Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- ElevDocument15 pagesElevNejib JallouliPas encore d'évaluation
- Moteur Asynchrone TriphaseDocument18 pagesMoteur Asynchrone TriphaseGana83% (6)
- La Machine Synchrone-Michel LebeauDocument17 pagesLa Machine Synchrone-Michel LebeauAirton Flores0% (1)
- Cours Des Moteurs AsynchronesDocument40 pagesCours Des Moteurs AsynchronesBALLOUK Soufiane100% (5)
- ProfDocument15 pagesProfNejib JallouliPas encore d'évaluation
- Cours Machines AsynchronesDocument53 pagesCours Machines Asynchronesminoungou constantPas encore d'évaluation
- Cours - Machines - Asynchrones MODELISATIONDocument53 pagesCours - Machines - Asynchrones MODELISATIONtamsirniangPas encore d'évaluation
- Moteurs Asynchrones TriphasésDocument34 pagesMoteurs Asynchrones TriphasésMajda SerbatPas encore d'évaluation
- Electrotec MachinesAlternatifDocument15 pagesElectrotec MachinesAlternatifMa HdiPas encore d'évaluation
- B3-Moteur Asynchrone Triphasé-2020-ÉlèveDocument12 pagesB3-Moteur Asynchrone Triphasé-2020-ÉlèveArfaoui AymenPas encore d'évaluation
- Electrotechnique1 Chap05 MASDocument5 pagesElectrotechnique1 Chap05 MASBadr BouajajPas encore d'évaluation
- tp4MOTEURS ASYNCHRONES TRIPHASESDocument13 pagestp4MOTEURS ASYNCHRONES TRIPHASESsalahouchenesalahPas encore d'évaluation
- Cours Machine AsynchroneDocument28 pagesCours Machine AsynchroneMeryem El MennaouyPas encore d'évaluation
- Machine AsynchroneDocument16 pagesMachine AsynchroneEr-Rhahmani MedPas encore d'évaluation
- 1CPI Cours MASDocument8 pages1CPI Cours MASANDAHMOUPas encore d'évaluation
- 14 Les Machines SynchronesDocument13 pages14 Les Machines Synchronesmolodme380Pas encore d'évaluation
- Chap 5 PDFDocument14 pagesChap 5 PDFMohamed AmineeoxPas encore d'évaluation
- Chapitre.3.actionneursDocument11 pagesChapitre.3.actionneursFaten Bayou0% (1)
- Cours Mas Fa2026Document7 pagesCours Mas Fa2026Dile Stephen SAMBA SAMBAPas encore d'évaluation
- Cours4-Moteur AsynchroneDocument10 pagesCours4-Moteur AsynchroneFakhri Ghrairi100% (1)
- Variation de Vitesse Des Moteurs ÉlectriquesDocument44 pagesVariation de Vitesse Des Moteurs ÉlectriquesmaronnamPas encore d'évaluation
- TP08 Annexe PDFDocument3 pagesTP08 Annexe PDFKhaled OuniPas encore d'évaluation
- 02 Moteur AsynchroneDocument11 pages02 Moteur AsynchroneLebel NkogoPas encore d'évaluation
- Asg 3 Moteurs Et ChargesDocument28 pagesAsg 3 Moteurs Et ChargesOussama SaeighPas encore d'évaluation
- Vitesse de SynchronismeDocument23 pagesVitesse de Synchronismei kPas encore d'évaluation
- B3-Moteur Asynchrone Triphasé-2021-ÉlèveDocument13 pagesB3-Moteur Asynchrone Triphasé-2021-ÉlèveKadri MongiPas encore d'évaluation
- Cours de Machines Electrique ELEQ 4 PDFDocument52 pagesCours de Machines Electrique ELEQ 4 PDFCyrille Heubia100% (5)
- Chapitre 2-1Document10 pagesChapitre 2-1Oussama JaafariPas encore d'évaluation
- Machine Asynchrone TolotraDocument11 pagesMachine Asynchrone TolotraManoaPas encore d'évaluation
- Chapitre 2 M1 MEADocument32 pagesChapitre 2 M1 MEAMOUH MIDOPas encore d'évaluation
- cours-MASDocument12 pagescours-MASfouadPas encore d'évaluation
- Moteur AsynchroneDocument12 pagesMoteur Asynchroneasmaahmedhassan12Pas encore d'évaluation
- MasDocument16 pagesMasSôûLãymãne BénPas encore d'évaluation
- Cours - Electricite - Moteur Asynchrone - Terminale StiDocument11 pagesCours - Electricite - Moteur Asynchrone - Terminale StiAissam EssanhajiPas encore d'évaluation
- Machines SynchronesDocument39 pagesMachines SynchronesSamroura Yessad100% (1)
- Chapitre 5 Les Moteurs Asynchrones TriphasesDocument5 pagesChapitre 5 Les Moteurs Asynchrones Triphasesعبد الله إبن عباس100% (1)
- Fonction Convertir Moteurs Asynchrones 2 Bac Science Dingenieur PDFDocument8 pagesFonction Convertir Moteurs Asynchrones 2 Bac Science Dingenieur PDFAmscool SavadogoPas encore d'évaluation
- 03 Machine Asynchrone ÉlèveDocument16 pages03 Machine Asynchrone ÉlèveGhaith Smida100% (1)
- Convertir Machine AsynchroneDocument5 pagesConvertir Machine AsynchroneBALLOUK SoufianePas encore d'évaluation
- 3 Cours Machines AsynchronesDocument5 pages3 Cours Machines AsynchronesanesPas encore d'évaluation
- 5Document18 pages5Reda SebaaPas encore d'évaluation
- Installation Et Entretien Des Machine A Courant AlternatifDocument33 pagesInstallation Et Entretien Des Machine A Courant AlternatifMaGMaaa WKPas encore d'évaluation
- Machine AsynchroneDocument7 pagesMachine AsynchroneFatma Borgi Ep SaadaouiPas encore d'évaluation
- Le Moteur Asynchrone TriphaseDocument8 pagesLe Moteur Asynchrone TriphaseaminePas encore d'évaluation
- Résumé Moteur Asynchrone Avec ExercicesDocument5 pagesRésumé Moteur Asynchrone Avec ExercicesjamesPas encore d'évaluation
- Modélisation de La Génératrice AsynchroneDocument33 pagesModélisation de La Génératrice AsynchroneLaila JamilPas encore d'évaluation
- Cours Machine Synchrone TgettDocument22 pagesCours Machine Synchrone TgettJosef PrincePas encore d'évaluation
- Moteurs AsynchroneDocument57 pagesMoteurs AsynchroneAbdelmajid AbouloifaPas encore d'évaluation
- Moteur AsynchroneDocument64 pagesMoteur AsynchroneSaidiJalel100% (2)
- Principe de Fonctionnement Des Machines À Courant AlternatifDocument12 pagesPrincipe de Fonctionnement Des Machines À Courant AlternatifYahiyaoui Sofyane100% (3)
- 09 Moteurs Asynchrones TriphasesDocument10 pages09 Moteurs Asynchrones TriphasesAmeni BahriPas encore d'évaluation
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Dossier Technique Sess Principale2010Document6 pagesDossier Technique Sess Principale2010Nejib JallouliPas encore d'évaluation
- Doss Tech Dess Ensemble Principal2013 A3Document1 pageDoss Tech Dess Ensemble Principal2013 A3Nejib JallouliPas encore d'évaluation
- DC1 3st DT 2014Document3 pagesDC1 3st DT 2014Nejib JallouliPas encore d'évaluation
- Nom Et PrénomDocument4 pagesNom Et PrénomNejib JallouliPas encore d'évaluation
- Formation MikropascalDocument69 pagesFormation MikropascalNejib JallouliPas encore d'évaluation
- TP-B11 FinDocument9 pagesTP-B11 FinNejib JallouliPas encore d'évaluation
- Circuit ÉlecDocument82 pagesCircuit ÉlecNejib JallouliPas encore d'évaluation
- DC1 3st DR 2014Document5 pagesDC1 3st DR 2014Nejib JallouliPas encore d'évaluation
- ElevDocument12 pagesElevNejib JallouliPas encore d'évaluation
- D-T Cadreuse 2018Document2 pagesD-T Cadreuse 2018Nejib JallouliPas encore d'évaluation
- DC1 DT 4ST 2016 2017Document4 pagesDC1 DT 4ST 2016 2017Nejib JallouliPas encore d'évaluation
- TP-A42 FinDocument24 pagesTP-A42 FinNejib JallouliPas encore d'évaluation
- ds1 3st 2012Document5 pagesds1 3st 2012Nejib JallouliPas encore d'évaluation
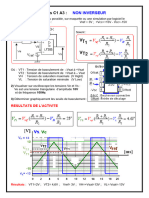
- CHAPITRE C1 Act C1 A3corrigéDocument2 pagesCHAPITRE C1 Act C1 A3corrigéNejib JallouliPas encore d'évaluation
- RappelDocument6 pagesRappelNejib JallouliPas encore d'évaluation
- FICHE DE PREPARATION Et de DéroulementDocument3 pagesFICHE DE PREPARATION Et de DéroulementNejib JallouliPas encore d'évaluation
- Système TriphaséDocument11 pagesSystème TriphaséNejib JallouliPas encore d'évaluation
- Exercice D'évaluationDocument5 pagesExercice D'évaluationNejib JallouliPas encore d'évaluation
- Les Automates ProgrammablesDocument64 pagesLes Automates ProgrammablesNejib JallouliPas encore d'évaluation
- Fiche de Pre Et de DerDocument3 pagesFiche de Pre Et de DerNejib JallouliPas encore d'évaluation
- Sujet 63Document2 pagesSujet 63Nejib JallouliPas encore d'évaluation
- Moteur A Courant ContinuDocument79 pagesMoteur A Courant ContinuNejib JallouliPas encore d'évaluation
- Sujet 74Document2 pagesSujet 74Nejib JallouliPas encore d'évaluation
- Sujet 34Document3 pagesSujet 34Nejib JallouliPas encore d'évaluation
- Sujet 33Document2 pagesSujet 33Nejib JallouliPas encore d'évaluation
- Sujet 24Document2 pagesSujet 24Nejib JallouliPas encore d'évaluation
- Sujet 83Document2 pagesSujet 83Nejib JallouliPas encore d'évaluation
- Sujet 13Document3 pagesSujet 13Nejib JallouliPas encore d'évaluation
- Memoire JjelDocument52 pagesMemoire Jjelammar benmehenniPas encore d'évaluation
- L'assainissement Et L'hygiène en Afrique de L'ouest Et Du CentreDocument13 pagesL'assainissement Et L'hygiène en Afrique de L'ouest Et Du CentremenkantiskantePas encore d'évaluation
- Catalogue2020 Nuancier FR BDDocument1 pageCatalogue2020 Nuancier FR BDphilPas encore d'évaluation
- Devoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Document4 pagesDevoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Youssef CherniPas encore d'évaluation
- Convention D'investissementDocument3 pagesConvention D'investissementGracia Sedi100% (1)
- CHQ Client Atig Soft 2022Document1 pageCHQ Client Atig Soft 2022Abdellatif BEN ALIPas encore d'évaluation
- Huawei Ict Competition - Exam GuideDocument4 pagesHuawei Ict Competition - Exam GuideHamadoun Aly TraoréPas encore d'évaluation
- Fondations Superficielles D PDFDocument2 pagesFondations Superficielles D PDFkzi itaPas encore d'évaluation
- CV Ablo - FRDocument4 pagesCV Ablo - FRAnonymous 6kYgLCPas encore d'évaluation
- Agenda 3 Guide PedagogiqueDocument328 pagesAgenda 3 Guide PedagogiqueAnthony Lo71% (7)
- Les Indicateurs ElectrochimiquesDocument23 pagesLes Indicateurs ElectrochimiquesJosue Ivan Quisbert BalboaPas encore d'évaluation
- Vulfpeck - Disco Ulysses - WongDocument5 pagesVulfpeck - Disco Ulysses - WongvanchoitPas encore d'évaluation
- Les Figures de Style Flashcards QuizletDocument9 pagesLes Figures de Style Flashcards Quizletmohammed abdouPas encore d'évaluation
- Georges Didi Huberman Devant Le Temps Histoire de L Art Et Anachronisme Des ImagesDocument3 pagesGeorges Didi Huberman Devant Le Temps Histoire de L Art Et Anachronisme Des ImagesjaviercanoramosPas encore d'évaluation
- MaindocumentDocument14 pagesMaindocumentBENYAHIA NESRINEPas encore d'évaluation
- Comprehension EcriteDocument11 pagesComprehension EcriteVillamizar Liseth0% (1)
- 1 Et2 Années: MathsDocument35 pages1 Et2 Années: MathsHedi cherif100% (1)
- Lettre de MotivationDocument1 pageLettre de MotivationFlorianJeunessePas encore d'évaluation
- PCD MokoloDocument267 pagesPCD MokoloArnold NDIPATCHOUPas encore d'évaluation
- Le Merchandising 1Document15 pagesLe Merchandising 1raex_innoPas encore d'évaluation
- PROST - BIO Citė de L'architectureDocument3 pagesPROST - BIO Citė de L'architectureAhmed NabilPas encore d'évaluation
- Comptabilisation Des ImmobilisationsDocument10 pagesComptabilisation Des ImmobilisationsmedhidaPas encore d'évaluation
- (Lớp 11) Bắc Giang 2013-2014 (Có đáp án)Document28 pages(Lớp 11) Bắc Giang 2013-2014 (Có đáp án)ne saisPas encore d'évaluation
- ADD-00058819-FR 160105 Six Sigma Learning GuideDocument65 pagesADD-00058819-FR 160105 Six Sigma Learning GuideRemPas encore d'évaluation
- CSS Maintenables Avec Sass-Compass Outils Et Bonnes Pratiques Pour L'intégrateur Web (Deloumeau-Prigent, Kaelig Heilmann, Christian)Document268 pagesCSS Maintenables Avec Sass-Compass Outils Et Bonnes Pratiques Pour L'intégrateur Web (Deloumeau-Prigent, Kaelig Heilmann, Christian)EvoxPas encore d'évaluation
- Cours Modulation AnalogiqueDocument18 pagesCours Modulation Analogiquechahro555100% (14)
- Contrat de Vente Dune CoupeDocument1 pageContrat de Vente Dune CoupeAloe VeraPas encore d'évaluation
- Manuel Propriétaire Xmax Phase IDocument92 pagesManuel Propriétaire Xmax Phase IBeauchat WhistlePas encore d'évaluation
- Gestion Du CorpusDocument8 pagesGestion Du CorpusRoxana RoxannePas encore d'évaluation
- Az V Analyse Financiere-1Document16 pagesAz V Analyse Financiere-1Mame Cheikh SeckPas encore d'évaluation