redress Ment Mono Phaseمفتاح الدينPas encore d'évaluation
- CHAPITRE3 MOEUR AsynchroneDocument43 pagesCHAPITRE3 MOEUR AsynchroneMed ElkotbiPas encore d'évaluation
- Type de Demmarage Motor AsynchroneDocument23 pagesType de Demmarage Motor AsynchroneRaouf ToutouPas encore d'évaluation
- Cours MAS RésuméDocument7 pagesCours MAS RésuméMak HimPas encore d'évaluation
- Les Machines AsynchronesDocument20 pagesLes Machines Asynchronesbedoui marwenPas encore d'évaluation
- Chap8 Cablage MoteurDocument8 pagesChap8 Cablage MoteurdylanekooPas encore d'évaluation
- AlternateurDocument6 pagesAlternateurmouf zerargaPas encore d'évaluation
- Cours Moteur EleveDocument19 pagesCours Moteur EleveChola KahoziPas encore d'évaluation
- Sans Nom 1Document10 pagesSans Nom 1Main VertePas encore d'évaluation
- Historique: I.1 Eléments Constituant de La Machine AsynchroneDocument12 pagesHistorique: I.1 Eléments Constituant de La Machine Asynchronebenke manouPas encore d'évaluation
- Machine À Courant Continu 2023 - 111654Document6 pagesMachine À Courant Continu 2023 - 111654Khaled BenyoucefPas encore d'évaluation
- These LALLBEEHARRY NavishDocument26 pagesThese LALLBEEHARRY NavishSARAPas encore d'évaluation
- MOCN ProjetDocument10 pagesMOCN Projetboubeghla nadirPas encore d'évaluation
- Cours 3Document18 pagesCours 3Amina NouriPas encore d'évaluation
- RésuméDocument36 pagesRésuméBoundjick Issa100% (1)
- Chap 6Document11 pagesChap 6Nch NMPas encore d'évaluation
- CH08 PDFDocument4 pagesCH08 PDFFarid AfifiPas encore d'évaluation
- Cours de Machines Electrique ELEQ 4 PDFDocument52 pagesCours de Machines Electrique ELEQ 4 PDFCyrille Heubia100% (5)
- Labo Machines Asynchrones Triphasées - BAMAR AZIZDocument17 pagesLabo Machines Asynchrones Triphasées - BAMAR AZIZvidalPas encore d'évaluation
- RésuméDocument36 pagesRésuméCheikh Brahim Elkhadar100% (1)
- Machine AsynchroneDocument8 pagesMachine AsynchroneEL HAFIANI MOUADPas encore d'évaluation
- McccorDocument6 pagesMcccorcavasquePas encore d'évaluation
- Chapitre 4 - Machine AsynchroneDocument113 pagesChapitre 4 - Machine AsynchroneOmom chamarohPas encore d'évaluation
- Support - TP3-Moteur Monophasé PDFDocument11 pagesSupport - TP3-Moteur Monophasé PDFFarid Khoucha100% (1)
- Moteurs Asynchrones TriphasésDocument34 pagesMoteurs Asynchrones TriphasésMajda SerbatPas encore d'évaluation
- Machine AsynchroneDocument16 pagesMachine AsynchroneEr-Rhahmani MedPas encore d'évaluation
- Module: Electrotechnique: Chapitre 4: Machine Asynchrone Triphasée (Partie 1)Document38 pagesModule: Electrotechnique: Chapitre 4: Machine Asynchrone Triphasée (Partie 1)MERIEM LGARRAHPas encore d'évaluation
- Machines SynchronesDocument12 pagesMachines SynchronesZaki LarabaPas encore d'évaluation
- Exercices CorrigésDocument26 pagesExercices CorrigésSara Shamsse86% (21)
- Machine Asynchrone Variation VitesseDocument36 pagesMachine Asynchrone Variation VitesseAzou ThtPas encore d'évaluation
- Tp3 Mas CaractDocument5 pagesTp3 Mas CaractDaly ZeddiniPas encore d'évaluation
- TP 6 Machines Electriques 2Document7 pagesTP 6 Machines Electriques 2REZOPas encore d'évaluation
- Les Machines Synchrones 2019-2020Document81 pagesLes Machines Synchrones 2019-2020sawadogo100% (3)
- Rapport 4 Moteur AsychromeDocument19 pagesRapport 4 Moteur Asychromeabdirazack mohamedPas encore d'évaluation
- Les Moteurs À Courant Continu, Synchrone Et AsynchroneDocument11 pagesLes Moteurs À Courant Continu, Synchrone Et AsynchroneHamza NabilPas encore d'évaluation
- Machines A Courant Alternatif PDFDocument4 pagesMachines A Courant Alternatif PDFHmz OussamaPas encore d'évaluation
- Machines A Courant AlternatifDocument4 pagesMachines A Courant AlternatifMohamed Yacine RachediPas encore d'évaluation
- 1CPI Cours MASDocument8 pages1CPI Cours MASANDAHMOUPas encore d'évaluation
- TP 03 NchafDocument16 pagesTP 03 NchafhadjmedyousraPas encore d'évaluation
- Machine Tournante À Courant AlternatifDocument6 pagesMachine Tournante À Courant AlternatifSofiane HAMCHAOUIPas encore d'évaluation
- Démarrage +freinage +protection Des Moteurs ElectriquesDocument35 pagesDémarrage +freinage +protection Des Moteurs ElectriquesRachid Berrah86% (14)
- Demrrage MotorDocument26 pagesDemrrage MotorAZIZ81936Pas encore d'évaluation
- CH1 Introduction A La Commande Des Machines Electriques A Courant ContinuDocument65 pagesCH1 Introduction A La Commande Des Machines Electriques A Courant ContinumarPas encore d'évaluation
- TP5 Cours Moteur Eleve PDFDocument19 pagesTP5 Cours Moteur Eleve PDFImene100% (1)
- Commande Des Machines Tle F3.Document31 pagesCommande Des Machines Tle F3.Christian100% (6)
- OimiriDocument7 pagesOimiriOub AidaPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Photovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVD'EverandPhotovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVPas encore d'évaluation
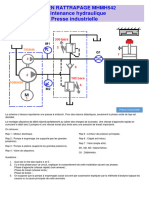
- Examen Rattrapage MHMH542 2021Document2 pagesExamen Rattrapage MHMH542 2021Ahmed KhalilPas encore d'évaluation
- MHMH542 (Complet)Document67 pagesMHMH542 (Complet)Ahmed KhalilPas encore d'évaluation
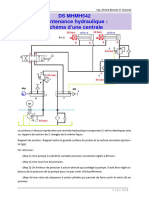
- DS MHMH542 Semaine 15Document2 pagesDS MHMH542 Semaine 15Ahmed KhalilPas encore d'évaluation
- Hydraulique ProprtionnelleDocument97 pagesHydraulique ProprtionnelleAhmed KhalilPas encore d'évaluation
- IntroductionDocument34 pagesIntroductionAhmed KhalilPas encore d'évaluation
- Guide Capacite3Document80 pagesGuide Capacite3Ahmed KhalilPas encore d'évaluation
- Cours rdm1Document18 pagesCours rdm1Mll RaghebPas encore d'évaluation
- RDM Khemili 2021 Chap2 1Document33 pagesRDM Khemili 2021 Chap2 1Ahmed KhalilPas encore d'évaluation
- Mini Projet RDM6Document10 pagesMini Projet RDM6kamalPas encore d'évaluation
- Cours RDM-Khemili 2023-Chap6Document15 pagesCours RDM-Khemili 2023-Chap6Ahmed KhalilPas encore d'évaluation
- Cours RDM Khemili 2019 Chap5Document12 pagesCours RDM Khemili 2019 Chap5Abir BøukërPas encore d'évaluation
- Cours RDM-Khemili 2020-Chap1Document14 pagesCours RDM-Khemili 2020-Chap1Rossiny NganiPas encore d'évaluation
- Cours RDM-Khemili 2023-Chap2-2Document24 pagesCours RDM-Khemili 2023-Chap2-2Ahmed KhalilPas encore d'évaluation
- Cours RDM-Khemili 2023-Chap6Document15 pagesCours RDM-Khemili 2023-Chap6Ahmed KhalilPas encore d'évaluation
- RADEM À Imprimer FinaaaaaaaaaaaaaaalDocument55 pagesRADEM À Imprimer FinaaaaaaaaaaaaaaalChrif ÀyOùb0% (1)
- PFE IEEA Etude Sur Protections NumériquesDocument73 pagesPFE IEEA Etude Sur Protections NumériquesMohamed Jennah100% (2)
- Generalites FiltrageDocument31 pagesGeneralites Filtrageab_douPas encore d'évaluation
- Electrotechnique Aide Memoire PDFDocument20 pagesElectrotechnique Aide Memoire PDFDroul FredPas encore d'évaluation
- Didouh GuelmaDocument5 pagesDidouh Guelmasoumia DIDOUHPas encore d'évaluation
- Enp Var - Vit 1 - Ai Zegrari PDFDocument22 pagesEnp Var - Vit 1 - Ai Zegrari PDFPeix HichamPas encore d'évaluation
- Installations Électriques BT TI-d5048 PDFDocument10 pagesInstallations Électriques BT TI-d5048 PDFanisPas encore d'évaluation
- TD3 Régulation Industrielle - 230917 - 211202Document2 pagesTD3 Régulation Industrielle - 230917 - 211202salah fcbPas encore d'évaluation
- ExamfinalDocument5 pagesExamfinalgharbi mayssenPas encore d'évaluation
- Série 4-Réseaux ÉlectriquesDocument4 pagesSérie 4-Réseaux ÉlectriqueskmasmaPas encore d'évaluation
- 427461409Document2 pages427461409Khouloud KouloulaPas encore d'évaluation
- 18 Bissinge KatalogDocument55 pages18 Bissinge Kataloginstrumed_globalPas encore d'évaluation
- TP 1Document16 pagesTP 1Aimen Saber MessaoudiPas encore d'évaluation
- EL 3-2: Portes Logiques de Base ObjectifsDocument3 pagesEL 3-2: Portes Logiques de Base ObjectifsAnouarPas encore d'évaluation
- RApport TPDocument25 pagesRApport TPOumar MandodjoPas encore d'évaluation
- TD - Commande Électronique de MoteursDocument4 pagesTD - Commande Électronique de MoteursOthmane SellaiPas encore d'évaluation
- Intensite Jeu de Barres CuDocument15 pagesIntensite Jeu de Barres CuAbouZakariaPas encore d'évaluation
- MPPT Regulator Tracer 2210cn ManualDocument28 pagesMPPT Regulator Tracer 2210cn ManualLizardo Astudillo CruzPas encore d'évaluation
- Programme 2 Ème AnnéeDocument7 pagesProgramme 2 Ème AnnéeAngibeau Baba DangibeauPas encore d'évaluation
- TP Enonce EMDocument19 pagesTP Enonce EMabdessalam MedjPas encore d'évaluation
- Chapitre 2cDocument13 pagesChapitre 2cBouchra BourassPas encore d'évaluation
- Atv630 650Document194 pagesAtv630 650Bertrand ZongoPas encore d'évaluation
- 18-Guide de Precablage InformatiqueDocument41 pages18-Guide de Precablage InformatiquemohamedPas encore d'évaluation
- Amplificateur OpérationnelDocument26 pagesAmplificateur OpérationnelfredPas encore d'évaluation
- Correction TD n2 - Incertitudes de MesureDocument7 pagesCorrection TD n2 - Incertitudes de MesureAhmed sebaiPas encore d'évaluation
- Physique-Serie-D 3Document2 pagesPhysique-Serie-D 3henry michelPas encore d'évaluation
- SONELGAZ EXTRAITS DU CAHIER DES CHARGES. (Relatif Aux Conditions de Fourniture de L Électricité Et Du Gaz Par Canalisations)Document12 pagesSONELGAZ EXTRAITS DU CAHIER DES CHARGES. (Relatif Aux Conditions de Fourniture de L Électricité Et Du Gaz Par Canalisations)Abdelkader GPas encore d'évaluation
- Machine Synchrone Aimant PermanentDocument37 pagesMachine Synchrone Aimant PermanentHicham Omr0% (1)
- TP HacheurDocument5 pagesTP HacheurKano100% (1)
- Gestion de La CouleurDocument81 pagesGestion de La CouleurEl BatoulPas encore d'évaluation