Vous aimerez peut-être aussi
- TD3 - Systems Boucles Stabilite - Precision - Rapidité 2024Document2 pagesTD3 - Systems Boucles Stabilite - Precision - Rapidité 2024elmehdi.elkhoutiPas encore d'évaluation
- 144 Tdautomatique Tsi SpeDocument4 pages144 Tdautomatique Tsi SpeYoussef SadikPas encore d'évaluation
- TDN°1Document4 pagesTDN°1samad marPas encore d'évaluation
- DS Auto MT3 2020Document1 pageDS Auto MT3 2020Achille TsakasPas encore d'évaluation
- CR TP5 Modele PDFDocument8 pagesCR TP5 Modele PDFIslem BranciPas encore d'évaluation
- Automatique Juin2013Document6 pagesAutomatique Juin2013brahim nfaaPas encore d'évaluation
- Sujets Des Concours Doctorat en Electromécanique - Eloued 2022 - 2Document14 pagesSujets Des Concours Doctorat en Electromécanique - Eloued 2022 - 2Master 2 ElectromecaniquePas encore d'évaluation
- Premier - Ordre TPDocument5 pagesPremier - Ordre TPYahya MohamedPas encore d'évaluation
- Exam Cin 2 R22 Rattrapage 2Document11 pagesExam Cin 2 R22 Rattrapage 2elisatorres83500Pas encore d'évaluation
- Exercice AsservissementDocument8 pagesExercice Asservissementbrahim nfaaPas encore d'évaluation
- TD AsservissementDocument8 pagesTD AsservissementArmand EssPas encore d'évaluation
- TD5 AsservissementDocument1 pageTD5 AsservissementPape NdiayePas encore d'évaluation
- TD AsservissementDocument9 pagesTD AsservissementAyoub ELJAFRYPas encore d'évaluation
- Controle Auto S3 2006Document4 pagesControle Auto S3 2006Riche MabouilaPas encore d'évaluation
- Correction de Portée LumineuseDocument26 pagesCorrection de Portée LumineuseMeziane Achraf100% (1)
- Regulation Et Asservissement 1Document4 pagesRegulation Et Asservissement 1TECHNOLOGIES MODERNES DU CAMEROUNPas encore d'évaluation
- Td2 Master SanDocument3 pagesTd2 Master SanMahrez DerdoumPas encore d'évaluation
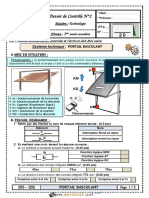
- Devoir de Contrôle N°2 - Technologie - PORTAIL BASCULANT - 1ère AS (2015-2016) MR RAOUAFI - Abdallah PDFDocument3 pagesDevoir de Contrôle N°2 - Technologie - PORTAIL BASCULANT - 1ère AS (2015-2016) MR RAOUAFI - Abdallah PDFAnta diama sambePas encore d'évaluation
- TD5 - Correction Des Systèmes Asservis ÉchantillonnésDocument8 pagesTD5 - Correction Des Systèmes Asservis ÉchantillonnésZakaria ZianePas encore d'évaluation
- Epreuve 1Document6 pagesEpreuve 1ChristianPas encore d'évaluation
- Aii2 RCNS TP1Document2 pagesAii2 RCNS TP1mouniaPas encore d'évaluation
- TD 05Document2 pagesTD 05meriemfrik2Pas encore d'évaluation
- ds1 11 2023Document4 pagesds1 11 2023najmimohamed176Pas encore d'évaluation
- TP 3 Version FinalDocument18 pagesTP 3 Version FinalZH HamzaPas encore d'évaluation
- Informatique La Recursivite L Algorithme D Euclide Implementation en PythonDocument8 pagesInformatique La Recursivite L Algorithme D Euclide Implementation en PythonanisagrebiPas encore d'évaluation
- Chapitre 2Document7 pagesChapitre 2aniss belhouchetPas encore d'évaluation
- TD3 CSLDocument4 pagesTD3 CSLgamerzxs681Pas encore d'évaluation
- TD Regul PDFDocument11 pagesTD Regul PDFSouhaib LoudaPas encore d'évaluation
- TD AsservissementDocument8 pagesTD AsservissementMohamed OuddourPas encore d'évaluation
- Aucun Document N'est AutoriséDocument3 pagesAucun Document N'est AutorisébayebiramaniassePas encore d'évaluation
- Compte Rendu - TP3 SADJI Ramy 181831064076Document5 pagesCompte Rendu - TP3 SADJI Ramy 181831064076Ramy SdjPas encore d'évaluation
- TP AUtoDocument8 pagesTP AUtoamine cheurfaPas encore d'évaluation
- NN NNNNNNNNN NNNNNNNNN NNNNNNNNNDocument15 pagesNN NNNNNNNNN NNNNNNNNN NNNNNNNNNDaouda GouemPas encore d'évaluation
- Exercice 1:: TD° 3: Électronique AnalogiqueDocument2 pagesExercice 1:: TD° 3: Électronique AnalogiqueAssia BourtiPas encore d'évaluation
- TD3 FinalDocument5 pagesTD3 FinallinaajnaouPas encore d'évaluation
- Devoir Libre 1Document15 pagesDevoir Libre 1Lamyae AMMARIPas encore d'évaluation
- TD Régulation EMSI Série 2Document5 pagesTD Régulation EMSI Série 2SalabPas encore d'évaluation
- DS1 MPSI1 Novembre 23Document6 pagesDS1 MPSI1 Novembre 23leolapoutgePas encore d'évaluation
- Final1 Reg 2015 2016Document10 pagesFinal1 Reg 2015 2016omarsahraoui240Pas encore d'évaluation
- Serie TD 004 GP 2021-2022Document2 pagesSerie TD 004 GP 2021-2022yassamine lagrafPas encore d'évaluation
- Chapitre 2 LAT51Document50 pagesChapitre 2 LAT51Aķ RamPas encore d'évaluation
- ELE2700 ExamenFinal 2021Document25 pagesELE2700 ExamenFinal 2021rabissePas encore d'évaluation
- Analyse Transtoire Sys Ordre 2Document1 pageAnalyse Transtoire Sys Ordre 2AFADPas encore d'évaluation
- Ds2003 2Document3 pagesDs2003 2bayebiramaniassePas encore d'évaluation
- TP 2 RegulationDocument8 pagesTP 2 RegulationTAHA YASSINEPas encore d'évaluation
- ExercicesDocument7 pagesExercicesTasnim amdouniPas encore d'évaluation
- Travaux Diriges, Exercices, Annales DS: Département Automatique 2002-2003 Hei3 TC Regulation IndustrielleDocument60 pagesTravaux Diriges, Exercices, Annales DS: Département Automatique 2002-2003 Hei3 TC Regulation IndustrielleBafing DOSSO100% (1)
- TD 3 Etude Des Systèmes DynamiquesDocument5 pagesTD 3 Etude Des Systèmes Dynamiqueskhaled hammiPas encore d'évaluation
- TP 02: Régulation de La Température D'une Enceinte À Chauffage IndirecteDocument2 pagesTP 02: Régulation de La Température D'une Enceinte À Chauffage Indirectedjawedd34Pas encore d'évaluation
- Ds Salc2020Document3 pagesDs Salc2020Abir HammamiPas encore d'évaluation
- EMD STRM2 - 2019 (Rattrapage) (Corrigé)Document4 pagesEMD STRM2 - 2019 (Rattrapage) (Corrigé)nait amara zaidPas encore d'évaluation
- Document Réponse TP2 PID - Num 2022 - 2023Document10 pagesDocument Réponse TP2 PID - Num 2022 - 2023Zerrouk AthmanPas encore d'évaluation
- S Quence 3 - Recueil D'exercices - Partie 2 - Corrig Exos 1 4Document13 pagesS Quence 3 - Recueil D'exercices - Partie 2 - Corrig Exos 1 4romainbaharianPas encore d'évaluation
- TP Scilab BodeDocument11 pagesTP Scilab BodeMohamed LahninePas encore d'évaluation
- TD3 Régulation-Asservissement Oct2019Document7 pagesTD3 Régulation-Asservissement Oct2019TECHNOLOGIES MODERNES DU CAMEROUN50% (2)
- TP3 Étude Temporelle Et Fréquentielle Des Systèmes Premier Ordre Et Deuxième Ordre en Utilisant MATLAB/SIMULINKDocument6 pagesTP3 Étude Temporelle Et Fréquentielle Des Systèmes Premier Ordre Et Deuxième Ordre en Utilisant MATLAB/SIMULINKbachar soumiaPas encore d'évaluation
- TD1 2021 2022Document2 pagesTD1 2021 2022Salah Eddine MaimouniPas encore d'évaluation
- GegmDocument6 pagesGegmAhmed LaoudiPas encore d'évaluation
- TP Asservissement MODELISATION ANALOGIQUE ET SIMULATION DESDocument11 pagesTP Asservissement MODELISATION ANALOGIQUE ET SIMULATION DESbadre989Pas encore d'évaluation
- Rapport Du Stage Effectué Au College Sidi MaafaDocument19 pagesRapport Du Stage Effectué Au College Sidi MaafaAyyoub MbarkiPas encore d'évaluation
- Activites Masse Et PoidsDocument2 pagesActivites Masse Et PoidsMatt gamePas encore d'évaluation
- Les Grands Penseurs Du Langage-2019Document129 pagesLes Grands Penseurs Du Langage-2019Jaâfar NASRANEPas encore d'évaluation
- Analyse Comparative de La Met Et de La MebDocument23 pagesAnalyse Comparative de La Met Et de La MebSoumaïla OuédraogoPas encore d'évaluation
- CC 2 CommandeDocument2 pagesCC 2 CommandeChampion NgangoumPas encore d'évaluation
- Logique 23 - 24Document62 pagesLogique 23 - 24Kouassi GnankanPas encore d'évaluation
- Traité de Santé Et de Longevité ActiveDocument32 pagesTraité de Santé Et de Longevité ActiveThomas Desrosiers100% (1)
- 3 Cra Developper Les Perf de L'espace Co & Eval Action Co E42Document5 pages3 Cra Developper Les Perf de L'espace Co & Eval Action Co E42claude.cadassePas encore d'évaluation
- Cours Automatisme Première PartieDocument32 pagesCours Automatisme Première PartieRabbiPas encore d'évaluation
- Relation Caraman Siege-ConstantineDocument88 pagesRelation Caraman Siege-ConstantineAbdelaziz ArdjPas encore d'évaluation
- 2017 Nassori DouniaDocument158 pages2017 Nassori DouniaMohamedElKatarPas encore d'évaluation
- Cahier Technique BD 21-12-11Document16 pagesCahier Technique BD 21-12-11ThareaultPas encore d'évaluation
- Projet Master RechercheDocument10 pagesProjet Master RecherchelidvinekennePas encore d'évaluation
- 1MRK505366-BFR B FR Guide de L Acheteur Protection Differentielle de Ligne RED650 2.1Document82 pages1MRK505366-BFR B FR Guide de L Acheteur Protection Differentielle de Ligne RED650 2.1Top TopPas encore d'évaluation
- Équipement: Une Aventure ExtraordinaireDocument119 pagesÉquipement: Une Aventure ExtraordinaireLa PerformancePas encore d'évaluation
- Nperrin 2005 - La Méthode Inductive, Un Outil Pertinent Pour La Formation Par La RechercheDocument16 pagesNperrin 2005 - La Méthode Inductive, Un Outil Pertinent Pour La Formation Par La RechercheNPPas encore d'évaluation
- Maintenance 2007 UltrasonsDocument79 pagesMaintenance 2007 Ultrasonsmarmara161616Pas encore d'évaluation
- Leçon 1 Communication MédiasDocument8 pagesLeçon 1 Communication MédiashaidaraPas encore d'évaluation
- Ecluses Csne Groupement OneDocument3 pagesEcluses Csne Groupement OnebediangPas encore d'évaluation
- Hicham 12Document2 pagesHicham 12Hicham KhalPas encore d'évaluation
- Support Cours Itil4Document158 pagesSupport Cours Itil4Kamel KhelifiPas encore d'évaluation
- Bal - 21000-05-03 LTM 1200-5.1Document1 702 pagesBal - 21000-05-03 LTM 1200-5.1Mamadou djibril Ba100% (2)
- 1C Theme 4 PDFDocument20 pages1C Theme 4 PDFphilippe dmtPas encore d'évaluation
- Exercice Sur Les MomentsDocument3 pagesExercice Sur Les MomentsDiagne100% (3)
- Examen TribologieDocument10 pagesExamen TribologieHatem HamekPas encore d'évaluation
- Les Isolateurs Et L'industrie Pharmaceutique - Des Amis de 30 AnsDocument4 pagesLes Isolateurs Et L'industrie Pharmaceutique - Des Amis de 30 AnsSasha LebonPas encore d'évaluation
- Fiches de Maths Pour Le BrevetDocument5 pagesFiches de Maths Pour Le BrevetMaelys BressonPas encore d'évaluation
- Evalu Perfor Analy Du Biuret.Document3 pagesEvalu Perfor Analy Du Biuret.NouriPas encore d'évaluation
- TD Chimie 3em 1Document8 pagesTD Chimie 3em 1LAWSON NICOLASPas encore d'évaluation
- 11 UnesequencedequatriemeDocument12 pages11 UnesequencedequatriemeMax FournierPas encore d'évaluation
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Le Minage De Bitcoin 101: Le Guide du Débutant de Bitcoin Pour Faire de L'argent Avec Des BitcoinsD'EverandLe Minage De Bitcoin 101: Le Guide du Débutant de Bitcoin Pour Faire de L'argent Avec Des BitcoinsÉvaluation : 4 sur 5 étoiles4/5 (1)
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Scrum - Le Guide Ultime des Méthodes Agiles Essentielles de Scrum!D'EverandScrum - Le Guide Ultime des Méthodes Agiles Essentielles de Scrum!Pas encore d'évaluation
- Les 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonD'EverandLes 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonPas encore d'évaluation
- La particule de temps: Une approche quantique du tempsD'EverandLa particule de temps: Une approche quantique du tempsPas encore d'évaluation
- Les singularités comme limites ontologiques de la relativité généraleD'EverandLes singularités comme limites ontologiques de la relativité généralePas encore d'évaluation
- Les Êtres Vivants Dépendent De La Mécanique QuantiqueD'EverandLes Êtres Vivants Dépendent De La Mécanique QuantiquePas encore d'évaluation
- Du Néant à la Formule Universelle et retour: La structure des particules élémentaires XIIIfD'EverandDu Néant à la Formule Universelle et retour: La structure des particules élémentaires XIIIfPas encore d'évaluation