Vous aimerez peut-être aussi
- Sciences Industrielles Pour L'Ingénieur I Filière TSIDocument22 pagesSciences Industrielles Pour L'Ingénieur I Filière TSIKhaled SouaissaPas encore d'évaluation
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Expertise MaritimeDocument9 pagesExpertise MaritimelacothPas encore d'évaluation
- 580 680 570 670 Reparatie PDFDocument309 pages580 680 570 670 Reparatie PDFGeorge Geo75% (4)
- Cours Sur Le Disque DurDocument11 pagesCours Sur Le Disque DurHabib FayePas encore d'évaluation
- 4.1 S Erie de FourierDocument13 pages4.1 S Erie de FourierJamila DebayaPas encore d'évaluation
- TD D'automatique, LP/TSEI S5, Série N°3: Exercice 1: Stabilité Des SystèmesDocument1 pageTD D'automatique, LP/TSEI S5, Série N°3: Exercice 1: Stabilité Des SystèmesAyman LamzouriPas encore d'évaluation
- Analyse Des Systemes Lineaires Continus Dans Le Domaine TemporelDocument17 pagesAnalyse Des Systemes Lineaires Continus Dans Le Domaine TemporelBasma BENESSALIHPas encore d'évaluation
- Cours FiltrageDocument10 pagesCours Filtragenagazi moezPas encore d'évaluation
- TD Filtres PDFDocument2 pagesTD Filtres PDFbenhasamPas encore d'évaluation
- Chapitre II - SNL - Plan de PhaseDocument68 pagesChapitre II - SNL - Plan de PhaseThinhinane KaguyaPas encore d'évaluation
- TDChapitre1 2corrigDocument10 pagesTDChapitre1 2corrigØthmane HđPas encore d'évaluation
- TP 2 GMDVDocument6 pagesTP 2 GMDVmewguv Ahmed salekPas encore d'évaluation
- Solution td1Document9 pagesSolution td1Khalil elkPas encore d'évaluation
- TD 1 Correction - 1Document6 pagesTD 1 Correction - 1Soufiane Frahtia30Pas encore d'évaluation
- Exercice CapteurDocument7 pagesExercice CapteurDjamel BENNOUR100% (1)
- Analyse Temporelle Des Systemes Lti: 1. ObjectifDocument10 pagesAnalyse Temporelle Des Systemes Lti: 1. ObjectifCarlPas encore d'évaluation
- s1 TN En1 2011 CompletDocument29 pagess1 TN En1 2011 CompletHakimAliouaPas encore d'évaluation
- Epreuve + Corrigé-Type - Devoir Surveillé Automatique-Asservissement - Juin 2021 - Tous CentresDocument10 pagesEpreuve + Corrigé-Type - Devoir Surveillé Automatique-Asservissement - Juin 2021 - Tous CentresGael ODJOPas encore d'évaluation
- TD 2Document2 pagesTD 2youssefPas encore d'évaluation
- Filtres Électronique - Cours D'électroniqueDocument3 pagesFiltres Électronique - Cours D'électroniqueMeyssa TéléPas encore d'évaluation
- TD2 Réponses Des Systèmes LinéairesDocument2 pagesTD2 Réponses Des Systèmes LinéairesYasser YasserPas encore d'évaluation
- CapteurDocument4 pagesCapteuryasser kingPas encore d'évaluation
- Chapitre Systéme TriphaséDocument18 pagesChapitre Systéme TriphaséMokhtar BesseghierPas encore d'évaluation
- Suite Cours LicenceDocument30 pagesSuite Cours LicenceIlyas khadrouniPas encore d'évaluation
- Résumé AsservissementDocument58 pagesRésumé Asservissementahmed kitariPas encore d'évaluation
- Régulation PID PDFDocument15 pagesRégulation PID PDFAmine AzaoumPas encore d'évaluation
- Cours Cha1 Chap2 de QECEMDocument17 pagesCours Cha1 Chap2 de QECEMMadani AmouraPas encore d'évaluation
- Filtre Pass BasDocument12 pagesFiltre Pass Basdettlaff xxxPas encore d'évaluation
- Les Compteurs Et Les Décompteurs.Document19 pagesLes Compteurs Et Les Décompteurs.Khadija Ait MhamedPas encore d'évaluation
- Examen2020 SAEDocument1 pageExamen2020 SAEsami BoumendjelPas encore d'évaluation
- ATS Genie-Electrique 2001 ATSDocument7 pagesATS Genie-Electrique 2001 ATSDerek NelsonPas encore d'évaluation
- TP MN N°1Document3 pagesTP MN N°1Ahmed AqvayliPas encore d'évaluation
- 2 - 2 / Les Montages Redresseurs À DiodesDocument68 pages2 - 2 / Les Montages Redresseurs À DiodesSahbi MarrouchiPas encore d'évaluation
- Ch6Systèmedesecondordre EtudetemporelleDocument7 pagesCh6Systèmedesecondordre EtudetemporelleYVANPas encore d'évaluation
- Correction TD N°1 Systèmes ÉchantillonnésDocument4 pagesCorrection TD N°1 Systèmes Échantillonnésba 3uPas encore d'évaluation
- 02 BANC de Jauges de DéformationsDocument28 pages02 BANC de Jauges de Déformationsyoussef sahelPas encore d'évaluation
- TD CNSDocument3 pagesTD CNSHim Ibrah100% (1)
- Examen 2012 CorrigeDocument3 pagesExamen 2012 CorrigeIssam Mob0% (1)
- TD N°2 Fonctions de L'electronique : Oscillateurs Quasi-SinusoïdauxDocument5 pagesTD N°2 Fonctions de L'electronique : Oscillateurs Quasi-SinusoïdauxÆn RåçhPas encore d'évaluation
- TP Arithmétique Binaire (TP N°1)Document2 pagesTP Arithmétique Binaire (TP N°1)abir saal100% (1)
- 4 Fonction de TransfertDocument18 pages4 Fonction de TransfertAna SmaalPas encore d'évaluation
- Chapitre II Système 1ier OrdreDocument13 pagesChapitre II Système 1ier OrdreHamou WaltPas encore d'évaluation
- TD 4 Correction - 4Document8 pagesTD 4 Correction - 4Soufiane Frahtia30Pas encore d'évaluation
- Sup'Ptic: Itt2 ANNEE ACADEMIQUE 2017-2018Document2 pagesSup'Ptic: Itt2 ANNEE ACADEMIQUE 2017-2018Angel100% (1)
- Rapport Alternateur (Autosaved) (Recovered)Document22 pagesRapport Alternateur (Autosaved) (Recovered)RabbiPas encore d'évaluation
- TD01 Chaines de Mesure Et CapteursDocument1 pageTD01 Chaines de Mesure Et Capteurssalah fcbPas encore d'évaluation
- Exercices Appareillage ElectriqueDocument19 pagesExercices Appareillage Electriqueouttasmarwane12Pas encore d'évaluation
- Correction TD2 PDFDocument11 pagesCorrection TD2 PDFSaihi OussemaPas encore d'évaluation
- Examen de Examen de Rattrapage Système Asservis 2017 2016Document1 pageExamen de Examen de Rattrapage Système Asservis 2017 2016Azeddine Dem100% (1)
- EXAMENDocument6 pagesEXAMENAnonymous ti2O8K7rYPas encore d'évaluation
- Exam 2020 Geseer - GecsiDocument3 pagesExam 2020 Geseer - GecsiKooraNow HDPas encore d'évaluation
- Examen 2019Document2 pagesExamen 2019Wï ÄmPas encore d'évaluation
- Installations Particulières Des #AERODROMESDocument29 pagesInstallations Particulières Des #AERODROMESAbdeladim el moubarhinePas encore d'évaluation
- Série de TD N: 2: Exercice 1Document3 pagesSérie de TD N: 2: Exercice 1Hafa ApbPas encore d'évaluation
- Explicatif Ferromagntique-MagnétoélectriqueDocument4 pagesExplicatif Ferromagntique-MagnétoélectriqueBidulPas encore d'évaluation
- TP2 Machines ElectriquesDocument6 pagesTP2 Machines ElectriquesHamza HachimPas encore d'évaluation
- TP Signaux Et Systemes TP N°6: Modulation de Fréquence ObjectifDocument8 pagesTP Signaux Et Systemes TP N°6: Modulation de Fréquence ObjectifAymen Bt100% (2)
- Chiii Redressement Non Commande Pd2Document7 pagesChiii Redressement Non Commande Pd2koffi gerardPas encore d'évaluation
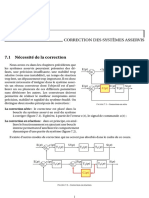
- Sii en Psi Correction Des SaDocument33 pagesSii en Psi Correction Des SaTal ElPas encore d'évaluation
- ESC 1 EmbryageDocument2 pagesESC 1 EmbryageHamza Machmoure100% (1)
- LettreDocument3 pagesLettrelacothPas encore d'évaluation
- BioclimatiqueDocument12 pagesBioclimatiquelacothPas encore d'évaluation
- NDI Guidemethodo PDFDocument27 pagesNDI Guidemethodo PDFAyoub BourouisPas encore d'évaluation
- Confort ThermiqueDocument14 pagesConfort Thermiquelacoth100% (2)
- Comptabilite EnergetiqueDocument10 pagesComptabilite EnergetiquelacothPas encore d'évaluation
- Ressource EclairageDocument10 pagesRessource Eclairagelacoth100% (1)
- Manuel QSE SogabelDocument31 pagesManuel QSE Sogabellacoth100% (1)
- Chap 1Document75 pagesChap 1lacothPas encore d'évaluation
- Les ClimatsDocument1 pageLes ClimatsAgnès FromentPas encore d'évaluation
- BATTERIESDocument9 pagesBATTERIESlacoth100% (1)
- 725 Mooc DD 2018 PDFDocument108 pages725 Mooc DD 2018 PDFInes KaghoPas encore d'évaluation
- LogicielDocument6 pagesLogiciellacothPas encore d'évaluation
- CONFORT VISUE FinalDocument4 pagesCONFORT VISUE FinallacothPas encore d'évaluation
- Politique Defficacite Energetique de La CedeaoDocument74 pagesPolitique Defficacite Energetique de La CedeaodiopPas encore d'évaluation
- Politique Defficacite Energetique de La CedeaoDocument74 pagesPolitique Defficacite Energetique de La CedeaodiopPas encore d'évaluation
- Plan Audit SMEdans L'entrepriseDocument25 pagesPlan Audit SMEdans L'entrepriselacoth100% (1)
- Annonce Formation Reglementation IFDD CEREF Juin 2018Document8 pagesAnnonce Formation Reglementation IFDD CEREF Juin 2018lacothPas encore d'évaluation
- TomeDocument188 pagesTomelacothPas encore d'évaluation
- Optimiser L'éclairage Naturel Pour Le Confort VisuelDocument124 pagesOptimiser L'éclairage Naturel Pour Le Confort VisuellacothPas encore d'évaluation
- Annonce Formation Reglementation IFDD CEREF Juin 2018Document8 pagesAnnonce Formation Reglementation IFDD CEREF Juin 2018lacothPas encore d'évaluation
- Annonce Formation Reglementation IFDD CEREF Juin 2018Document8 pagesAnnonce Formation Reglementation IFDD CEREF Juin 2018lacothPas encore d'évaluation
- Fiche Demande PasseportDocument1 pageFiche Demande PasseportlacothPas encore d'évaluation
- Puitscanadien PDFDocument59 pagesPuitscanadien PDFbertrand_0123456789Pas encore d'évaluation
- TomeDocument188 pagesTomelacothPas encore d'évaluation
- Puitscanadien PDFDocument59 pagesPuitscanadien PDFbertrand_0123456789Pas encore d'évaluation
- TomeDocument188 pagesTomelacothPas encore d'évaluation
- 30 Calcul PuitDocument2 pages30 Calcul Puitlacoth100% (1)
- TomeDocument188 pagesTomelacothPas encore d'évaluation
- Eies Voirie OuedoDocument157 pagesEies Voirie OuedolacothPas encore d'évaluation
- 5156 Tfca U11 13 Dossier SujetDocument7 pages5156 Tfca U11 13 Dossier SujetFawzi HelouPas encore d'évaluation
- Poteaux en Béton Pour Lignes Électriques Aériennes: Specification TechniqueDocument8 pagesPoteaux en Béton Pour Lignes Électriques Aériennes: Specification TechniqueKaoutar El-ghazouiPas encore d'évaluation
- Cours Simplifie La Liaison CompleteDocument3 pagesCours Simplifie La Liaison CompleteMohammed DahbiPas encore d'évaluation
- Analyse Fonctionnel PROJETDocument8 pagesAnalyse Fonctionnel PROJETMajda BelkhaouiPas encore d'évaluation
- Note de Calcul PoutreDocument6 pagesNote de Calcul PoutreAno Nymous ProPas encore d'évaluation
- 4 HG0201 Enonce PDFDocument2 pages4 HG0201 Enonce PDFbougherara100% (1)
- XMLRPCDocument4 pagesXMLRPCElhadji Malick GayePas encore d'évaluation
- 4-FT Technoseal 20 VV 60 F.FDocument2 pages4-FT Technoseal 20 VV 60 F.Fconstantine2008Pas encore d'évaluation
- Cours C++Document501 pagesCours C++Sara AbPas encore d'évaluation
- Emd2 Info4 2014Document2 pagesEmd2 Info4 2014Amar AlichePas encore d'évaluation
- L'Usine Marémotrice de La RanceDocument45 pagesL'Usine Marémotrice de La RanceSalem ARIFPas encore d'évaluation
- 760 PontsDocument74 pages760 PontsSarrauste JulienPas encore d'évaluation
- Examen Mecanique Du SolDocument2 pagesExamen Mecanique Du SolgoboPas encore d'évaluation
- Filtrage en RadarDocument177 pagesFiltrage en RadarMariamPas encore d'évaluation
- Eau Chaude Sanitaire PDFDocument8 pagesEau Chaude Sanitaire PDFcp1r3s0% (1)
- As 70671 LR-Z SG 470FR FR 1056-2Document2 pagesAs 70671 LR-Z SG 470FR FR 1056-2a.ghani BaRaCuDaPas encore d'évaluation
- Chroniques Oubliées Contemporain - Recueil de ScénariosDocument106 pagesChroniques Oubliées Contemporain - Recueil de ScénariosAZERTY QWERTYH100% (1)
- Renoform TD 2010Document2 pagesRenoform TD 2010angel de mi guardaPas encore d'évaluation
- IsostatismeDocument36 pagesIsostatismedidinedPas encore d'évaluation
- TC Qqla 27464Document174 pagesTC Qqla 27464Sabri Naima GhoutiaPas encore d'évaluation
- Tutoriel Etablissements Origine Adele FRDocument7 pagesTutoriel Etablissements Origine Adele FRPamela TitoPas encore d'évaluation
- TS Phy Chap6 PDFDocument11 pagesTS Phy Chap6 PDFnizar hadhriPas encore d'évaluation
- IND2201 PresentationDocument2 pagesIND2201 PresentationCharles-André GuénettePas encore d'évaluation
- Beton Arme Cours Complet Chap9 PDFDocument47 pagesBeton Arme Cours Complet Chap9 PDFTOVIHO SessinouPas encore d'évaluation
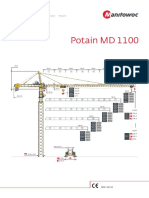
- R3t1fnhswjbl9uxvpotain MD 1100 Tower Crane NetworkDocument8 pagesR3t1fnhswjbl9uxvpotain MD 1100 Tower Crane Networkubeydullah coşkunPas encore d'évaluation
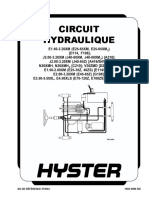
- Circuit HydrauliqDocument90 pagesCircuit Hydrauliqsafwen ranenPas encore d'évaluation
- STR00 - FONDATIONS - RESEAUX SOUS-DALLE-Layout1Document1 pageSTR00 - FONDATIONS - RESEAUX SOUS-DALLE-Layout1dimitri tchabouPas encore d'évaluation
- Plafond Filtrant: Dimensions GénériquesDocument1 pagePlafond Filtrant: Dimensions GénériquesDjamal MohammediPas encore d'évaluation