Vous aimerez peut-être aussi
- Les Liaisons Doc Prof MOUKHTARIDocument9 pagesLes Liaisons Doc Prof MOUKHTARIELMustaphaELMoukhtariPas encore d'évaluation
- Theorie Des Mecanismes MisDocument42 pagesTheorie Des Mecanismes MisSemlali Zakaria100% (2)
- 5 Etude Cinématique Des Mécanismes Plans, Méthode Graphique PDFDocument20 pages5 Etude Cinématique Des Mécanismes Plans, Méthode Graphique PDFMario Stifler0% (1)
- Chapitre 2 - Méca Transf de Mvts Par Syst Bielle ManivelleDocument14 pagesChapitre 2 - Méca Transf de Mvts Par Syst Bielle Manivelleelking gingstarsPas encore d'évaluation
- Série 01 Avec Solution TypeDocument3 pagesSérie 01 Avec Solution Typenafaa_ali1375Pas encore d'évaluation
- Chapitre 3. Analyse Cinématique MécanismesDocument37 pagesChapitre 3. Analyse Cinématique MécanismesMohamed EddriefPas encore d'évaluation
- Construction Mécanique 2Document75 pagesConstruction Mécanique 2yassir aboulcaidPas encore d'évaluation
- Théorie de Mécanisme 4Document6 pagesThéorie de Mécanisme 4hamza100% (1)
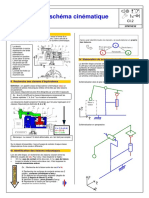
- 3 1 4 Schema CinematiqueDocument1 page3 1 4 Schema Cinematiquehitachi hadiPas encore d'évaluation
- TD1 Schéma Ciné Casse ÉcrouDocument2 pagesTD1 Schéma Ciné Casse ÉcrouAlami El100% (3)
- 18 Vis EcrouDocument8 pages18 Vis EcrouHadda Chokri100% (1)
- Construction MécaniqueDocument70 pagesConstruction MécaniqueMohamed EddriefPas encore d'évaluation
- Corrige Examen TM 2018Document5 pagesCorrige Examen TM 2018FAWZI RONALDOPas encore d'évaluation
- Théorie de Mécanisme 1Document15 pagesThéorie de Mécanisme 1hamzaPas encore d'évaluation
- Cours - Cours de Technologie de BaseDocument37 pagesCours - Cours de Technologie de BaseSAIB BRAHIMPas encore d'évaluation
- Examen Theorie Des Mécanismes 2016 (Solution)Document3 pagesExamen Theorie Des Mécanismes 2016 (Solution)Abdou EssamyPas encore d'évaluation
- Cours Construction Mecanique Schema CinematiqueDocument103 pagesCours Construction Mecanique Schema CinematiquenarimPas encore d'évaluation
- ANALYSE de MécanismeDocument53 pagesANALYSE de MécanismeAchref Sallami100% (1)
- Licence - Construction MécaniqueDocument91 pagesLicence - Construction MécaniqueLoujeine JouriPas encore d'évaluation
- Chapitre 5 - Guidage en RotationDocument17 pagesChapitre 5 - Guidage en Rotationahidouri100% (1)
- Fascicule Outillage Porte PièceDocument123 pagesFascicule Outillage Porte Piècenouban100% (1)
- SciesauteusecorrectionDocument3 pagesSciesauteusecorrectionyumiPas encore d'évaluation
- 06 MECA0444-ArbresIDocument49 pages06 MECA0444-ArbresIElmehdi ElmessaoudiPas encore d'évaluation
- 1 Cours Statique AnalytiqueDocument2 pages1 Cours Statique AnalytiqueMohamed NaciriPas encore d'évaluation
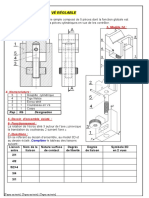
- Vé Réglable 2021Document4 pagesVé Réglable 2021hamrouniPas encore d'évaluation
- LE PERCAGE. Technique - Usinage - C STDocument16 pagesLE PERCAGE. Technique - Usinage - C STBouraoui Ben AyedPas encore d'évaluation
- Mecanismes PDFDocument34 pagesMecanismes PDFesloch50% (2)
- Chapitre 2Document18 pagesChapitre 2riad chouiterPas encore d'évaluation
- TP FMDocument15 pagesTP FMMahdiPas encore d'évaluation
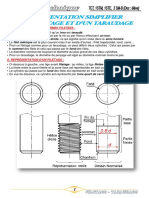
- Filetage Et Taraudage Cours PDFDocument4 pagesFiletage Et Taraudage Cours PDFnosilin100% (2)
- TD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimpleDocument6 pagesTD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimplehoubaPas encore d'évaluation
- Chapitre Isostatisme (Important)Document3 pagesChapitre Isostatisme (Important)honi100% (1)
- Chapitre 2 MODELISATION DES LIAISONSDocument15 pagesChapitre 2 MODELISATION DES LIAISONSChaker Chaoual100% (1)
- TD4 Diagrammes TRC Et TTT (Correction) - PDFDocument1 pageTD4 Diagrammes TRC Et TTT (Correction) - PDFABDOUR RAHMAN Attaoualh100% (1)
- Chapitre N°1 Systèmes Mécaniques PDFDocument19 pagesChapitre N°1 Systèmes Mécaniques PDFmzoughiPas encore d'évaluation
- Poly Théorie Des MécanismesDocument24 pagesPoly Théorie Des MécanismesJaksMaksPas encore d'évaluation
- Theorie Des Mecanismes Et Des Machines I & Ii: Docteur Claude Valery NGAYIHI ABBEDocument94 pagesTheorie Des Mecanismes Et Des Machines I & Ii: Docteur Claude Valery NGAYIHI ABBEStanislas Snakerman90% (10)
- Principe Fondamental de La StatiqueDocument10 pagesPrincipe Fondamental de La StatiqueGYPAETEPas encore d'évaluation
- Qualification MGP Metrologie Dimensionnelle Et GeometriqueDocument29 pagesQualification MGP Metrologie Dimensionnelle Et GeometriqueHamza Naziha100% (1)
- COURS Théorie Des Mécanismes PDFDocument5 pagesCOURS Théorie Des Mécanismes PDFMohamed NaciriPas encore d'évaluation
- Chapitre 10 FraisageDocument22 pagesChapitre 10 FraisageKhaled GammoudiPas encore d'évaluation
- Correction TD 3 Schéma CinématiqueDocument7 pagesCorrection TD 3 Schéma CinématiqueShooting StarPas encore d'évaluation
- F-IRIS2-06 Exercices Solution Courbe de BézierDocument7 pagesF-IRIS2-06 Exercices Solution Courbe de BézierBenali FaroukPas encore d'évaluation
- Fraisage 02Document13 pagesFraisage 02Nezar DhiaPas encore d'évaluation
- Dynamique de Machines TournantesDocument67 pagesDynamique de Machines TournantesTôha MaïgaPas encore d'évaluation
- TP Boite de Vitesses D'un Tour Parallèle 2014 (DR) PDFDocument6 pagesTP Boite de Vitesses D'un Tour Parallèle 2014 (DR) PDFKarim Kilani100% (2)
- Caractères de LiaisonDocument5 pagesCaractères de LiaisonGuy Effa100% (1)
- Construction Des Arcs de RaccordementDocument4 pagesConstruction Des Arcs de RaccordementHamza NassibPas encore d'évaluation
- Cours Bureau Etude - Methode-2021Document39 pagesCours Bureau Etude - Methode-2021Møtaz Lamraøui100% (1)
- Devoir Surveillé 2stm ProductionDocument8 pagesDevoir Surveillé 2stm ProductionOmar Daali100% (1)
- Usinage Par Enlevement de MatiereDocument8 pagesUsinage Par Enlevement de Matieremaraghni_hassine7592Pas encore d'évaluation
- Exam Tec Des CNC 2014Document2 pagesExam Tec Des CNC 2014Parc ElyesPas encore d'évaluation
- TCM Cours GIM 1 ZINE PDFDocument64 pagesTCM Cours GIM 1 ZINE PDFAbdelmajid AittalebPas encore d'évaluation
- TD Avant RattrapageDocument6 pagesTD Avant RattrapageBakary Biro100% (1)
- Chapitre 5Document13 pagesChapitre 5Mou Héb RzPas encore d'évaluation
- Partie 1Document4 pagesPartie 1Amal Hammami Ep SghaierPas encore d'évaluation
- Etude Cinematique Du Etude Cinematique Du Cric Electrique Cric ElectriqueDocument4 pagesEtude Cinematique Du Etude Cinematique Du Cric Electrique Cric Electriquemmnlbrice67% (3)
- 1-Le Schéma Cinématique Des MécanismesDocument8 pages1-Le Schéma Cinématique Des MécanismesSegaAlainCoulibalyPas encore d'évaluation
- Apportdestechniques Floues Etpossibilistesa Lanalysesemiquantitative Des Risques IndustrielsDocument66 pagesApportdestechniques Floues Etpossibilistesa Lanalysesemiquantitative Des Risques IndustrielsARSENE BRICE NDEMA BOMEPas encore d'évaluation
- Metrologie Tci3Document58 pagesMetrologie Tci3ARSENE BRICE NDEMA BOMEPas encore d'évaluation
- MDMS PDFDocument35 pagesMDMS PDFbtpniainaPas encore d'évaluation
- Cahier Des Charges TracteurDocument1 pageCahier Des Charges TracteurARSENE BRICE NDEMA BOMEPas encore d'évaluation
- Cours Procédés Mise FormeDocument80 pagesCours Procédés Mise Formesvans lmsvansi100% (3)
- F213 TD Corrigés PDFDocument102 pagesF213 TD Corrigés PDFYoussef BouhiaPas encore d'évaluation
- Pfe GM 0248 PDFDocument93 pagesPfe GM 0248 PDFskaina aymenPas encore d'évaluation
- Ait Slimane, Brahim Belhadj, LiliaDocument88 pagesAit Slimane, Brahim Belhadj, LiliaARSENE BRICE NDEMA BOMEPas encore d'évaluation
- Poutres Hyperstatiques SimplesDocument21 pagesPoutres Hyperstatiques SimplesKorichiKarimPas encore d'évaluation
- Document Complet 28-03-2007version Adob PDFDocument208 pagesDocument Complet 28-03-2007version Adob PDFHakouka M'jPas encore d'évaluation
- Le Soudage À L'arc Électrique TIG1Document27 pagesLe Soudage À L'arc Électrique TIG1frorenaPas encore d'évaluation
- Soudage TIG - WikipédiaDocument8 pagesSoudage TIG - WikipédiaARSENE BRICE NDEMA BOMEPas encore d'évaluation
- Manuel Qualité Sertissage PDFDocument53 pagesManuel Qualité Sertissage PDFJamal FararePas encore d'évaluation
- Moteur À Deux TempsDocument2 pagesMoteur À Deux TempsIkram Ait AbdellahPas encore d'évaluation
- M08 - Alimentation Classique - CarburateurDocument7 pagesM08 - Alimentation Classique - CarburateurMustapha BoufousPas encore d'évaluation
- Fiche Technique Des Vis S-MD 05 S Fiche Technique ASSET DOC LOC 2456617Document2 pagesFiche Technique Des Vis S-MD 05 S Fiche Technique ASSET DOC LOC 2456617Yola MundaboPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - 1ère AS (2011-2012) MR Boubaker - Hassen PDFDocument6 pagesDevoir de Synthèse N°1 - Technologie - 1ère AS (2011-2012) MR Boubaker - Hassen PDFAmir AbidPas encore d'évaluation
- Cours Elm M1 MCCDocument8 pagesCours Elm M1 MCCAbdo AbdoPas encore d'évaluation
- Année 2021Document15 pagesAnnée 2021le gamerrrPas encore d'évaluation
- BearingQuickReferenceGuide FR WebDocument20 pagesBearingQuickReferenceGuide FR Webabdelhadi houssinPas encore d'évaluation
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFDocument5 pagesDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocinePas encore d'évaluation
- الامتحان الوطني في علوم المهندس 2022 مسلك علوم رياضية ب الدورة العاديةDocument28 pagesالامتحان الوطني في علوم المهندس 2022 مسلك علوم رياضية ب الدورة العاديةAnwar Ben LamlihPas encore d'évaluation
- Peugeot Systeme Dinjection Indirecte PeugeotDocument22 pagesPeugeot Systeme Dinjection Indirecte Peugeotjorge Angel Lope100% (1)
- Comment Changer - Roulement de Roue Avant Sur VW Golf 3 - Guide de RemplacementDocument27 pagesComment Changer - Roulement de Roue Avant Sur VW Golf 3 - Guide de Remplacementpascal brochardPas encore d'évaluation
- BB2010-Dossier Technique PDFDocument9 pagesBB2010-Dossier Technique PDFspectrum66100% (1)
- Manuel D'entretien: Série 4000 PerkinsDocument48 pagesManuel D'entretien: Série 4000 PerkinsSounkarou CamaraPas encore d'évaluation
- A6LF1 IntroductionDocument62 pagesA6LF1 IntroductionAlvaro Euan94% (33)
- Caren FRDocument4 pagesCaren FRriadhPas encore d'évaluation
- BON COURS Circuit-De-Demarrage - MiardDocument16 pagesBON COURS Circuit-De-Demarrage - Miardالمركز الخاص بالتكوين المهنيPas encore d'évaluation
- tp1 Moteur ThermiqueDocument4 pagestp1 Moteur ThermiqueAymen NasrPas encore d'évaluation
- Guidage en Translation StratégieDocument4 pagesGuidage en Translation StratégieakouPas encore d'évaluation
- Cours No.3Document71 pagesCours No.3Wolfpackxx86100% (1)
- Foreuse Domine Dch218Document3 pagesForeuse Domine Dch218aminesaPas encore d'évaluation
- Les Chambres de CombustionDocument4 pagesLes Chambres de CombustionJérômePas encore d'évaluation
- 16M-CHECK LIST CorrigésDocument25 pages16M-CHECK LIST CorrigésCarlosPas encore d'évaluation
- OutillageDocument108 pagesOutillageNico Gt-turbo100% (1)
- Sujet2 - Bride de SerrageDocument4 pagesSujet2 - Bride de SerrageMohsen Laabidi100% (3)
- IndicesDocument1 pageIndicesAbdelazie SakerPas encore d'évaluation
- CatalogueDocument122 pagesCatalogueMrr OulhamriPas encore d'évaluation
- Exercice:HYDRAULIQUEDocument6 pagesExercice:HYDRAULIQUEazzeddine eddhahraouy20Pas encore d'évaluation
- Manuel Atelier Dink Street 125i en FrancaisDocument257 pagesManuel Atelier Dink Street 125i en Francaislioferliofer67% (3)
- Nemo Hand BookDocument132 pagesNemo Hand BookTurbot30Pas encore d'évaluation
- Chapitre II Machine SynchroneDocument10 pagesChapitre II Machine Synchroneanis adjissiPas encore d'évaluation