Vous aimerez peut-être aussi
- Cahier SI SEM I + Media 2Document121 pagesCahier SI SEM I + Media 2Michri SaleckPas encore d'évaluation
- Evaluation Roulement AjustementDocument1 pageEvaluation Roulement AjustementElla Kabongo100% (2)
- Fabrication Croix de MalteDocument8 pagesFabrication Croix de MalteSidi Rach100% (1)
- Les EngrenagesDocument10 pagesLes Engrenagessouheil_souPas encore d'évaluation
- 15 Transmission de Puissance Par EngrenagesDocument14 pages15 Transmission de Puissance Par Engrenageszouhour brahmiPas encore d'évaluation
- 191 LesengrenagesDocument8 pages191 LesengrenagesMoncef MhasniPas encore d'évaluation
- Transm Poulies Chaines Engrenages VCDocument7 pagesTransm Poulies Chaines Engrenages VCHelmi Kadri100% (1)
- CPI1 CONST TD Exercices EngrenagesDocument4 pagesCPI1 CONST TD Exercices Engrenagesyassine lakhalPas encore d'évaluation
- Chap4 Tr-Poulies Courroies PDFDocument10 pagesChap4 Tr-Poulies Courroies PDFAyouubPas encore d'évaluation
- Cours EngrenagesDocument5 pagesCours Engrenagessub-ka100% (1)
- Chapitre 5 Transmission Puissance EngrenagesDocument14 pagesChapitre 5 Transmission Puissance EngrenagesDhaouadi AymenPas encore d'évaluation
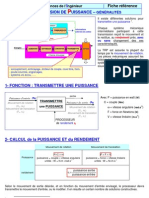
- Transmission de Puissance - GeneralitesDocument10 pagesTransmission de Puissance - Generalitesntayoub75% (4)
- Engrenages 1Document7 pagesEngrenages 1Mohamed LaliouiPas encore d'évaluation
- Transmissions Par Poulies Et Courroies - Sciences Et TechnologiesDocument14 pagesTransmissions Par Poulies Et Courroies - Sciences Et TechnologiesrachidaccPas encore d'évaluation
- Chap 1 EngrenagesDocument8 pagesChap 1 EngrenagesMouhamed Rassoul GueyePas encore d'évaluation
- ENGRENAGESDocument54 pagesENGRENAGESjaafar alPas encore d'évaluation
- Choix D'un AccouplementDocument4 pagesChoix D'un AccouplementSlim KanounPas encore d'évaluation
- Tableau Coeff FrottementDocument1 pageTableau Coeff Frottementbenoo13100% (1)
- Transmission de Puissance Prof PDFDocument16 pagesTransmission de Puissance Prof PDFRuppy MIYOUNAPas encore d'évaluation
- SNT Ri40 - DTDocument3 pagesSNT Ri40 - DTBoris Cathérin Vidjannagni DOHOUPas encore d'évaluation
- Présentation Cours Engrenages 2016-2017 PDFDocument65 pagesPrésentation Cours Engrenages 2016-2017 PDFMouaad AlouaniPas encore d'évaluation
- Choix Module Rapport Des Vitesses Engrenage Droit PDFDocument2 pagesChoix Module Rapport Des Vitesses Engrenage Droit PDFRayen BettaebPas encore d'évaluation
- Correction de DentureDocument5 pagesCorrection de DenturetopjobPas encore d'évaluation
- Calcul Des RoulementDocument12 pagesCalcul Des Roulementyousseftrimech4871Pas encore d'évaluation
- 34 Reducteur PDFDocument2 pages34 Reducteur PDFgilbertogato100% (3)
- Transmission (Annexe BAC)Document10 pagesTransmission (Annexe BAC)MIMFS100% (1)
- Engrenage - Cours PDFDocument64 pagesEngrenage - Cours PDFlagrange27 lagrange100% (1)
- Engrenages À Denture ConiqueDocument28 pagesEngrenages À Denture ConiquefernandtPas encore d'évaluation
- TD Vérin Rotatif Amorti ÉlèveDocument5 pagesTD Vérin Rotatif Amorti ÉlèveZAEKHK ZEIGZA100% (2)
- Clavette Goupille Emm Conique ReduitDocument6 pagesClavette Goupille Emm Conique ReduitMoez BenjaberPas encore d'évaluation
- Engrenages ConiquesDocument3 pagesEngrenages ConiquesAmine IsaAdPas encore d'évaluation
- Guidage en Rotation PDFDocument7 pagesGuidage en Rotation PDFAyyoub BadreddinePas encore d'évaluation
- Poulie Et Courroie PDFDocument14 pagesPoulie Et Courroie PDFchouchenePas encore d'évaluation
- Roues Et Chaine 2015Document3 pagesRoues Et Chaine 2015barryhamadounallaye1100% (1)
- Diapo Cours - RLT 16 17Document36 pagesDiapo Cours - RLT 16 17Section Maintenance LP-BlériotPas encore d'évaluation
- Accouplement GénéralitésDocument4 pagesAccouplement Généralitésmatozo100% (1)
- 3-Roues de FrictionDocument8 pages3-Roues de FrictionJaksMaksPas encore d'évaluation
- Transmission de Puissance EngrenagesDocument31 pagesTransmission de Puissance Engrenagesiraoui jamal (Ebay)Pas encore d'évaluation
- Chapitre 4 - Assembages Par Éléments FiletésDocument7 pagesChapitre 4 - Assembages Par Éléments Filetésahidouri100% (2)
- Accouplement CoursDocument4 pagesAccouplement CoursElarbi JaffelPas encore d'évaluation
- Reducteur A Vis Sans FinDocument18 pagesReducteur A Vis Sans FinImane ElkhoukhPas encore d'évaluation
- Liaison PivotDocument54 pagesLiaison PivotElgoHouda100% (1)
- Exercices PDFDocument9 pagesExercices PDFerzrzretgertfertgePas encore d'évaluation
- c12 Engrenages PDFDocument80 pagesc12 Engrenages PDFerzrzretgertfertgePas encore d'évaluation
- Polycopie Moodle 13Document160 pagesPolycopie Moodle 13Abderrahmen AridhiPas encore d'évaluation
- TD 1Document2 pagesTD 1hello 128Pas encore d'évaluation
- Liaisons GlissieresDocument65 pagesLiaisons GlissieresImen HammoudaPas encore d'évaluation
- Calcul Des Chaines MecaniquesDocument13 pagesCalcul Des Chaines Mecaniquesbest.ever.2010100% (1)
- Montage de RoulementsDocument36 pagesMontage de RoulementsBen Hamda FethiPas encore d'évaluation
- EMBRAYAGETDESADocument10 pagesEMBRAYAGETDESAHafida EnnajiPas encore d'évaluation
- Roulements EngrenagesDocument13 pagesRoulements EngrenageslachhelPas encore d'évaluation
- 4 - Transmission de PuissanceDocument36 pages4 - Transmission de PuissanceElhousine EchchhibatPas encore d'évaluation
- Chap08 MAS PDFDocument4 pagesChap08 MAS PDFCheikh Brahim Elkhadar100% (1)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.D'EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Pas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Transmission de Puissance Par EngrenagesDocument9 pagesTransmission de Puissance Par EngrenagesShake SpearePas encore d'évaluation
- 5 - Transmission de Puissance Par EngrenageDocument17 pages5 - Transmission de Puissance Par Engrenagearijbaazaoui4Pas encore d'évaluation
- EDM2 Chap4Document19 pagesEDM2 Chap4Mohamed GrinePas encore d'évaluation
- 3.2.1 - Cours Prof - Engrenages DroitsDocument10 pages3.2.1 - Cours Prof - Engrenages Droitsmarouan115Pas encore d'évaluation
- 5 - Cahp 5 Transmission de Puissance Par Engrenages - EtudiantsDocument13 pages5 - Cahp 5 Transmission de Puissance Par Engrenages - EtudiantsSaber Hamdi0% (1)
- Lim CouplDocument2 pagesLim CouplAbderrazak MiassarPas encore d'évaluation
- TD 11 - Cinématique Graphique - Composition Des Vecteurs VitessesDocument4 pagesTD 11 - Cinématique Graphique - Composition Des Vecteurs Vitessesmouly100% (1)
- Chapitre 3 CinématiqueDocument13 pagesChapitre 3 CinématiqueBourezak CélinePas encore d'évaluation
- TD Du CH01: Les Moteurs Électriques Et Les Charges MécaniquesDocument5 pagesTD Du CH01: Les Moteurs Électriques Et Les Charges MécaniquesM O K 5 L I S 777Pas encore d'évaluation
- TD 2 Cinétique MP-PSI-TSIDocument8 pagesTD 2 Cinétique MP-PSI-TSIImad NouniPas encore d'évaluation
- Schaltbild FDocument17 pagesSchaltbild FAhmed HAPas encore d'évaluation
- 03 ParametrageDocument7 pages03 ParametrageDHia Ben AichaPas encore d'évaluation
- S3 TD Transmission de MouvementsDocument4 pagesS3 TD Transmission de Mouvementstmodel077Pas encore d'évaluation
- Examen Final Mécanique Rationnelle I 2020 CorrigéDocument3 pagesExamen Final Mécanique Rationnelle I 2020 CorrigéAnes BelaidPas encore d'évaluation
- TCCL01 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique Et La Loi Entrée-Sortie en Effort D'un Réducteur Ou Multiplicateur de VitesseDocument9 pagesTCCL01 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique Et La Loi Entrée-Sortie en Effort D'un Réducteur Ou Multiplicateur de VitesseAbdelbassit FadilPas encore d'évaluation
- Irodov - Principes Fondamentaux de La Mécanique - MirDocument225 pagesIrodov - Principes Fondamentaux de La Mécanique - MirHicham YangPas encore d'évaluation
- Evaluation N4 AFS1 11Document3 pagesEvaluation N4 AFS1 11Lukas GarnierPas encore d'évaluation
- Physique 4e Seq TleC Lycée - BANZADocument2 pagesPhysique 4e Seq TleC Lycée - BANZAtchindakengnepatersonPas encore d'évaluation
- TD 28 Corrigé - PFS Résolution GraphiqueDocument14 pagesTD 28 Corrigé - PFS Résolution GraphiqueMohamed AbaakilPas encore d'évaluation
- 3798 Elements de Corrige Epreuve E11 Bacpro MM Septembre 2013Document16 pages3798 Elements de Corrige Epreuve E11 Bacpro MM Septembre 2013AliPas encore d'évaluation
- BienDocument40 pagesBienAli LabidiPas encore d'évaluation
- Automobile 2 V 5Document48 pagesAutomobile 2 V 5Ammar BahijPas encore d'évaluation
- MecaniqueDocument20 pagesMecaniquehamzaPas encore d'évaluation
- Devoir de Synthese N°2 1as Lycee Bir Lahmar Azzabi Moez-2020-2021 - 095211Document6 pagesDevoir de Synthese N°2 1as Lycee Bir Lahmar Azzabi Moez-2020-2021 - 095211Imed MoussaPas encore d'évaluation
- TP 7 Etude Chaine Transmission Puissance PDFDocument22 pagesTP 7 Etude Chaine Transmission Puissance PDFAGBAPas encore d'évaluation
- LiaisonsDocument1 pageLiaisonsmedPas encore d'évaluation
- Introduction Aux Elfini Dic2 2019Document122 pagesIntroduction Aux Elfini Dic2 2019HTR WAS HEREPas encore d'évaluation
- 3 Liaisons MécaniquesDocument6 pages3 Liaisons MécaniquesWafa Raboudi0% (1)
- Transmission D11Document61 pagesTransmission D11yassine omarPas encore d'évaluation
- Electrotechnique BTSDocument69 pagesElectrotechnique BTSbhsbhs19100% (1)
- Etau D ModelisteDocument23 pagesEtau D ModelisteYoro Boubou SIDIBEPas encore d'évaluation
- Accouplements Embrayages FreinsDocument15 pagesAccouplements Embrayages FreinstnpqqjndrzPas encore d'évaluation
- CorrigeDocument2 pagesCorrigehassankchPas encore d'évaluation
- Cours 05 - RobotiqueDocument15 pagesCours 05 - Robotiqueiulya13Pas encore d'évaluation