Vous aimerez peut-être aussi
- TD 9 Reservoir Pression 20 21Document2 pagesTD 9 Reservoir Pression 20 21NoemPas encore d'évaluation
- Chapitre 1 Les Outils MathématiquesDocument3 pagesChapitre 1 Les Outils MathématiquesbarchouchikhayriPas encore d'évaluation
- Plaques Et Coques - Efforts IntDocument8 pagesPlaques Et Coques - Efforts IntMartinPas encore d'évaluation
- A Savoir InertieDocument3 pagesA Savoir InertieemyazPas encore d'évaluation
- Plaques Circulaires Sous Charge SymétriqueDocument6 pagesPlaques Circulaires Sous Charge SymétriqueMarioPas encore d'évaluation
- Cours PC Chap3NVDocument7 pagesCours PC Chap3NValmerPas encore d'évaluation
- CM AcoustiqueDocument72 pagesCM AcoustiqueRoruPas encore d'évaluation
- Contraintes Dans Le SolDocument33 pagesContraintes Dans Le SolKhaled Jeljeli100% (1)
- Ecoulement Orifice FluideDocument24 pagesEcoulement Orifice FluideWael BadriPas encore d'évaluation
- Calcul Vectoriel Rappels Mathematiques Iut 1ere AnnéeDocument16 pagesCalcul Vectoriel Rappels Mathematiques Iut 1ere AnnéeCamara Cheikh A.B.A.KPas encore d'évaluation
- CM AcoustiqueDocument72 pagesCM AcoustiqueNabila HamlilPas encore d'évaluation
- GeotechniqueII Cours2 2020 2021Document25 pagesGeotechniqueII Cours2 2020 2021Chorouk TabliouaPas encore d'évaluation
- EqDocument19 pagesEqmbou chancellePas encore d'évaluation
- Annexe-Solides en Rotation Autour Dun Axe FixeDocument2 pagesAnnexe-Solides en Rotation Autour Dun Axe FixeYoussef MzabiPas encore d'évaluation
- MMC PartielDocument6 pagesMMC PartielAminChaariPas encore d'évaluation
- Oscillateurs Mécaniques: MecaniqueDocument8 pagesOscillateurs Mécaniques: MecaniqueMorgan merdaPas encore d'évaluation
- Lmeca1901 2021 2022 TP03Document2 pagesLmeca1901 2021 2022 TP03seb navvezPas encore d'évaluation
- ds4 Ipest22 23 CorrigeDocument8 pagesds4 Ipest22 23 CorrigeYoussef MzabiPas encore d'évaluation
- Mecaflu s6 TD ExamensDocument54 pagesMecaflu s6 TD ExamensAymane AymanePas encore d'évaluation
- 45 Elas Cours I3 6 0 Cours ProfDocument62 pages45 Elas Cours I3 6 0 Cours ProfBouchra OmarPas encore d'évaluation
- Element Fini Poutre Grand RotationDocument14 pagesElement Fini Poutre Grand RotationlolotitiloloPas encore d'évaluation
- Matrice D'inertieDocument4 pagesMatrice D'inertieJean AbelaPas encore d'évaluation
- Td3corr PDFDocument7 pagesTd3corr PDFJames KroosPas encore d'évaluation
- 1 Ondes Transversales Sur Une Corde Vibrante: 1.1 Principe de L'étudeDocument7 pages1 Ondes Transversales Sur Une Corde Vibrante: 1.1 Principe de L'étudeChaymae ER-RAMDANYPas encore d'évaluation
- CC2 Mastermecaflu 1819 CorrigéDocument8 pagesCC2 Mastermecaflu 1819 CorrigéFatima Ezzahrae BOUITAPas encore d'évaluation
- 04 I Oscillateur Harmonique Libre A Un Degre de LiberteDocument6 pages04 I Oscillateur Harmonique Libre A Un Degre de LiberteRaphaël SimoninPas encore d'évaluation
- Caractérisations Complexes Isométries-SimilitudesDocument13 pagesCaractérisations Complexes Isométries-SimilitudesYasser DIOUAPas encore d'évaluation
- 10 - Equations Diffã©rentielles Linã©aires D'ordre 1Document6 pages10 - Equations Diffã©rentielles Linã©aires D'ordre 1lamloumiPas encore d'évaluation
- 2-Contraintes RDM ElasticiteDocument21 pages2-Contraintes RDM Elasticiteأسامة مكريمPas encore d'évaluation
- 10.3 - Point Matériel Glissant Sur Une SphèreDocument2 pages10.3 - Point Matériel Glissant Sur Une SphèreWilfried Pacome MenyePas encore d'évaluation
- Cours 1 Systèmes Mécaniques OscillantsDocument6 pagesCours 1 Systèmes Mécaniques OscillantsbidaouimounirPas encore d'évaluation
- Cours CinematiqueDocument19 pagesCours Cinematiqueoussama22Pas encore d'évaluation
- Tenseur D InertieDocument14 pagesTenseur D InertieRondro Ny Aina LuciaPas encore d'évaluation
- Mecaflu CH3Document21 pagesMecaflu CH3api-3735377Pas encore d'évaluation
- C TD M05 Bis SystèmesDocument5 pagesC TD M05 Bis SystèmesHoussam BenkerroumPas encore d'évaluation
- Cours PC 2bac SP International FR 23 2Document5 pagesCours PC 2bac SP International FR 23 2Morgan merda100% (1)
- Pendule de Torsion Cours 1Document2 pagesPendule de Torsion Cours 1Hafsa HafsaPas encore d'évaluation
- Cours3 P&C GCV2 IpsasDocument7 pagesCours3 P&C GCV2 Ipsaskorossaga innocent tourePas encore d'évaluation
- Correction TD TrigonalisationDocument10 pagesCorrection TD TrigonalisationHOUSSEM AMAIDIPas encore d'évaluation
- Vibrations 2Document18 pagesVibrations 2yacinePas encore d'évaluation
- TD 2Document3 pagesTD 2Sop TiamPas encore d'évaluation
- NYA - XXI - Chap 4.5Document8 pagesNYA - XXI - Chap 4.5khayatta45Pas encore d'évaluation
- Cours MMC RDM chapIIIDocument7 pagesCours MMC RDM chapIIIJacques NdavaroPas encore d'évaluation
- Chapitre 3 CinématiqueDocument41 pagesChapitre 3 CinématiqueNowe AhmadePas encore d'évaluation
- Contraintes KAYADocument23 pagesContraintes KAYASamuelPas encore d'évaluation
- Corr EX2 TD3 PDocument2 pagesCorr EX2 TD3 PBamishola Aristide LOKEPas encore d'évaluation
- Cours CFD Parts234Document52 pagesCours CFD Parts234kokakikiPas encore d'évaluation
- Correc TD 1Document6 pagesCorrec TD 1Anas EzzerabiPas encore d'évaluation
- Exmecanique 2008-2009 4 PDFDocument12 pagesExmecanique 2008-2009 4 PDFIl NBPas encore d'évaluation
- Cours MagnetostatiqueDocument32 pagesCours Magnetostatiquelilia Bennaceur FarahPas encore d'évaluation
- COURS Regime SinusoidalDocument22 pagesCOURS Regime SinusoidalFanomezana RakotomalalaPas encore d'évaluation
- Chapitre 3 CinématiqueDocument42 pagesChapitre 3 Cinématiquej.elfirqiPas encore d'évaluation
- TD Corrigé Magnétostatique 34 1Document1 pageTD Corrigé Magnétostatique 34 1nathanPas encore d'évaluation
- Fonctions Usuelles PDFDocument8 pagesFonctions Usuelles PDFfbhkePas encore d'évaluation
- Serie N°1 Complexe 22-23 Math Et SCDocument5 pagesSerie N°1 Complexe 22-23 Math Et SCKoussay ManitaPas encore d'évaluation
- Meftah K. ContraintesDocument34 pagesMeftah K. ContraintesRym KrPas encore d'évaluation
- M Ecanique Quantique II - Corrig e S Erie 8: 1 Transitions AtomiquesDocument8 pagesM Ecanique Quantique II - Corrig e S Erie 8: 1 Transitions AtomiquesB TourePas encore d'évaluation
- Chapitre V - Bon - IMV - 230511 - 161811Document7 pagesChapitre V - Bon - IMV - 230511 - 161811Koutouo FrédyPas encore d'évaluation
- CorrigeDocument1 pageCorrigeNa JouaPas encore d'évaluation
- Exercice 1Document1 pageExercice 1CHERIFPas encore d'évaluation
- TD2 AsservissementDocument3 pagesTD2 AsservissementCHERIFPas encore d'évaluation
- Chapitre 4 - Critères D'écoulementDocument28 pagesChapitre 4 - Critères D'écoulementCHERIFPas encore d'évaluation
- TD2 AsservissementDocument3 pagesTD2 AsservissementCHERIFPas encore d'évaluation
- Chacrone Abderrahmane SMZ8611Document175 pagesChacrone Abderrahmane SMZ8611CHERIFPas encore d'évaluation
- L'endommagement Des Matériaux CompositesDocument26 pagesL'endommagement Des Matériaux CompositesCHERIFPas encore d'évaluation
- Chapitre 3 - Relations Cont-DéformDocument16 pagesChapitre 3 - Relations Cont-DéformCHERIFPas encore d'évaluation
- 1°) Expression Du Besoin: Complétez L'outil Bête À CornesDocument3 pages1°) Expression Du Besoin: Complétez L'outil Bête À CornesCHERIFPas encore d'évaluation
- UntitledDocument4 pagesUntitledCHERIFPas encore d'évaluation
- 1°) Expression Du Besoin: Complétez L'outil Bête À CornesDocument3 pages1°) Expression Du Besoin: Complétez L'outil Bête À CornesCHERIF100% (1)
- Elaboration Des Métaux Ferreurs: I. GénéralitésDocument7 pagesElaboration Des Métaux Ferreurs: I. GénéralitésCHERIFPas encore d'évaluation
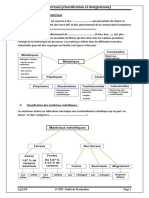
- Les MatériauxDocument4 pagesLes MatériauxCHERIFPas encore d'évaluation
- UntitledDocument7 pagesUntitledCHERIFPas encore d'évaluation
- Economie D'énergie en TrigénérationDocument9 pagesEconomie D'énergie en TrigénérationmarzinusPas encore d'évaluation
- Eva 1 Phy Tle D Ti 2021Document2 pagesEva 1 Phy Tle D Ti 2021Joyce Warren NåňãPas encore d'évaluation
- Formules Statistique UnivarieeDocument2 pagesFormules Statistique UnivarieeAce100% (1)
- Présentation Finale Tassement Et Consolidation MDS2Document37 pagesPrésentation Finale Tassement Et Consolidation MDS2Abdi LhsanPas encore d'évaluation
- polyDTS PDFDocument13 pagespolyDTS PDFlamis ramdane100% (1)
- MGCDocument22 pagesMGCdjamelPas encore d'évaluation
- Devoir 2 Modele 2 Mathematiques 1er Bac Sciences Exp Semestre 1 5Document1 pageDevoir 2 Modele 2 Mathematiques 1er Bac Sciences Exp Semestre 1 5Alae AnouarPas encore d'évaluation
- B Genie CivilDocument9 pagesB Genie CivilRoxanne BouletPas encore d'évaluation
- Treuil Sujet Et CorrigeDocument3 pagesTreuil Sujet Et CorrigeThierry OUAMBO FOTSOPas encore d'évaluation
- Deutsch 951 Series 2008Document32 pagesDeutsch 951 Series 2008lijojose1Pas encore d'évaluation
- Chapitre 4 Analyse Contrainte-DéformationDocument19 pagesChapitre 4 Analyse Contrainte-DéformationRose EvaPas encore d'évaluation
- Fiche Séquence Division CM1 Mai 2010Document5 pagesFiche Séquence Division CM1 Mai 2010katiaguilbeauPas encore d'évaluation
- Referentiel BAC PRO Perruquier PosticheurDocument29 pagesReferentiel BAC PRO Perruquier Posticheurmaria mariaPas encore d'évaluation
- Razi Critique de GalienDocument8 pagesRazi Critique de Galienhayman6Pas encore d'évaluation
- (Statistique Et Probabilites Appliquees) Jean-Jacques Boreux, Éric Parent, Jacques Bernier (Auth.) - Pratique Du Calcul Bayesien-Springer Paris (2010)Document344 pages(Statistique Et Probabilites Appliquees) Jean-Jacques Boreux, Éric Parent, Jacques Bernier (Auth.) - Pratique Du Calcul Bayesien-Springer Paris (2010)Mohammed Said Maamra0% (1)
- FD P 18-326 - Novembre 2004 PDFDocument19 pagesFD P 18-326 - Novembre 2004 PDFMohammed BoudchichePas encore d'évaluation
- Accouplement TemporaireDocument7 pagesAccouplement TemporaireBÏĞ RÀMÏ100% (1)
- L ' Essai de TractionDocument9 pagesL ' Essai de TractionTahar ADJOUDJPas encore d'évaluation
- P 19 Thermo 3 Thermodynamique IndustrielleDocument32 pagesP 19 Thermo 3 Thermodynamique IndustrielleDriss ZiedPas encore d'évaluation
- Regulation CompresseurDocument8 pagesRegulation CompresseurPatrick LorealPas encore d'évaluation
- Vers Une Progression Annuelle en Espagnol Collc3a8ge Palier 1Document15 pagesVers Une Progression Annuelle en Espagnol Collc3a8ge Palier 1Sylvie Kabir IdrissiPas encore d'évaluation
- Mémoire de Fin D'études: #Ordre.......... /F.S.S.A/UAMOB/2019Document60 pagesMémoire de Fin D'études: #Ordre.......... /F.S.S.A/UAMOB/2019Lanag LanagPas encore d'évaluation
- Exercice Corrigé - Méthode Des Forces 1Document8 pagesExercice Corrigé - Méthode Des Forces 1Kamel Oumrich50% (2)
- Bac 2019 SPC ST2SDocument4 pagesBac 2019 SPC ST2SAnonymous gTF3XOgPas encore d'évaluation
- 88 TD CinetiqueDocument2 pages88 TD CinetiqueACHRAF EL MESSAOUDIPas encore d'évaluation
- Fonction ContinueDocument19 pagesFonction ContinueadnanePas encore d'évaluation
- Kemija: Izpitna Pola 1Document16 pagesKemija: Izpitna Pola 1anejPas encore d'évaluation
- Corrigé de La Série (3 Problèmes)Document14 pagesCorrigé de La Série (3 Problèmes)Amìnę RajębPas encore d'évaluation
- La Geometrie Non Commutative PDFDocument2 pagesLa Geometrie Non Commutative PDFkheira314Pas encore d'évaluation
- Lti PDFDocument289 pagesLti PDFSamir SaidPas encore d'évaluation
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieD'EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieÉvaluation : 5 sur 5 étoiles5/5 (2)
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- 160 ressources pour se lancer dans la vidéo quand on n’y connait rienD'Everand160 ressources pour se lancer dans la vidéo quand on n’y connait rienPas encore d'évaluation
- Approvisionnement et traitement de l’eau: Les Grands Articles d'UniversalisD'EverandApprovisionnement et traitement de l’eau: Les Grands Articles d'UniversalisPas encore d'évaluation
- Anatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursD'EverandAnatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursPas encore d'évaluation
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- La vie des abeilles: Prix Nobel de littératureD'EverandLa vie des abeilles: Prix Nobel de littératureÉvaluation : 4 sur 5 étoiles4/5 (41)
- Transformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitD'EverandTransformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitÉvaluation : 4 sur 5 étoiles4/5 (14)
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Harmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020D'EverandHarmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Cahier de jeux de stimulation cognitive: Sujets Alzheimer, désorientés, démences, amnésiesD'EverandCahier de jeux de stimulation cognitive: Sujets Alzheimer, désorientés, démences, amnésiesPas encore d'évaluation
- Cancer - Leucémie: Et autres maladies apparemment incurables, mais guérissables avec des moyens naturelsD'EverandCancer - Leucémie: Et autres maladies apparemment incurables, mais guérissables avec des moyens naturelsPas encore d'évaluation
- Enseigner une Langue Etrangère Par l’Apprentissage HybrideD'EverandEnseigner une Langue Etrangère Par l’Apprentissage HybridePas encore d'évaluation
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Conception & Modélisation CAO: Le guide ultime du débutantD'EverandConception & Modélisation CAO: Le guide ultime du débutantPas encore d'évaluation
- Le B.A.-Ba de la communication: Comment convaincre, informer, séduire ?D'EverandLe B.A.-Ba de la communication: Comment convaincre, informer, séduire ?Évaluation : 3 sur 5 étoiles3/5 (1)
- Puissance naturelles - Que faire si votre "meilleure partie" est en grève?: Puissance naturelles-améliorer les recours pour augmenter la virilité de la capacité à obtenir une érection de fermetéD'EverandPuissance naturelles - Que faire si votre "meilleure partie" est en grève?: Puissance naturelles-améliorer les recours pour augmenter la virilité de la capacité à obtenir une érection de fermetéÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Semer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumeD'EverandSemer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumePas encore d'évaluation
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaD'EverandL'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaÉvaluation : 3 sur 5 étoiles3/5 (1)