Vous aimerez peut-être aussi
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Polycopié Des Travaux Dirigés de Mécanique Du PointDocument43 pagesPolycopié Des Travaux Dirigés de Mécanique Du PointNisrine Nisrinita50% (2)
- SERIE TD2 - Cinematique - 2020 2021Document10 pagesSERIE TD2 - Cinematique - 2020 2021Awatif BePas encore d'évaluation
- Cinematique Du Solide PDFDocument60 pagesCinematique Du Solide PDFSameh Oussama100% (5)
- Poussoir HydrauliqueDocument6 pagesPoussoir HydrauliqueFosseni DialloPas encore d'évaluation
- M13-Etude Coffrage Ferraillage Éléments porteur-BTP-TDBDocument71 pagesM13-Etude Coffrage Ferraillage Éléments porteur-BTP-TDBDriss Benomar100% (13)
- Support Du Cours de Mécanique Du PointDocument56 pagesSupport Du Cours de Mécanique Du PointYoussef ChoucharPas encore d'évaluation
- Chap1 TorseursDocument38 pagesChap1 TorseursChafik Abid100% (1)
- Rapport PFE FinalDocument87 pagesRapport PFE Finalmoez ben youssef100% (1)
- Cours Et TD MicaniqueDocument88 pagesCours Et TD Micaniquedroubga88% (8)
- TD N°1 Mecii SMP 14 15 PDFDocument5 pagesTD N°1 Mecii SMP 14 15 PDFTàHa SamihPas encore d'évaluation
- Exercices Corriges Mecanique Du Point PDFDocument124 pagesExercices Corriges Mecanique Du Point PDFPythagore De Samos100% (2)
- TD - N°2 - Meca II - SMP - 14 - 15Document7 pagesTD - N°2 - Meca II - SMP - 14 - 15TàHa Samih75% (4)
- Sécurité Sur Les Convoyeurs À Courroie PDFDocument85 pagesSécurité Sur Les Convoyeurs À Courroie PDFChristophe Schwartz100% (1)
- Injection Directe Essence PDFDocument7 pagesInjection Directe Essence PDFBa Hamzik HP100% (1)
- NF EN 13480-4 AC2 Tuyauterie Industrielle Métallique Fabrication Et InstallationDocument6 pagesNF EN 13480-4 AC2 Tuyauterie Industrielle Métallique Fabrication Et InstallationaminePas encore d'évaluation
- Pompe TriplexDocument23 pagesPompe TriplexBac mathPas encore d'évaluation
- TD Mecanique Generale l2 - FasciculeDocument14 pagesTD Mecanique Generale l2 - FasciculeBachirou GUEYEPas encore d'évaluation
- Formules de Changement de RepèreDocument3 pagesFormules de Changement de RepèreTopina Rahim100% (5)
- Piezo Common Rail PCR 2 DV4TD Ford (001 097)Document97 pagesPiezo Common Rail PCR 2 DV4TD Ford (001 097)Luc Mutombo MukuluPas encore d'évaluation
- TD Electromagnétiqme 1Document2 pagesTD Electromagnétiqme 1James WilfriedPas encore d'évaluation
- Chap 2Document16 pagesChap 2ZA CBPas encore d'évaluation
- 6-TD Les Torseurs 20-21 Et 21-22Document2 pages6-TD Les Torseurs 20-21 Et 21-22qrmshh596pPas encore d'évaluation
- Serie n3 Mp1Document3 pagesSerie n3 Mp1aydi abdelhediPas encore d'évaluation
- 10TD Mecanique Cinematique Du Point Semestre1Document4 pages10TD Mecanique Cinematique Du Point Semestre1Esli AmbinintsoaPas encore d'évaluation
- Rattrapage + Corrigé de Physique 1 ST 2008-2009 - Université de Béjaia PDFDocument4 pagesRattrapage + Corrigé de Physique 1 ST 2008-2009 - Université de Béjaia PDFRai newPas encore d'évaluation
- Avril 01Document5 pagesAvril 01Abdoulaye Boua BERTHEPas encore d'évaluation
- 152 Pince Ericc3 Version2Document2 pages152 Pince Ericc3 Version2Faical BharPas encore d'évaluation
- 152 Pince Ericc3 Version2Document2 pages152 Pince Ericc3 Version2Chaymae OuahmanePas encore d'évaluation
- 07 Mecanisme HireDocument1 page07 Mecanisme HirePoiloiPas encore d'évaluation
- Série 2+Document3 pagesSérie 2+samiasomatipro23Pas encore d'évaluation
- Serie4 09Document4 pagesSerie4 09donsimoPas encore d'évaluation
- SERIE 4 Changement RéférentielDocument3 pagesSERIE 4 Changement RéférentielOussama parkour. Red100% (1)
- X y y X: Les Coniques Exercice 1Document4 pagesX y y X: Les Coniques Exercice 1kathyPas encore d'évaluation
- Devoir de SI - 2Document5 pagesDevoir de SI - 2phollaPas encore d'évaluation
- TD N°1 Cinématique Du Solide Dérivation Temporelle - 2Document3 pagesTD N°1 Cinématique Du Solide Dérivation Temporelle - 2Kiki RotoPas encore d'évaluation
- Ennoncé de L'examen MS 14-15Document2 pagesEnnoncé de L'examen MS 14-15mohaPas encore d'évaluation
- Devoir SurveilléDocument1 pageDevoir Surveilléspartix84Pas encore d'évaluation
- SERIE TD2 - Cinematique - 2020 2021Document10 pagesSERIE TD2 - Cinematique - 2020 2021Nowe AhmadePas encore d'évaluation
- TD2 MP 2022-2023Document2 pagesTD2 MP 2022-2023RamboAkkkoPas encore d'évaluation
- Travaux Diriges Sur Le Changement de ReferentielDocument3 pagesTravaux Diriges Sur Le Changement de ReferentielThierry gbodamakouPas encore d'évaluation
- DS N°4 22-23 Du 20-02-2023OKDocument2 pagesDS N°4 22-23 Du 20-02-2023OKmangamanaPas encore d'évaluation
- Série 1-MECADocument13 pagesSérie 1-MECAabir balaPas encore d'évaluation
- Chapitre2 Robotique 2017Document28 pagesChapitre2 Robotique 2017askaricePas encore d'évaluation
- Y.Chair: Partie B: ÉlectromagnétismeDocument5 pagesY.Chair: Partie B: Électromagnétismeyassirtm el outmaniPas encore d'évaluation
- 2021-2022 - Chp2 - Cinématique VerEtudDocument9 pages2021-2022 - Chp2 - Cinématique VerEtudWissal ElPas encore d'évaluation
- DSN 108Document3 pagesDSN 108aydi abdelhediPas encore d'évaluation
- Exercice 1: CPGE - LIT - Marrakech Statique TD1 Pcsi1 OuikassiDocument1 pageExercice 1: CPGE - LIT - Marrakech Statique TD1 Pcsi1 Ouikassiakarne Youness100% (1)
- Satellite Terrestre-Erreur de Satellisation: OM e A e U D U D U C ADocument23 pagesSatellite Terrestre-Erreur de Satellisation: OM e A e U D U D U C Arien rien100% (1)
- Capexoc11-Deuxième Loi de Newton - CorrectionDocument6 pagesCapexoc11-Deuxième Loi de Newton - Correctioncqfd242Pas encore d'évaluation
- TD2 Cinematique API1Document3 pagesTD2 Cinematique API1Marwane FakirPas encore d'évaluation
- PSI - ReductDocument2 pagesPSI - Reductbenabbes majdaPas encore d'évaluation
- Cor MatdetDocument13 pagesCor MatdetRodrigue patrice Njounhassi koagnePas encore d'évaluation
- TD Ue MP-CP L1 Ufhb 22-23Document4 pagesTD Ue MP-CP L1 Ufhb 22-23FULGENCE DIBIPas encore d'évaluation
- TD1 Statique GimGmp1 19 20Document2 pagesTD1 Statique GimGmp1 19 20Warren Soulama0% (1)
- 2009 09 Antilles Exo3 Sujet Meca Domino 4ptsDocument3 pages2009 09 Antilles Exo3 Sujet Meca Domino 4ptsMateus Pimenta CardosoPas encore d'évaluation
- Bac 2000 Serie C & e Mathematique GabonDocument3 pagesBac 2000 Serie C & e Mathematique GabonMouhamadou Aliou baPas encore d'évaluation
- DS1 Mécanique 2016-2017Document3 pagesDS1 Mécanique 2016-2017ssèf yøuPas encore d'évaluation
- EMD1 vf-1Document2 pagesEMD1 vf-1ikramzaouche66Pas encore d'évaluation
- TD - 2 - Mécanique Du SolideDocument3 pagesTD - 2 - Mécanique Du SolidehassegoutePas encore d'évaluation
- Série Théorèmes GénérauxDocument3 pagesSérie Théorèmes Générauxsalem nourPas encore d'évaluation
- PhysI TD2 PDFDocument1 pagePhysI TD2 PDFDenilson Josemir100% (1)
- Cinématique Des Solides Formulaire MP PSI TSI RS Sept 2021Document11 pagesCinématique Des Solides Formulaire MP PSI TSI RS Sept 2021Douas MohamedPas encore d'évaluation
- ORAUX2 listeQuestionsCoursDocument4 pagesORAUX2 listeQuestionsCoursTDR APas encore d'évaluation
- Cine Graph EleveDocument8 pagesCine Graph EleveMohammed DahbiPas encore d'évaluation
- Dev - Mecanique de Point - ts1 - 2014-2015Document1 pageDev - Mecanique de Point - ts1 - 2014-2015youssoufsaoud195Pas encore d'évaluation
- Serie 2Document2 pagesSerie 2Mouad Tajouirti (MOUADGAN)Pas encore d'évaluation
- TMF Corrigé TD Tuyère Et AubeDocument6 pagesTMF Corrigé TD Tuyère Et AubeAnonymous 80p9OVPas encore d'évaluation
- Etude Expérimentale en Vue D'un Modèle de Comportement Pour La Vase de TunisDocument12 pagesEtude Expérimentale en Vue D'un Modèle de Comportement Pour La Vase de TunisGeotech NicalPas encore d'évaluation
- Ex 21 1 Boule de Billard Sur Table TournanteDocument5 pagesEx 21 1 Boule de Billard Sur Table TournanteDIBIPas encore d'évaluation
- Pipe SizingDocument4 pagesPipe SizingmarwitosPas encore d'évaluation
- Manuel 300 Tei 2020Document176 pagesManuel 300 Tei 2020pierre lathierePas encore d'évaluation
- Support de Cours DYNAMIQUE CopieDocument14 pagesSupport de Cours DYNAMIQUE CopieDjeti LabantePas encore d'évaluation
- AzziSmail AzziBDocument69 pagesAzziSmail AzziBOubachir Mi DouPas encore d'évaluation
- TP Pendule SimpleDocument6 pagesTP Pendule Simpleben fayssal100% (1)
- Merged 20200624 232813Document118 pagesMerged 20200624 232813Anas LghaziPas encore d'évaluation
- STATIQUE DES FLUIDES ProfDocument12 pagesSTATIQUE DES FLUIDES ProfAbdoulnassirou BassongouPas encore d'évaluation
- 9327 Controle Des Engrenages EnspsDocument8 pages9327 Controle Des Engrenages EnspsKouchad FouadPas encore d'évaluation
- Controle Métaux PDFDocument15 pagesControle Métaux PDFfatimazahra kheraziPas encore d'évaluation
- Présentation Étude PontDocument34 pagesPrésentation Étude PontIlyes TakellaletPas encore d'évaluation
- Chap01C DocOndedechocDocument1 pageChap01C DocOndedechocالغزيزال الحسن EL GHZIZAL HassanePas encore d'évaluation
- Résistance Des Structures - 20230109Document190 pagesRésistance Des Structures - 20230109arcPas encore d'évaluation
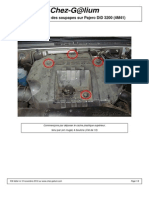
- Réglage Du Jeu Des Soupapes Sur Pajero DiD 3200 (4M41)Document9 pagesRéglage Du Jeu Des Soupapes Sur Pajero DiD 3200 (4M41)Maroselli CharlesPas encore d'évaluation
- IntroductionDocument5 pagesIntroductionBenabed AekPas encore d'évaluation
- LES COURROIES 1 (1) - Lecture SeuleDocument20 pagesLES COURROIES 1 (1) - Lecture SeuleSaid CheikhPas encore d'évaluation
- Statique FrottementDocument33 pagesStatique FrottementŒū Ssa MēPas encore d'évaluation
- CHapitre2 - Travaux Dirigés - Contact de HertzDocument3 pagesCHapitre2 - Travaux Dirigés - Contact de HertzHamza MokhtariPas encore d'évaluation
- Mathieu Le Nel 33359 Kergourlay Le-Nel Pince-Hgw Notice-CalculDocument15 pagesMathieu Le Nel 33359 Kergourlay Le-Nel Pince-Hgw Notice-CalculMouhsineAtbPas encore d'évaluation
- Case Damping Meaning-T00-073Document17 pagesCase Damping Meaning-T00-073mPas encore d'évaluation