Académique Documents
Professionnel Documents
Culture Documents
Reducteur
Reducteur
Transféré par
Sonea RazvanCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Reducteur
Reducteur
Transféré par
Sonea RazvanDroits d'auteur :
Formats disponibles
Mthodologie de calcul et de
conception dun REDUCTEUR
dengrenage cylindrique ou conique
GINA STOICA ( Universit POLITEHNICA de Bucarest )
BERNARD LEDUC (Universit Libre de Bruxelles )
2009
A mon professeur,
Cet aide mmoire est le fruit dune collaboration que jai ralise avec le
professeur Bernard LEDUC de lUniversit LIBRE de Bruxelles et qui sest droul
pendant plusieurs mois. Le livre sur lequel sest appuy notre travail a le titre
Transmisii mecanice cu reductoare intr-o treapta dont les auteurs sont Mihai MUSAT
et Gina STOICA et qui a connu des adaptations et modifications successives depuis 1998,
lanne de sa publication.
Le public immdiat auquel sadresse cet aide mmoire est constitu par les
tudiants de lUniversit LIBRE de Bruxelles et ceux de lUniversit POLITEHNICA
de Bucarest, spcialiss en Gnie Mcanique.
Tout d'abord, je tiens remercier mon ancien collgue, M. Mihai MUSAT, qui a
reprsent pour moi un modle de professeur et qui m'a donn l'opportunit de dcouvrir
le domaine des lments des machines. Cest toujours grce lui que jai russi
dcouvrir les mthodes pdagogiques et la passion pour ce mtier important celui de
professeur ! Merci, Professeur, d'avoir pris le temps de rpondre mes nombreuses
questions.
J e suis galement reconnaissante M. Mihai MUSAT de s'tre toujours souci de
ma comprhension quant aux problmes abords. Un grand merci encore M. Mihai
MUSAT pour sa gentillesse, sa disponibilit, son professionnalisme, son soutien pendant
toutes les annes de collaboration.
J e ddie ce travail M. Mihai MUSAT.
Gina Florica STOICA
Introduction .................................................................................................................
SCHEMAS CINEMATIQUES DES TRANSMISSIONS MECANIQUES ...........
1. Calcul cinematique et energetique .........................................................................
1.1. Choix du moteur electrique ........................................................................
1.2. Calcul cinematique .....................................................................................
1.2.1 Determination des rapports de transmission ................................
1.2.2. Calcul de la vitesse de rotation des arbres ..................................
1.3. Calcul energetique ......................................................................................
1.3.1. Calcul des puissances transmises par les arbres ..........................
1.3.2. Calcul des moments de torsion transmis par les arbres .............
2. Dimensionnement preliminaire des arbres ...........................................................
3. Calcul de la transmission par courroies trapezoidales .......................................
4. Dimensionnement preliminaire des engrenages ..................................................
4.1. Choix des materiaux pour les roues dentes et des traitements
thermiques ou thermochimiques ..............................................................
4.2. Dimensionnement preliminaire des engrenages .........................................
4.2.1. Dimensionnement preliminaire dun engrenage cylindrique
exterieur a denture hlicodale ..................................................
4.2.2. Pre-dimensionnement dun engrenage conique a denture droite
5. Elements geometriques des roues dentes ............................................................
5.1. Elements geometriques des roues cylindriques a denture helicodale .
5.2. Elements geometriques des roues dentees coniques a denture droite pour
un engrenage orthogonal ( ) ............................................................
o
90 =
6. Calcul des forces dans les engrenages ...................................................................
6.1. Forces dans un engrenage cylindrique helicoidal ......................................
6.2. Forces dans un engrenage conique a denture droite ...................................
7. Verifications des engrenages ..................................................................................
7.1. Verification des conditions de taillage et dengrenement ..........................
7.1.1. Verification du sous-taillage des dents .......................................
7.1.2. Verification de la continuite de lengrenement ...........................
7.1.3. Verification des interferences des dents ......................................
7.1.4. Verification du jeu a la tete des dents .........................................
7.1.5. Verification de lpaisseur des dents sur le cercle de tte ...........
7.2 Verification de la resistance de la denture des roues dentes .....................
7.2.1. Verification de la sollicitation au pied de la dent ........................
7.2.1.1. Cas des engrenages cylindriques denture Helicoidale .
7.2.1.2. Cas des engrenages coniques a denture droite .............
7.2.2.Verification de la resistance a la pression superficielle
(verification au pitting) ................................................................
7.2.2.1. Cas des engrenages cylindriques denture helicoidale
7.2.2.2. Cas des engrenages coniques a denture droite .............
8. Dimensionement des arbres ...................................................................................
9. Choix et verification des clavettes ..........................................................................
10. Calcul des reactions. Trace des diagrammes des moments flechissants et des
moments de torsion ...............................................................................................
11. Choix et verification des roulements ...................................................................
12. Choix et verification des accouplements .............................................................
12.1. Accouplement elastique a boulons ...........................................................
12.2. Accouplements a flasques ........................................................................
13. Verification des arbres .........................................................................................
14. Choix du lubrifiant et du systeme de graissage des engrenages .......................
15. Elements energetiques des reducteurs a roues dentees .....................................
15.1. Calcul du rendement total du reducteur ...................................................
15.2. Calcul de la temperature de fonctionnement du reducteur .......................
16. Elements constitutifs des reducteurs de tours a roues dentees cylindriques et
coniques ...............................................................................................................
16.1. Construction des roues dentees cylindriques et coniques ........................
16.2. Construction des carters ...........................................................................
Bibliographie ...............................................................................................................
INTRODUCTION
La formation de lingnieur mcanicien requiert la ralisation de projets mettant en
oeuvre des organes de machine. Un tel projet comporte une phase de calcul et de
dimensionnement suivi dune phase de conception et de dessin.
Tout projet mcanique doit imprativement respecter des normes de secteur et
valoriser les expriences antrieures. On se propose de raliser un projet de transmission
mcanique dutilisation gnrale. Cette transmission est compose dun rducteur roues
dentes cylindriques ou coniques, dune transmission par courroies trapzodales et dun
accouplement.
Ce projet sera loccasion pour ltudiant dillustrer par ce cas pratique une
mthodologie de conception base sur le calcul des organes des machines et de la
normalisation. Ltudiant doit suivre les tapes successives du projet en se rferant chaque
fois que ncessaire aux annexes.
SCHEMAS CINEMATIQUES DES TRANSMISSIONS MECANIQUES
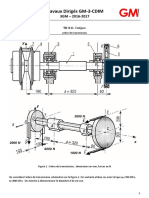
Le schma de principe dune transmission mcanique rducteur est indiqu sur la figure1.
Fig. 1. Schma de principe dune transmission mcanique
(ME - moteur lectrique; TCT - transmission par des courroies trapzodales; RT - rducteur de
vitesse roues dentes; C accouplement, MR- machine rceptrice)
En partant de ce schma simple, on peut obtenir beaucoup de variantes qui diffrent
par le positionnement dans lespace des lments de la transmission, par le type des roues
dentes (cylindriques, coniques) et leur disposition lintrieur du rducteur de vitesse, par
le nombre dtages de rduction dans le rducteur, par le type de couplage utilis
(accouplement lastique boulons, accouplement rigide) etc.
1
B
D
A
C
1
2
I
II
a)
C
D
A
B
1
I I
2
I
b)
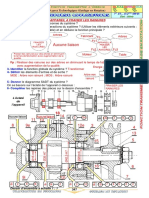
Fig. 2. Schmas cinmatiques des rducteurs de vitesse utilisant des roues
dentes cylindriques ou coniques.
a) Rducteur roues dentes cylindriques denture hlicodale
b) Rducteur roues dentes coniques denture droite
Dans ces schmas, les arbres sont nots I et II (de lentre vers la sortie), les roues dentes
sont notes 1 et 2, les paliers sont respectivement A et B pour larbre I dentre, C et D
pour larbre II de sortie.
Les donnes initiales (grandeurs dentre) pour le calcul de la transmission
mcanique sont: la vitesse de rotation de larbre de sortie du rducteur (entre dans la
machine rceptrice) n
II
(en tr/min) ,la puissance de cet arbre P
II
(en kW) et la vitesse de
rotation vide du moteur lectrique dentranement (en tr/min). Parfois on impose
galement le rapport de rduction de la transmission par courroies i
TCT
, ou lintervalle de
fonctionnement entre deux changements des roulements L
h
(en heures).
2
1. CALCUL CINEMATIQUE ET ENERGETIQUE
1.1. CHOIX DU MOTEUR ELECTRIQUE
A partir des donnes initiales, on dtermine la puissance et la vitesse de rotation du
moteur dentranement. Les donnes gomtriques rsulteront des valeurs standardises
trouves dans les catalogues des fabricants de moteurs lectriques.
La puissance ncessaire au moteur, P
M,
sobtient en considrant la puissance la
sortie du rducteur, P
II
et les pertes nergtiques des lments composants la transmission,
exprimes par leurs rendements:
12
2
a r TCT
II
tot
II
M
P P
P
= =
(1.1)
O:
tot
- est le rendement total de la transmission mcanique;
TCT
- est le rendement de la transmission par des courroies trapzodales;
r
- est le rendement dune paire de roulements
12
a
- est le rendement de lengrenage
Dans le tableau 1.1 on indique des ordres de grandeur des rendements de quelques couples
de frottement prsents dans une transmission mcanique.
Tableau 1.1 : Rendements de quelques couples de frottement
Couples de frottement Rendement
Engrenage cylindrique 0,97 .. 0,99
Transmission par courroies
trapzodales
0,94 .. 0,97
Paire de roulements 0,99 . 0,995
Pour tre du ct de la scurit, il faut calculer la puissance ncessaire au moteur
dentranement en utilisant les valeurs infrieures des intervalles mentionns pour chacun
des rendements. Connaissant la vitesse de rotation de marche vide du moteur lectrique,
on choisit dans le catalogue des fabricants le moteur adquat.
Lannexe 1 prsente les principales caractristiques fonctionnelles et dimensionnelles de
quelques moteurs asynchrones.
La puissance qui sera utilise dans les calculs ultrieurs, P
M
sera celle dtermine
conformment la relation (1.1), et la vitesse de rotation sera une des valeurs de marche en
charge, n
M
prise des tableaux de lannexe 1.
3
1.2. CALCUL CINEMATIQUE
1.2.1. Determination des rapports de transmission
Le rapport de transmission total de la transmission mcanique est:
II M tot
n n i / = (1.2)
On peut crire:
(1.3)
2 1
= i i i
TCT tot
Cest dire (1.4)
TCT tot
i i i /
2 1
=
O est le rapport de transmission du rducteur de vitesse
2 1
i
Pour un engrenage cylindrique, le rapport de transmission recommand se situe entre
2,5 et 6,3 (max. 10). Les valeurs nominales des rapports de transmission sont standardises
(v. le tableau 1.2)
2 1
i
Tableau 1.2 : Rapports de transmission nominaux
I II I II I II
1,00 1,00 2,00 2,00 4,00 4,00
1,12 2,24 4,50
1,25 1,25 2,50 2,50 5,00 5,00
1,40 2,80 5,60
1,60 1,60 3,15 3,15 6,30 6,30
1,80 3,55 7,10
I - Valeurs recommands
II - Valeurs Admises
1.2.2. Calcul de la vitesse de rotation des arbres
En connaissant la vitesse de rotation en charge du moteur,
M
n et les rapports de la
transmission par courroies et de lengrenage , on peut calculer la vitesse de
rotation des arbres:
TCT
i
12
i
RT I II TCT M I
i n n i n n / ; / = = (1.5)
La valeur calcule de la vitesse de rotation de larbre de sortie du rducteur , est
diffrente de celle donne dans lnonc du projet. Dans une tape ultrieure du calcul
(choix final des nombres des dents pour les quatre roues dentes) on va imposer la
condition que le rapport de transmission effectif du rducteur ne diffre pas de celui donn
initialement par la relation (1.4), de plus de 3 %.
II
n
4
1.3. CALCUL ENERGETIQUE
1.3.1. Calcul des puissances transmises par les arbres
En partant de la puissance de sortie du rducteur (donne initialement), on
calcule les puissances reues par chacun des arbres de la transmission:
II
P
- la puissance reue par larbre I:
12
a r
II
I
P
P
= (1.6)
- la puissance reue par larbre du moteur:
2
12
r a TCT
II
TCT
I
M
P P
P
= = (cf.1.1)
1.3.2. Calcul des moments de torsion transmis par les arbres
Si la puissance est introduite en kW et la vitesse de rotation en tr/min, le moment
de torsion des arbres I et II est donn par la relation :
II I
II I
II I t
n
P
M
,
, , 4
,
10 955 = [N mm] (1.7)
2. DIMENSIONNEMENT PRELIMINAIRE DES ARBRES
Les arbres du rducteur sont sollicits en torsion et en flexion. Dans cette phase du
projet, la flexion ne peut pas tre prise en compte, parce quon ne connat ni les forces qui
chargent les arbres, ni les distances entre les appuis, ni la localisation des forces entre les
appuis.
Donc, pour obtenir des valeurs indicatives des diamtres des arbres, on va faire leur
dimensionnement prliminaire en torsion et pour tenir compte de lexistence de la flexion,
on va travailler avec des valeurs admissibles
at
rduites (usuellement
at
=1012 N/mm
2
pour les arbres I et II).
La relation de dimensionnement prliminaire est:
3
16
at
t
M
d
= (2.1)
Sur base des diamtres obtenus ( v. 2.1) les normes relatives aux dimensions des
bouts darbres ( annexe 2) permet de fixer les diamtres nominaux et les longueurs.
5
Pour le bout de larbre II sur lequel on fait le montage de laccouplement, il faut
galement consulter les donnes relatives soit laccouplement lastique goupilles
(Annexe 3) soit laccouplement rigide (Annexe 4) pour assurer la compatibilit.
3. CALCUL DE LA TRANSMISSION PAR COURROIES
TRAPEZOIDALES
Le calcul de la transmission par courroies trapzodales arbres parallles est
standardis. Les grandeurs dentre sont: la puissance larbre du moteur
dentranement (kW), la vitesse de rotation (tr/min), le rapport de la
transmission par courroies .
M c
P P =
M
n
TCT
i
Les tapes du calcul sont:
a Le choix du type de la courroie est fait sur base du nomogramme de la figure
3.1 pour les courroies trapzodales troites, en fonction de la puissance larbre
moteur
M
P et de la vitesse de rotation .
M
n
Pour les profils de courroies situes sur les nomogrammes la proximit des limites entre
les domaines, on recommande de choisir le type de courroie se trouvant sous la ligne
oblique. Dans le tableau 3.1 on a indiqu les lments gomtriques des sections des
courroies et leurs longueurs ltat libre.
Fig. 3.1. Nomogramme pour le choix des courroies trapzodales troites
6
2
1
F
0
F
o
A
/2
Fig. 3.2. Forces dans les courroies trapzodales troites
b Le choix du diamtre de la poulie la plus petite est fait en fonction du
type de courroie, en respectant les indications des normes. Le tableau 3.2 prsente un
extrait de cette norme.
1
p
D
c Le calcul du diamtre de la poulie la plus grande est fait avec la relation:
1 2
p TCT p
D i D = (3.1)
Sil ny a pas de restrictions, on augmente les diamtres la valeur la plus proche du
tableau 3.2 .
d On choisit prliminairement la distance entre les axes A:
) ( 2 ) ( 7 , 0
2 1 2 1
p p p p
D D A D D + + (3.2)
e Langle entre les branches de la courroie:
A
D D
p p
2
arcsin 2
1 2
= (3.3)
f Langle denroulement sur la poulie la plus petite :
et sur la poulie la plus grande =
o
180
1
+ =
o
180
2
g La longueur de la courroie a ltat libre:
A
D D D D
A D D A L
p p p p
p p p
4
) (
2
) (
2 ) (
360 2
cos 2
2
2 1
1 2 2 1
2 1
+
+
+ + + =
(3.4)
La longueur ltat libre de la courroie est augmente jusqu la valeur
standardise la plus proche (tableau 3.1).
Avec la valeur normalise choisie pour , on recalcule A en utilisant la relation
(3.4) et
p
L
2 1
, , .
h La vitesse priphrique de la courroie:
60000
1 M
n Dp
v
=
(m/s) (3.5)
7
Tableau 3.1 : Courroies trapzodales. Dimensions et longueurs initiales
Longueurs initiales
L
p
mm
Type
Courr
oie
Dimensions
Caractristiq
ues
de la section
l
p
xh
a
mm
h h
mm
D
max
mm
degrs
Minimu
m
Maximu
m
D
p min
mm
Section
de la
courroie
A
c
cm
2
SPZ 8,5x8,0 - 80,4 2,0 630 3550 71 0,54
SPA 11,0x10 - 100,5 2,8 800 4500 100 0,90
SPB 14,0x13 - 130,5 3,5 1250 8000 160 1,50
16x15 16,0x15 - 150,5 4,0 1600 10000 200 1,98
SPC 19,0x18 - 180,6 4,8
400,1
2000 12500 224 2,78
400 500 630 800 1000 1250 1600 2000 Preferes
2500 3150 4000 5000 6200 8000 10000 12500
450 560 710 900 1120 1400 1800 2240
Longueurs
initiales
L
p
, mm
A viter
2800 3550 4500 5600 7100 9000 11200 -
Exemples de notation: SPA 2000; (courroie trapzodale troite type SPA, ayant la
longueur initiale L
p
=2000 mm).
Tableau 3.2 : Srie des diamtres des poulies (mm).
p
D
63 71 80 90 112 125 140 160 180 200 224 250 280 315 400
450 500 560 630 710 800 900 1120 1250 1400 1600 1800 2000 2500
On recommande que la vitesse priphrique de la courroie trapzodale ne dpasse pas 30
m/s pour les courroies trapzodales troites.
i Le nombre prliminaire de courroies est calcul avec la relation:
0
0
P c c
P c
z
L
c f
=
(3.6)
o:
L
c - coefficient de longueur qui est choisi dans le tableau 3.3 en fonction de la longueur
de la courroie ltat libre, .
p
L
f
c - coefficient de fonctionnement qui est choisi en fonction de la nature de la machine
dentranement et de la machine entrane ( =1).
f
c
c - coefficient denroulement donn par la relation:
( )
1
180 003 , 0 1
= c
8
0
P - puissance nominale transmise par une courroie choisie dans les tableaux de lannexe
5 . Pour des valeurs intermdiaires des paramtres , et on va utiliser
linterpolation linaire.
M
n
1
p
D
TCT
i
0
z - nombre prliminaire des courroies.
Tableau 3.3 : Coefficient de longueur C
L
Longueur
primitive de la
courroie L
p
[mm]
Type de courroie
SPZ SPA SPB SPC
400
450
500
560
630 0,82
710 0,84
800 0,86 0,81
900 0,88 0,83
1000 0,9 0,85
1120 0,93 0,87
1250 0,94 0,89 0,82
1400 0,96 0,91 0,84
1600 1,00 0,93 0,86
1700 1,01 0,94 0,87
1800 1,01 0,95 0,88
2000 1,02 0,96 0,90
2240 1,05 0,98 0,92 0,82
2500 1,07 1,00 0,94 0,86
2800 1,09 1,02 0,96 0,88
3150 1,11 1,04 0,98 0,90
3550 1,13 1,06 1,00 0,92
3750 - 1,07 1,01 0,93
4000 - 1,08 1,02 0,94
Le nombre final de courroies:
z
c
z
z
0
=
o
z
c est le coefficient du nombre de courroies donn dans le tableau 3.4.
Le nombre rsultant est arrondi jusqu une valeur entire. On recommande . z 6 z
Tableau 3.4 : Coefficient du nombre de courroies
z
c
Nombre de courroies
0
z
z
c
23 0,95
4.6 0,90
plus de 6 0,85
9
j La frquence des changements de direction des courroies se calcule avec la
relation:
p
L
x f
v
10
3
= (Hz) (3.7)
o:
x nombre de poulies ( x=2)
v vitesse priphrique de la courroie, en m/s.
p
L - longueur ltat libre de la courroie (valeur normalise choisie), en mm.
On recommande dviter de dpasser, pour la frquence des changements de
direction, 40 Hz pour les courroies tisses, et 80 Hz pour les courroies fil central.
k La force priphrique transmise:
v
P
F
c
=
3
10 (N) (3.8)
La force qui sollicite lappui des arbres est :
0
F
(N) (3.9) F F ) 2 ..... 5 , 1 (
0
=
10
4. DIMENSIONNEMENT PRELIMINAIRE DES
ENGRENAGES
4.1. CHOIX DES MATERIAUX POUR LES ROUES DENTES ET DES
TRAITEMENTS THERMIQUES OU THERMOCHIMIQUES.
Les roues dentes cylindriques ( denture droite ou hlicodale) et coniques qui sont
utilises pour les rducteurs sont des organes de machines fortement sollicits. Les principales
sollicitations (pour lesquelles on ralise le calcul de rsistance) sont la flexion au pied de la
dent (effort unitaire,
F
) et la pression hertzienne au contact des flancs (effort unitaire,
H
).
Ces deux sollicitations varient priodiquement dans le temps. Par consquent, pour le
dimensionnement des engrenages, on doit connatre les caractristiques mcaniques gnrales
des matriaux utiliss (la limite de rupture, la limite dlasticit, la duret, etc.) et les valeurs
de la rsistance la fatigue pour les sollicitations susmentionnes (
lim F
et
lim H
). Les
valeurs des rsistances sont dtermines par des essais effectus sur des prouvettes (roues
dentes) au moyen de bancs dessais spcialiss.
Les roues dentes utilises dans la construction des machines peuvent tre ralises en
aciers lamins, forgs ou couls mais aussi en fonte, en alliages non ferreux (laiton, cuivre,
alliages daluminium, etc.) et quelques fois mme en plastique.
On utilise usuellement les aciers lamins ou forgs pour la construction des roues dentes
cylindriques et coniques des rducteurs de vitesse qui doivent transmettre une puissance
significative.
Les aciers utiliss pour la construction des roues dentes peuvent tre diviss en deux
groupes, en fonction du traitement thermique ou thermochimique quils subissent:
- aciers amliors ou normaliss pour lesquels la duret Brinell du flanc de la dent
aprs le traitement est infrieure 3500 N/mm
2
;
- aciers durcis ayant subi des traitements thermiques (trempe aprs chauffage la
flamme) ou thermochimiques (cmentation, nitruration). Leur duret Brinell aprs le
traitement est suprieure 3500 N/mm
2
.
Le tableau 4.1 prsente les principales sortes daciers utiliss pour lexcution des
roues dentes cylindriques et coniques des rducteurs de vitesse ainsi que les caractristiques
mcaniques ncessaires pour le dimensionnement des engrenages.
11
4.2. DIMENSIONNEMENT PRELIMINAIRE DES ENGRENAGES
4.2.1. Dimensionnement prliminaire dun engrenage cylindrique extrieur
denture hlicodale
Lors du dimensionnement prliminaire dun engrenage cylindrique denture
hlicodale, on dtermine lentraxe a, le module normal , langle dhlice de la denture
n
m ,
les nombres de dents des deux roues et les dports des dentures des roues dans le cas des roues
denture corrige.
Les tapes du calcul sont:
a Dtermination de lentraxe a.
En utilisant la relation de calcul de la sollicitation hertzienne (pitting) pour le
dimensionnement, on obtient la distance minimale entre les axes conformment la relation:
3
2
lim
2
) 1 (
+
W R HN
H
H
H M
a
t H V A
Z Z K
S
Z Z Z
u
M K K K
u a
pignon
(4.1)
O:
petit
grand
z
z
u = - rapport des nombres de dents ( ). 1 > u
Pour les engrenages rducteurs
2 1
= i u (rapport de transmission).
A
K - facteur de la charge dynamique extrieure. Il dpend de la nature du moteur et du
rcepteur. 1 =
A
K pour les rducteurs dutilisation gnrale.
- facteur dynamique intrieur. On prend
V
K 1 , 1 =
V
K pour le dimensionnement
prliminaire.
- facteur de la rpartition longitudinale de la charge pour la sollicitation hertzienne.
On prend =1,15 pour le dimensionnement prliminaire.
H
K
H
K
- moment de torsion larbre du pignon.
tpignon
M
I
t tpignon
M M
- coefficient de largeur dfini par
a
a
b
a
= o b est la largeur de la roue dente. Il est
choisi dans lannexe 6.
12
M
Z - facteur de matriau. E Z
M
35 , 0 = o
+ =
2 1
1 1
2
1 1
E E E
avec tant respectivement le module dlasticit longitudinal de la roue 1
(E
1
), le module dlasticit longitudinal de la roue 2 (E
2
), le module dlasticit quivalent(E).
E E E , ,
2 1
Pour des engrenages composs de roues en acier,
2
271 mm N Z
M
= .
Z
H
facteur du point de roulement. Z
H
= 177 , au dimensionnement prliminaire.
facteur de la longueur de contact. Pour le pr dimensionnement . Z
= 1
lim H
effort unitaire limite la sollicitation hertzienne, dpend de la nature du matriau
du pignon et du traitement thermique ou thermochimique appliqu (tableau 4.1).
H
S facteur de sret par rapport la sollicitation hertzienne. On utilise la valeur
minimale 25 , 1 =
H
S pour le dimensionnement prliminaire.
K
HN
facteur du nombre de cycles de sollicitation pour la sollicitation hertzienne.
K
HN
= 1 dans le cas des engrenages ayant une dure de fonctionnement illimit.
facteur de rugosit. pour le dimensionnement prliminaire. Z
R
Z
R
= 1
facteur du rapport de la duret des flancs. La valeur utilise pour le dimensionnement
prliminaire est Z
Z
w
w
= 1.
La valeur de la distance entre les axes donne par la relation (4.1) est normalise.
Lannexe 8 est un extrait de la norme. En principe, on choisit la valeur normalise suprieure
celle calcule, mais si la valeur calcule dpasse de moins de 5% une valeur normalise, on
choisit plutt cette dernire .
b - Dtermination du module normal des roues dentes m
n
La valeur minimale ncessaire du module normal de la denture des roues dcoule de la
condition de rsistance la fatigue au pied de la dent. On utilise la relation suivante:
( )
Fx s FN
F
F
a
F F F V A pignon t
n
Y Y K
S
a
Y Y K K K K u M
m
+
lim 2
1
(4.2)
O
- moment de torsion larbre du pignon ;
tpignon
M
I
t tpignon
M M .
F
K facteur de rpartition frontale de la charge. Sa valeur prliminaire est 1 =
F
K .
K
F
facteur de rpartition longitudinale de la charge pour la sollicitation au pied de
la dent. pour le dimensionnement prliminaire. K
F
= 115 ,
13
Y
F
facteur de forme. On prend de manire approximative Y
F
= 225 , pour le
dimensionnement prliminaire.
facteur de langle dhlice . Y Y
= 1pour le dimensionnement prliminaire.
a entraxe ou distance entre les axes des roues. On utilise la valeur normalis choisie
au point a.
F lim
effort unitaire limite (tension) pour la sollicitation la fatigue au pied de la
dent, cest une caractristique du matriau du pignon (cf. tableau 4.1).
F
S facteur de sret pour la sollicitation au pied de la dent. On utilise la valeur
minimale 5 , 1 =
F
S pour le dimensionnement prliminaire.
K
FN
facteur du nombre de cycles de sollicitation au pied de la dent. On
prendK
FN
= 1 pour une dure illimite de fonctionnement des engrenages.
Y
s
facteur de concentration des contraintes. Y
s
= 1 pour le dimensionnement
prliminaire.
Y
Fx
facteur dimensionnel. Sa valeur prliminaire est Y
Fx
= 1.
Les valeurs des autres facteurs( )
a A V
K K , , seront les mmes que celles utilises au
point prcdent (point a).
La valeur calcule pour le module normal est galement normalise (annexe 7). Si
la valeur calcule est infrieure 1 mm, on prend =1 mm. En principe, on choisit dans
les normes la valeur immdiatement suprieure la valeur calcule du module normal. On
peut utiliser aussi la valeur normalise immdiatement infrieure celle calcule si la
diffrence entre les deux est infrieure 5% de la valeur normalise.
m
n
m
n
m
n
c Etablissement de langle dhlice .
On recommande le choix dune valeur de langle dhlice (exprime en degrs)
comprise dans lintervalle
[
. Pour rduire le nombre de manipulations lors de lusinage
de ces engrenages, on recommande lutilisation des valeurs suivantes:
]
8 20
o o
;
- pour des roues dentes excutes en aciers amliors ou en aciers
normaliss (ayant la duret Brinell du flanc <3500 N/mm
2
).
= 15 12
o o
( )
- = pour des roues dentes excutes en aciers durcis superficiellement 10
o
(HB flanc ). 3500
2
N / mm
d Etablissement du nombre de dents du pignon . z
1
On calcule le nombre maximum de dents du pignon en utilisant les valeurs de lentraxe
et du module normal dtermins aux points a et b:
14
( ) u m
a
z
n
+
=
1
cos 2
max 1
(4.3)
On choisit un nombre de dents du pignon satisfaisant aux conditions suivantes: z
1
- z
1
doit tre un nombre entier infrieur calcul avec la relation (4.3). z
1max
- z ; si cette condition nest pas satisfaite, on augmente lentraxe la valeur
normalise immdiatement suprieure celle choisie prcdemment et on recalcule
1
14
m et .
n
z
1
max
- si on choisit un dport positif de la denture pour viter linterfrence de
taillage.
[
z
1
14 17 ;
]
)
- si le nombre de dents du pignonz
1
max
calcul est grand (z
1
max
>24,...,50(80)), on
utilise un nombre de dents z
1
plus petit afin davoir une prcision dexcution:
si . z z
1 1
max
z
1
25
max
e Choix final du module normal m de la denture et des nombres de dents du
pignon ( ) et de la roue ( )
n
z
1
z
2
On recalcule le module normal avec la relation: m
n
( u z
a
m
n
+
=
1
cos 2
1
(4.4)
La valeur donne par la relation (4.4) est re normalise ( cf. point b).
On recalcule
( ) u m
a
z
n
+
=
1
cos 2
1
La valeur de sera la valeur entire immdiatement infrieure la valeur calcule.
On calcule et on choisit
z
1
1
z
2 1 2
i z =
z N
2
. On recommande que ne soit pas divisible par
(si possible prendre et premiers entre eux). Cette condition est satisfaite usuellement
par laddition ou la suppression dune dent la roue.
z
2
z
1
z
1
z
2
f - Calcul du rapport de transmission effectif de lengrenage:
i
z
z
ef
=
2
1
(4.5)
Aprs le dimensionnement prliminaire de lengrenage, une vrification du rapport de
transmission effectif du rducteur simpose :
2 1
i
15
=
1
2
z
z
i
ef
(4.6)
Il faut que lcart entre celui-ci et la valeur donne initialement dans lnonc du projet i
(cf. point 1.2) ne dpasse pas 3%:
RT
% 3 % 100
2 1
2 1
i
i i
ef
i
(4.7)
Si la condition nest pas remplie, on modifie le nombre de dents de la roue choisi au point e.
g. - Calcul du dport de la denture
Le dport de la denture des roues cylindriques a des avantages comme: laugmentation
de la puissance transmise, labsence dinterfrence de taillage, laccroissement du rapport de
transmission. De plus, le dport de la denture permet de choisir la distance de rfrence entre
les axes (correspondant lengrenage ralis par des roues denture non dporte) gale
une valeur standardise. Dhabitude on utilise le dport positif (coefficient de dport x >0), ce
qui implique la croissance de la largeur de la base de la dent (et implicitement la croissance de
la rsistance la flexion de la dent).
a
0
Pour dterminer les valeurs des coefficients de dport du profil des deux roues, on doit
parcourir les tapes suivantes (le calcul sera fait avec une prcision de cinq dcimales):
- on calcule la distance de rfrence entre les axes:
( )
a
m z z
n
0
1 2
2
=
+
cos
(4.8)
a
0
doit satisfaire aux conditions suivantes:
- choisi au point a pour avoir un dport positif de la denture.
NORME
a a
0
- pour que le dport positif produise ses effets bnfiques
et que la diminution de lpaisseur de la tte de la dent ne soit pas exagre.
(
n n NORME
m m a a 3 , 1 ; 4 , 0
0
)
Si ces conditions ne sont pas satisfaites, on modifie soit le nombre de dents de la roue soit
le module normal normalis choisi (on reprend le calcul du point c).
z
2
- on calcule langle de pression sur le cylindre primitif sur le plan frontal
t
t
n
arctg
tg
=
cos
(4.9)
16
O
n
est langle de pression sur le cylindre primitif sur le plan normal.
(
n
= =
0
20
o
0
angle du profil de rfrence).
- on calcule langle dengrnement sur le plan frontal
wt
(angle de pression sur le cylindre de
roulement en plan frontal):
=
t
NORME
wt
a
a
cos arccos
0
(4.10)
- on calcule la somme des dports des deux roues:
( )
n
t wt
s
tg
inv inv
z z x x x
2
2 1 2 1
+ = + = (4.11)
o inv tg
=
180
o
(4.12)
La rpartition des dports du profil sur les deux roues est faite laide du diagramme
de lannexe 9. La procdure est la suivante : on porte en ordonn
2
x
s
et en abscisse
2
2 1
z z +
. Le point obtenu se situe gnralement entre deux lignes et . Le prolongement
des lignes permet dobtenir l origine O du diagramme. En joignant lorigine O et le
point considr, on obtient une droite sur laquelle labscisse fixe le dport .
i
R
1 + i
R
i
R
1 + i
R
1
z
1
x
On calcule ensuite avec la relation :
2
x
( )
1 2 1 1 2
x x x x x x
s
+ = = (4.13)
4.2.2. Pr-dimensionnement dun engrenage conique a denture droite
Lors du dimensionnement prliminaire dun engrenage cylindrique denture
hlicodale, on dtermine la distance entre les axes des roues ou entraxe a, le module
normal , langle dhlice de la denture
n
m , le nombre de dents de la roue et du pignon ainsi
que les dports des dentures des roues (dans le cas des roues denture modifie).
Par contre, lors du dimensionnement prliminaire de lengrenage conique, on
dtermine le diamtre primitif du pignon ( ), le module normal sur le cne frontal
extrieur et le nombre de dent du pignon et de la roue ( , ).
d
1 n
m
z
1
z
2
17
On va tudier le cas des roues coniques denture droite non dporte .
Les tapes du calcul sont :
a. Calcul du diamtre primitif du pignon conique sur le cne frontal extrieur
1
d
En utilisant la relation de calcul de la sollicitation hertzienne (pitting), on va
dimensionner le diamtre primitif du pignon sur le cne frontal moyen, : d
m1
3
2
lim
tpignon
4
1
w R HN
H
H
H M
Rm
H V A
m
Z Z K
S
Z Z
u
K K K M
d
(4.14 )
o:
- moment de torsion larbre du pignon.
tpignon
M
tI tpignon
M M =
A
K - facteur de la charge dynamique extrieure. Il dpend de la nature du moteur et de
la nature de la machine de travail. 1 =
A
K pour des rducteurs dutilisation
gnrale.
- facteur dynamique intrieur. Pour le pr-dimensionnement, on
V
K
prend . 15 , 1 =
V
K
- facteur de la rpartition longitudinale de la charge pour la sollicitation
H
K
hertzienne. On prend =1,35 pour le dimensionnement prliminaire.
H
K
Rm
coefficient de largeur :
Rm
m
b
R
= = 03 035 , , K , avec
b largeur de la roue conique,
R
m
longueur moyenne de la gnratrice du cne primitif.
=
petit
grand
z
z
u le rapport des nombres des dents. Pour les engrenages de type
rducteur u = . Sa valeur a t dtermine au point 1.2.
2 1
i
facteur de matriau .
M
Z
2
N/mm 271 =
M
Z pour les engrenages composs
par des roues en acier.
Z
H
facteur du point de roulement. Pour le pr-dimensionnement, on prend
Z
H
= 177 , .
lim H
effort unitaire limite pour la sollicitation hertzienne. Il dpend de la nature du
matriau du pignon et du traitement thermique ou thermochimique appliqu
(tableau 4.1).
18
S
H
facteur de sret pour la sollicitation hertzienne. On peut utiliser la valeur
minimale 5 , 1 =
H
S pour le dimensionnement prliminaire.
K
HN
facteur bre de cycles de sollicitation pour la so du nom llicitation hertzienne.
K
HN
= 1 pour les engrenages conus pour une dure de fonctionnement
illimite.
facteur de rugosit. Sa valeur prliminaire est Z
R
Z
R
= 1.
facteur du rapport de la duret des flancs. Z
w
Z
w
1 = pour le dimensionnement
itif du pignon sur le cne frontal extrieur
(4.15)
nombre entier (
prliminaire.
On calcule le diamtre prim d
1
:
( )
Rm m
d d + = 5 , 0 1
1 1
d
1
doit tre un N d
1
), exprim en mm.
b. Calcul du module sur le cne frontal extrieur m.
On va dimensionner le module sur le cne mdian sur base de lexpression de
leffort
m
m
au pied de la dent.
On obtient la relation:
Fx s FN
F
F
m Rm
F F V A
m
Y Y K
S
d
Y K K K K M
m
=
lim 2
1 tpignon
1
sin 4
(4.16)
o:
A
K - facteur de la charge dynamique extrieure. Il dpend de la nature du moteur
et de la nature de la machine de travail. 1 =
A
K pour des rducteurs dutilisation
gnrale.
V
K - facteur dynamique intrieur. Pour le pr-dimensionnement, on
eur de la artition longitudinale de la charge au pied de la dent.
.
prend 15 , 1 =
V
K .
K
F
fact rp
K
F
= 135 , pour le pr-dimensionnement.
K
facteur de la rpartition frontale de la charge K
= 1 pour le
pr-dimensionnement.
Y
F
facteur de forme. Il est choisi dans lannexe 10 pour x=0 ( denture non
dporte) et pour un nombre des dents estim 21 , , 12
1
K = z . Aprs le
pr - dimensionnement, on recommence le calcul si le nombre de dents est trs
diffrent de celui estim.
1
- demi-angle du sommet du cne primitif du pignon. Il est donn par
lexpression suivante:
19
+
=
sin
1
tg
cos i
(4.17)
o - langle entre les ax
On utilise frquemm
es des roues qui composent le couple conique.
ent des engrenages coniques orthogonaux (
o
90 = ) do:
i
arctg
1
1
= (4.18)
lim
F
- effort unitai
ur la sollicitation au pied de la dent.
re de la sollicitation du pied de la dent du matriau du pignon
(cf. tableau 4.1).
F
S - facteur de sret po 2 =
F
S pour le pr-
dimensionnement
K
FN
facteur du nombre de cycles de sollicitation au pied de la dent. On prend
K
FN
= 1pour les engrenages conus pour une dure de fonctionnement
illimite.
Y
s
facteur de co Y
s
= 1 ncentration des contraintes. Sa valeur prliminaire est .
Y
Fx
facteur dimensionnel. On prendY
Fx
= 1 pour le dimensionnement p in rlim aire.
n dtermine trieur O le module sur le cne frontal ex m :
) 5 , 0 1 (
m
R m
m (4.19)
valeur normalise suprieure au module calcul m.
c. Calcul de nombre de dents du pignon z
1
.
n calcule le nombre maximum de dents du pignon:
m + =
Et on choisit la
O
m
d
z
1
max 1
= (4.20)
e manire On choisira z d vrifier les conditions suivantes:
1
- Pour des rapports de transmission ordinaires ( ) 5 1 < i , on recommande
n conformit avec les recommandations des fabricants, le nombre minimal de
Tableau 4.2 : Nombre minimal de dents z
1
recommand pour le pignon conique
14 ,..., 12
1
z
- E
dents du pignon est repris dans le tableau 4.2
i 1 2 3 4 5 6,3
18 40 15 30 12 23 10 18 8 14 6 14
1
z
Remarque: Si les conditions du tableau 4.2 ne sont pas satisfaites, on agrandit le diamtre
primitif du pignon conique et on recalcule le module m.
20
21
ec le nombre de dent choisi:
d. Choix final du module et des nombres de dents
1
z On recalcule le module sur le cne frontal extrieur av
1
z
1
d
m = (4.21)
alis (cf. annexe 7). On
nouvelle valeur du module sur le cne:
Ce module est norm recalcule galement le nombre de dent
1
z avec la
m
d
z
1
1
=
On choisit la valeur finale z et on dterm
(4.22)
ine :
1
(4.23)
1 2
z u z =
z
2
doit tre un nombre entier (z N
2
). On recommande que ne soit pas divisible par
ible
fe if de lengrenage conique :
u rapport de
ansmission effectif du rducteur i
ef
simpose.
z
2
z
1
(prendre si poss et z
2
premiers entre eux). Cette condition est remplie usuellement par z
1
laddition ou la suppression dune dent la rouez
2
.
e. Calcul du rapport de transmission ef ct
Aprs le dimensionnement prliminaire de lengrenage, une vrification d
tr
=
1
2
z
z
i
ef
(4.24)
Il faut que lcart en
1
i tre celui-ci et la valeur donne initialement dans lnonc du projet
(cf. point 1.2) ne dpasse pas 3%:
2
% 3 % 100
2 1
2 1
i
i i
ef
i
(4.25)
Tableau 4.1.
Aciers recommands pour la construction des roues dentes cylindriques et coniques des rducteurs
Duret
Matriau
DIN
STAS
Traitement
thermique ou
thermochimique
noyau
( ) HB
flanc
( ) HRC
Rsistance la
rupture,
r
( )
2
/ mm N
Limite
dlasticit,
c
( )
2
/ mm N
Rsistance limite la
fatigue au pied de la
dent
lim f
( )
2
/ mm N
Pression
hertzienne
limite la
fatigue,
lim H
( )
2
/ mm N
OL 50 Fe 490-2 (St 50-2) 500/2-80 Normalisation
170 150 = HB 620 500 300 270 100 4 , 0 + HB 120 5 , 1 + HB
OL 70 Fe 690-2 (St 70-2) 500/2-80 Normalisation
220 200 = HB 850 700 370 340 100 4 , 0 + HB 120 5 , 1 + HB
Amlioration
260 220 = HB 140 4 , 0 + HB 200 5 , 1 + HB
OLC 45* C 45 880-88
Trempe aprs
chauffage la
flamme ou CIF
260 200 57 50
620 360
170 160
10 20 + HRC
Amlioration
300 200 = HB 140 4 , 0 + HB 200 5 , 1 + HB
OLC 55 C55 880-88
Trempe aprs
chauffage la
flamme ou CIF
300 200 57 50
720 420
190 180
20 20 + HRC
Amlioration
320 270 = HB 155 4 , 0 + HB 200 8 , 1 + HB
Trempe aprs
chauffage la
flamme ou CIF
320 270 57 50
290 230
60 20 + HRC
41 MoCr 11 42 CrMo 4 791-88
Nitruration 320 270 60 52
950 750
350 250 HRC 20
Amlioration
340 240 = HB 155 4 , 0 + HB 200 8 , 1 + HB
Trempe aprs
chauffage la
flamme ou CIF
340 240 57 50 290 230 60 20 + HRC
40 Cr 10 41 Cr 4 791-88
Nitruration 340 240 57 50
1000 800
350 250 HRC 20
34 MoCrNi 15 34 CrNiMo 6 791-88 Amlioration
330 310 = HB 1100 900 155 4 , 0 + HB 200 8 , 1 + HB
OLC 15* C 15 880-88 Cmentation 120 140 63 55 390
280
150 140 HRC 24
21 12 MoMnCr 20 5 CrMo 791-88 Cmentation 300 350 63 55 1100
850
460 390 HRC 5 , 25
22
5. ELEMENTS GEOMETRIQUES DES ROUES DENTES
5.1. ELEMENTS GEOMETRIQUES DES ROUES CYLINDRIQUES A
DENTURE HELICODALE.
Fig. 5.1. Elments gomtriques des roues dentes cylindriques denture hlicodale.
On calcule les lments gomtriques suivants:
- le nombre de dents:
( ) 2 1
z
- langle dinclinaison sur le cylindre primitif galement appel angle dhlice:
-
langle de pression sur le cylindre primitif en plan normal galement appel
angle de pression rel: 20 =
n
0
- langle de pression sur le cylindre primitif en plan frontal galement appel
angle de pression apparent:
t
(cf. rel. 4.9.)
- langle dengrnement en plan frontal:
t
w
(cf. rel.4.10.)
- le module normal ou module rel:
n
m
- le pas normal ou pas rel (sur le cylindre primitif):
n n
m p = (5.1)
- le module frontal ou module apparent:
cos
n
m
= (5.2)
t
m
23
- le pas frontal galement appel pas apparent (sur le cylindre primitif):
t t
m p = (5.3)
- le coefficient de dplacement du profil ou dport:
(
) 2 1
x
- la hauteur de la tte de la dent ou saillie:
( ) ( )
( )
( )
( )
2 1
2 1
*
0
2 1
1 x m x h m h
n a n a
+ = + = (5.4)
o =coefficient de la hauteur de la tte de rfrence 1
*
0
=
a
h
- la hauteur du pied de la dent ou creux:
( )
( )
( )
( )
2 1 2 1
*
0
2 , 1
25 , 1 x m x h m h
n f n f
= = (5.5)
o =coefficient de la hauteur du pied de rfrence 25 , 1
*
0
=
f
h
- la hauteur de la dent: ( )
n f a n f a
m h h m h h h 25 , 2
*
0
*
0
= + = + = (5.6)
- le diamtre de division ou diamtre primitif:
( ) ( )
( )
cos
2 1
2 1 2 1
z m
z m d
n
t
= = (5.7)
- le diamtre du cercle de tte:
( ) ( ) 2 1 ) 2 ( 1 2 1
2
a a
h d d + = (5.8)
- le diamtre du cercle de pied:
( )
( )
( ) 2 1
2 1
2
2 1
f f
h d d = (5.9)
- le diamtre du cercle de base:
( )
( ) t b
d d cos
2 1
2 1
= (5.10)
- le diamtre de roulement:
( ) ( )
t
w
t
w
d d
cos
cos
2 1 2 1
= (5.11)
- la largeur de la denture de la roue:
a
a b =
2
(5.12)
Dhabitude, on utilise la valeur de la largeur de la denture de la roue donne par
la relation (5.11) et pour le pignon, on prend une valeur un peu suprieure (majore
de 2 5 mm) afin de compenser les erreurs de montage axial.
- le diamtre primitif de la roue virtuelle (roue quivalente):
( )
( )
2
2 1
2 1
cos
d
d
n
= (5.13)
- le nombre de dents virtuel (roue quivalente):
( )
( )
3
2 1
cos
2 1
z
z
n
= (5.14)
24
5.2. Elements geometriques des roues dentees coniques a denture droite pour
un engrenage orthogonal ( )
o
90 =
Fig. 5.2. Elments gomtriques dun engrenage conique denture droite
On calcule les lments gomtriques suivants:
- le nombre de dents :
( ) 2 1
z
- le demi-angle du cne de division appel aussi angle primitif:
- pour le pignon :
=
2
1
1
arctg
1
arctg
z
z
i
ef
(5.15)
- pour la roue : (5.16)
1 2
90 =
o
- le module sur le cne frontal extrieur: m
- le pas sur le cne frontal extrieur: m p = (5.17)
25
- le coefficient de largeur:
m
R
- le module sur le cne frontal mdian ou moyen:
m
R
m
m
m
+
=
5 , 0 1
(5.18)
- la hauteur de la tte de la dent: m m (5.19) h h
a a
= = 1
*
0
o - coefficient de la hauteur de la tte de rfrence. 1
*
0
=
a
h
- la hauteur du pied de la dent: m (5.20) m h h
f f
= = 2 , 1
*
0
o - coefficient de la hauteur du pied de rfrence 2 , 1
*
0
=
f
h
- la hauteur de la dent: ( ) m m h h h h h
f a f a
2 , 2
*
0
*
0
= + = + = 5.21)
- le diamtre de division ou diamtre primitif sur le cne frontal extrieur:
( ) ( ) 2 1 2 1
z m d = (5.22)
- le diamtre de division ou diamtre primitif sur le cne frontal mdian:
( )
( ) 2 1
2 1
z m d
m m
= (5.23)
- le diamtre du cercle de tte:
( )
( ) ( ) 2 1 2 1
2 1
cos 2
a a
h d d + = (5.24)
- le diamtre du cercle de pied:
( )
( ) ( ) 2 1 2 1
2 1
cos 2
f f
h d d = (5.25)
- la longueur extrieure de la gnratrice du cne primitif:
( )
( ) 2 1
2 1
sin 2
d
R = (5.26)
- la longueur moyenne de la gnratrice du cne primitif:
( )
( ) 2 1
2 1
sin 2
m
m
d
R = (5.27)
- la largeur de la denture:
m R
R b
m
= (5.28)
- langle de la tte de la dent:
=
R
h
a
a
arctg (5.29)
- langle du pied de la dent:
=
R
h
f
f
arctg (5.30)
- langle de la dent:
f a
+ = (5.31)
- le demi-angle au sommet du cne de tte:
a a
+ = (5.32)
- le demi-angle au sommet du cne de pied:
f f
= (5.33)
- le diamtre de division virtuel (roue quivalente):
( )
( )
( ) 2 1
2 1
2 1
cos
d
d
v
= (5.34)
- le nombre de dents virtuel (roue quivalente):
( )
( )
( ) 2 1
2 1
2 1
cos
z
z
v
= (5.35)
26
- le diamtre de tte virtuel (roue quivalente):
(5.36)
( )
( )
( ) 2 1
2 1
2 1
2ha d d
v a
v
+ =
- le diamtre de base virtuel (roue quivalente):
(5.37) cos
2 , 1
2 , 1
v b
d d
v
=
- la distance entre les axes ou lentraxe pour un engrenage cylindrique
quivalent:
2
2 1
v v
v
d d
a
+
= . (5.38)
6. CALCUL DES FORCES DANS LES ENGRENAGES
6.1. FORCES DANS UN ENGRENAGE CYLINDRIQUE HELICOIDAL.
Une force normale apparat au contact de deux dents. Celle-ci peut tre
dcompose en trois composantes selon trois directions orthogonales: la force
tangentielle , la force radiale
n
F
t
F
r
F et la force axiale conformment la figure 6.1. On
calcule les trois composantes sur le cercle primitif de la roue.
a
F
Fig. 6.1. Forces dans un engrenage cylindrique hlicodal.
27
On nglige les pertes de puissance dans les engrenages, les forces de frottements
tant faibles. Par consquent, on calcule les forces actionnant le pignon en utilisant le
moment de torsion moteur ( larbre du pignon), et les forces qui agissent sur la roue
mene sont prises gales en module et de sens contraire (conformment au principe de
laction et de la raction).
Les relations de calcul des forces dans un engrenage cylindrique hlicodal sont:
- Pour les forces tangentielles:
1
2
2 1
d
M
F F
I t
t t
= = (6.1)
- Pour les forces radiales:
t t
n
t r r
tg F
tg
F F F =
= =
1 1 2 1
cos
(6.2)
- Pour les forces axiales:
= = tg F F F
t a a
1 2 1
(6.3)
- Pour la force normale:
= + + =
cos cos
1
1 1 1
2 2 2
n
t
r a t
n
F
F F F F (6.4)
On doit mentionner que le sens des forces et dpend du sens de rotation de la
roue et du sens dinclinaison des dents. La force radiale
t
F
a
F
r
F a toujours le mme sens, elle
est dirige vers laxe de rotation.
La figure 6.2 prsente le schma des forces qui agissent sur les arbres du rducteur
de vitesse un tage de rduction (rducteur roues dentes cylindriques denture hlicodale).
A
I
1
B
C
II
2
D
r2 F
Fa
F
Fr1
Fa2
Fr1
Fr2
a1
Fig. 6.2. Forces sur les arbres dun rducteur cylindrique
28
6.2. Forces dans un engrenage conique a denture droite
Comme le calcul de rsistance seffectue pour lengrenage cylindrique remplaant
(quivalent) sur le cne frontal mdian, on considre la force normale sur la dent
applique dans le point dintersection de la ligne dengrnement avec le cercle primitif
moyen. La force normale se dcompose en trois composantes orthogonales: la force
tangentielle au cercle primitif moyen, la force radiale
n
F
n
F
t
F
r
F et la force axiale .
a
F
Fig. 6.3. Forces dans un engrenage conique denture droite
On nglige les pertes de puissance dans les engrenages (donc les forces de
frottement). Puis, on calcule les forces dues au moment de torsion larbre moteur ( )
qui agissent sur le pignon. Les forces qui actionnent la roue mene sont considres gales
et de sens contraire (conformment au principe de laction et de la raction).
I t
M
Dans le cas dun engrenage conique orthogonal ( )
o
90 = , les forces opposes
et sont respectivement et .
1
a
F
1
r
F
2
r
F
2
a
F
29
Les relations de calcul des forces dans un engrenage conique orthogonal denture
droite sont:
- Pour les forces tangentielles:
1
2 1
2
m
pinion t
t t
d
M
F F = = (6.5)
- Pour les forces radiales:
1
cos
1 1
= tg F F
t r
(6.6)
2
cos
1 2
= tg F F
t r
(6.7)
- Pour les forces axiales:
2 1 1
1
sin
r t a
F tg F F = = (6.8)
1 1 2
2
sin
r t a
F tg F F = = (6.9)
- Pour la force normale sur le flanc de la dent:
= + + =
cos
1
1 1 1
2 2 2
t
r a t
n
F
F F F F (6.10)
Le sens de la force tangentielle agissant sur une roue conique dpend du sens de
rotation. Les forces radiale
t
F
r
F et axiale ont toujours le mme sens.
a
F
La figure 6.4 prsente le schma des forces sur les arbres du rducteur de vitesse
un tage de rduction ( rducteur roues dentes coniques denture droite).
Fr1 B
Fo
A
Fa1
Fa2
Fr1
I
1
2
C
Fr2
II
D
Fr2
Fig. 6.4. Forces sur les arbres dun rducteur conique
30
7. VERIFICATIONS DES ENGRENAGES
7.1. VERIFICATION DES CONDITIONS DE TAILLAGE ET
DENGRENEMENT
Il faut dune part vrifier que lengrenage ne prsente pas de problmes lors de son
usinage ( sous-taillage et rduction dpaisseur de la tte de la dent) et dautre part vrifier
que lengrnement est satisfaisant ( continuit dengrnement, interfrence possible, jeu
minimum sur le cercle de tte).
7.1.1. Verification du sous-taillage des dents
Pour viter le sous-taillage (cest--dire linterfrence lors de lopration
dusinage), on doit respecter la condition:
(7.1)
( ) ( )
z z
n
1 2 1 2
min
o:
( ) ( )
z z
n
1 2 1 2
3
cos est le nombre de dents de la roue quivalente (virtuelle) la
roue cylindrique denture helicoidale
( ) 2 1
min
z est le nombre minimal de dents de la roue cylindrique denture helicoidale
qui peut tre usine sans sous-taillage avec un angle dinclinaison primitif et un
dplacement spcifique (dport) du profil x.
z
min
est donn par la relation:
( )
( )
( )
z
h x
a
t
min
cos
sin
1 2
2
0 12
2
=
(7.2)
o reprsente le coefficient de hauteur de la tte de la dent de rfrence. ( )
a
h
0
1
0
=
a
h
7.1.2. Verification de la continuite de lengrenement
Pour lengrenage cylindrique denture helicoidale, le degr de recouvrement total
(ou rapport total de conduite)
est donn par la relation:
= + (7.3)
o:
le degr de recouvrement du profil en plan frontal
(ou rapport de conduite apparent);
31
le degr de recouvrement supplmentaire d linclinaison des dents
(avancement des flancs) . Il est galement appel rapport de recouvrement.
On utilise les relations:
t t
w
t t
b a
t t
b a
a
os m
a
m
d d
m
d d
t
sin
cos 2 cos 2
2 2 2 2
2 1
2 2 1 1
= + = (7.4)
=
b
m
n
2
sin
(7.4)
Pour assurer la continuit du processus dengrnement, on doit vrifier la condition:
-
11 , pour les engrenages prcis (classes 5, 6, 7),
-
13 , pour les engrenages de prcision modre (classes 8, 9, 10, 11).
Pour un engrenage conique denture droite, on calcule le degr de recouvrement de
lengrenage cylindrique quivalent (virtuel) qui doit vrifier la condition:
cos
sin
cos 2 cos 2
2 2 2 2
2 1
2 2 1 1
m
a
m
d d
m
d d
t
V V V V w v
b a b a
a
= + = (7.5)
7.1.3. Verification des interferences des dents
Le diamtre du cercle o dbute le profil en dveloppante dpend du procd
technologique dexcution de la denture. Considrons le cas usuel de lexcution de la
denture par utilisation dune fraise qui a le profil de la crmaillre gnratrice, la relation
qui permet le calcul du diamtre du cercle o dbute le profil en dveloppante est la
suivante:
( )
d
l
1 2
( )
2
1
) 2 (
1
*
0
cos sin
cos 2
1
) 2 (
) 2 ( 1 ) 2 ( 1
+ =
t t
t b l
z
x h
tg d d
a
(7.6)
Les diamtres des cercles dlimitant les profils actifs des flancs des dents et (cest-
-dire les diamtres des cercles sur lesquels sont situs le point o dbute lengrnement
sur les flancs des dents du pignon et le point o finit lengrnement sur les flancs des
dents de la roue ) sont donns par:
1
A
d
2
E
d
1
A
d
2
E
d
1
1
1
cos
A
b
A
d
d
= et
2
2
2
cos
E
b
E
d
d
= (7.7)
o:
32
1
2
) ( 2
1
z
tg
a
A
= et
2
1
) ( 2
2
z
tg
a
E
= (7.8)
Les conditions remplir afin davoir un engrnement correct des deux roues ( pour viter
linterfrence des dents lors de lengrnement), sont:
et (7.9)
1 1
l A
d d
2 2
l E
d d
7.1.4. Verification du jeu a la tete des dents
Pour un engrenage cylindrique denture helicoidale, on calcule le jeu la tte des dents
avec la relation:
2 2
2 1 2 1
a f f a
d d
a
d d
a c
+
=
+
= (7.10)
Le jeu doit vrifier la condition:
n
m c 1 , 0 (7.11)
Si cette condition nest pas remplie, on diminue les dimensions de la tte de la dent
( reduction de saillie) de manire obtenir le jeu minimal admissible .
n a
m c 1 , 0 =
7.1.5. Verification de lpaisseur des dents sur le cercle de tte
Pour les roues cylindriques denture helicoidale, le dport positif des profils mne
une rduction de lpaisseur des dents sur le cercle de tte.
On va vrifier cette epaisseur en calculant la longueur de larc correspondant la
dent sur le cercle de tte dans le plan frontal et en la comparant avec une valeur
minimale admissible.
t
a
s
+
+
=
) 2 ( 1
) 2 ( 1
) 2 ( 1
) 2 ( 1
) 2 ( 1
2
4
t
a t
n
a a
inv inv
z
tg x
d s
t
(7.12)
o
at
est langle de pression sur le cercle de tte en plan frontal. Il est donn par la
relation:
=
t
a
a
d
d
t
cos arccos
) 2 ( 1
) 2 ( 1
) 2 ( 1
(7.13)
Pour viter lendommagement de la tte de la dent cause de la rduction
dpaisseur, on recommande de respecter la condition:
- pour les roues en acier amlior
t at
m s 2 , 0
) 2 ( 1
- pour les roues denture durcie superficiellement.
t at
m s 4 , 0
) 2 ( 1
Si cette condition nest pas satisfaite, on peut soit modifier la rpartition de la
somme des dports entre les deux composantes x
1
et x
2,
soit rduire les diamtres des
s
x
33
cercles de tte (rduction de saillie) afin vrifier la condition relative au degr de
recouvrement
(ou rapport de conduite apparent).
7.2. VERIFICATION DE LA RESISTANCE DE LA DENTURE DES
ROUES DENTES
7.2.1. Verification de la sollicitation au pied de la dent
Un effort unitaire maximal apparat au pied de la dent. Il est d une flexion
variable cycliquement dans le temps. Aprs un nombre de cycles de sollicitation, une
rupture par fatigue peut se produire au pied de la dent. La vrification de la sollicitation au
pied de la dent est faite en calculant leffort unitaire d la flexion
F
et en le comparant
une valeur admissible
Fp
.
7.2.1.1. Cas des engrenages cylindriques denture helicoidale
Le calcul de la rsistance la fatigue est effectu dans une section normale pour les
roues quivalentes (virtuelles). Le critre de rsistance de la dent est:
FX S FN
F
F
F
F V A F
n
t
F
)
Y Y K
S
Y K K K K Y
m b
F
p
=
=
) 2 ( 1 lim
) 2 ( 1
) 2 ( 1
) 2 ( 1
) 2 ( 1
) 2 ( 1
(7.14)
o:
2 ( 1 F
- leffort unitaire de flexion au pied de la dent;
) 2 ( 1 t
F - la force tangentielle au niveau du cercle primitif;
) 2 ( 1
b - la largeur de la roue;
n
m - le module normal de la denture;
) 2 ( 1 F
Y - le facteur de forme de la dent (cf. annexe 10). Il est dtermin en fonction
du nombre de dents de la roue quivalente et du dport du
profil ;
) 2 ( 1 n
z
) 2 ( 1
x
A
K - le facteur de la charge dynamique extrieure(ou facteur dapplication). Pour
un rducteur dutilisation gnrale, on considre que
A
K =1;
V
K - le facteur dynamique interne (annexe 11) qui dpend de la vitesse
priphrique sur le cercle primitif
60000
v
1 pignon
n d
=
(m/s) o d
1
est le
diamtre primitif du pignon (en mm) et n
pignon
est la vitesse de rotation de
larbre du pignon (en tr/min).
34
K - le facteur de rpartition frontale de la charge. Pour les engrenages excuts
trs prcisment et fortement chargs, on prend
1 ,
1
K . Pour les
engrenages usuels, on choisira =1;
K
F
K - le facteur de distribution longitudinale de la charge pour une sollicitation au
pied de la dent. On le dterminera sur le diagramme prsent dans lannexe
14. Il dpend du facteur de distribution longitudinale de la charge pour la
sollicitation hertzienne . Ce dernier est prsent dans les annexes 12 et
13 respectivement pour les dentures cylindriques et coniques ralises en
aciers durcis superficiellement.
H
K
Pour les engrenages ayant au moins une des roues denture de duret petite
moyenne (HB< 3500 N/mm
2
), un meilleur rodage est ralisable et le facteur de distribution
longitudinale sera dtermin par la relation:
F
K
2
1
H
F
K
K
+
= (7.15)
Y est le facteur de langle dinclinaison. Il est dtermin par la relation :
0
120
1
= Y (7.16)
lim F
- la rsistance limite la fatigue par flexion au pied de la dent (cf. tableau 4.1).
F
S - le facteur de sret par rapport la rupture par fatigue au pied de la dent. Sa
valeur usuelle est 1,5;
min
F
S
FN
k - le facteur du nombre de cycles de fonctionnement pour la sollicitation au pied
de la dent (facteur de dure). on considre que :
FN
k =1 pour
7
10 N cycles,
FN
k =(10
7
/N)
1/9
pour 10
3
N < 10
7
o N est le nombre de cycles de sollicitation auquelle est soumise la dent de
la roue pendant le fonctionnement de lengrenage.
s
Y - le facteur de concentration de contrainte. Il prend en considration linfluence
du rayon de raccordement au pied de la dent. Sa valeur usuelle est . 1 =
s
Y
x
F
Y - le facteur dimensionnel.
Si mm 5 ,
x
F
Y =1
n
m
Si mm 30 5 < <
n
m :
- pour des dentures durcies superficiellement
n F
m Y
x
01 , 0 05 , 1 =
- =1,03-0,006 pour des dentures en aciers amliors
x
F
Y
n
m
35
7.2.1.2. Cas des engrenages coniques a denture droite
Le calcul de rsistance seffectue pour un engrenage virtuel (cylindrique denture
droite) dans la section mdiane de la largeur de la roue. Le critre de rsistance auquel doit
satisfaire leffort unitaire au pied de la dent
F
est:
Fx S FN
F
F
F F V A F
m
t
F
Y Y K
S
K K K K Y
m b
F
p
lim
) 2 ( 1
) 2 ( 1
) 2 ( 1
=
= (7.17)
o:
) 2 ( 1 F
- leffort unitaire de flexion au pied de la dent;
) 2 ( , 1 t
F - la force tangentielle au niveau du cercle primitif mdian;
b - la largeur de la roue;
m
m - le module sur le cne frontal mdian;
) 2 ( , 1 F
Y - le facteur de forme de la dent. Il est choisi lannexe 10 en fonction du nombre
de dents de la roue quivalente et pour
) 2 ( 1 v
z 0 = x ;
A
K - le facteur de la charge dynamique extrieure(ou facteur dapplication). Pour un
rducteur dutilisation gnrale, on considre que
A
K =1;
V
K - le facteur dynamique interne (annexe 11) qui dpend de la vitesse priphrique
sur le cercle primitif
60000
v
1 pignon
n d
=
(m/s) o d
1
est le diamtre primitif du pignon
(en mm) et n
pignon
est la vitesse de rotation de larbre du pignon (en tr/min).
K - le facteur de rpartition frontale de la charge. Pour les engrenages excuts trs
prcisment et fortement chargs, on prend
1 ,
1
K . Pour les engrenages
usuels, on choisira =1;
K
F
K - le facteur de distribution longitudinale de la charge pour une sollicitation au pied
de la dent. On le dterminera sur le diagramme prsent dans lannexe 14. Il
dpend du facteur de distribution longitudinale de la charge pour la sollicitation
hertzienne . Ce dernier est prsent dans lannexe 13 pour les dentures
coniques ralises en aciers durcis superficiellement.
H
K
Usuellement on prend 2
min
=
F
S ;
FN
K - le facteur du nombre de cycles de fonctionnement pour une sollicitation au pied de
la dent (facteur de dure);
S
Y - le facteur de concentration de contrainte;
Fx
Y - le facteur dimensionnel ( facteur de forme).
Les facteurs
A
K , , , , , , seront choisis conformment aux
recommandations faites pour les engrenages cylindriques denture helicoidale.
V
K
K
F
K
FN
K
S
Y
Fx
Y
36
7.2.2. Verification de la resistance a la pression superficielle
(Verification au Pitting)
La pression de Hertz entre les flancs des dents se calcule pour le contact au centre
instantan de rotation C ( )
HC
.
7.2.2.1. Cas des engrenages cylindriques denture helicoidale
Pour un engrenage cylindrique denture helicoidale, on calcule leffort hertzien
maximal pour le contact en C ( centre instantan de rotation) avec la relation:
W R HN
H
H
Hp H V A
t
H M HC
Z Z K
S
K K K
u
u
d b
F
Z Z Z =
+
=
lim
1
1
1
(7.18)
o:
1
HC
Leffort unitaire hertzien maximal pour un contact au centre instantan de rotation
(point C) galement appel pression de Hertz de fonctionnement ;
M
Z Le facteur de matriau: E Z
M
35 , 0 =
o
2 1
2 1
2
E E
E E
E
+
= (7.19)
1
E et tant les modules dlasticit longitudinaux des deux roues. E
2
Dans le cas de deux roues dentes excutes en acier lamin, la valeur du facteur de
matriau est Z
M
271 N mm
2
.
Z
H
Le facteur du point de roulement. Il est donn par la relation:
t
w t
b
H
tg
Z
=
2
cos
cos
(7.20)
Il est prsent aussi dans le diagramme de lannexe 15.
Z
Le facteur de la longueur de contact (ou facteur de conduite). Il est prsent dans le
diagramme de lannexe 16 en fonction des composantes du degr de recouvrement (ou
rapport de conduite)
et
;
F
t
La force tangentielle au niveau du cercle primitif;
b La largeur de la denture de la roue mene;
d
1
Le diamtre primitif du pignon;
u Le rapport des nombres de dents. Pour des engrenages rducteurs, ;
2 1
= i u
K
A
Le facteur de la charge dynamique extrieure (ou facteur dapplication);
K
V
Le facteur dynamique interne (annexe 11);
K
H
Le facteur de distribution longitudinale de la charge (facteur de charge
longitudinale) (cf. annexe 12);
37
Hp
Leffort unitaire admissible pour la sollicitation la fatigue par pression de contact
galement appel pression de Hertz limite admissible.
H lim
La rsistance limite la fatigue par pression de contact. Elle dpend de la nature
du matriau de la roue dente et du traitement subi (v. tableau 4.1);
S
H
Le facteur de sret en rapport avec la destruction par pitting des flancs (ou facteur
de sret effectif). En pratique, S
H min
, = 125;
K
HN
le facteur du nombre de cycles de fonctionnement pour une sollicitation hertzienne
(facteur de dure). On prendra :
o K
HN
= 1 pour un nombre de cycles de fonctionnement N 5 10
7
;
o
( )
7
1 6 /
pour 10 5 10 K N
HN
= 5 10
3 7
< N ;
Z
R
le facteur de rugosit des flancs. Il est donn par la relation:
( )
Z R
R a
m
red
Z
R
= 3
100
o:
( )
R R R a 100
3
(
a a a
red100
1 2
3 = + R R
a a
1 2
, rugosits moyennes
arithmtiques des flancs des roues , 6 , 1 8 , 0 ,
1 2
=
a
R
a
R )
( ) m
Z H
R
= + 012 1000 5000 ,
lim
on prendra :
-
H lim
= 850
2
N / mm si la limite dendurance pour le matriau choisi est
infrieure 850 N/mm
2
-
H lim
= 1200
2
N / mm
N/ mm
si le matriau choisi a une limite dendurance
suprieure 1200 .
2
Pour des valeurs intermdiaires 850 1200 < <
Hlim
, on va travailler avec la
valeur de la limite dendurance du matriau.
Z
W
le facteur du rapport de duret des flancs. Si et reprsentent
respectivement les durets Brinell des flancs de la dent du pignon et de la roue, on
le choisira de la manire suivante :
HB
1
HB
2
Si , HB HB N/ mm
2
1 2
1000 > Z
W
= 12 ,
Si , Z
W
HB HB N/ mm
2
1 2
1000 = 1
38
7.2.2.2. Cas des engrenages coniques a denture droite
Pour un engrenage conique denture droite, on calcule leffort unitaire hertzien
maximal pour le contact au point C (centre instantan de rotation) pour lengrenage
cylindrique virtuel sur le cne frontal mdian en utilisant la relation (valable pour un
engrenage orthogonal ): = 90
o
W R HN
H
H
Hp H V A
m
t
Hv M
Z Z K
S
K K K
u
u
d b
F
Z Z
HC
lim
1
1
1
2
1
=
+
= (7.19)
o:
1
HC
leffort unitaire hertzien maximal pour le contact au centre instantan de rotation
(point C) galement appel pression de Hertz de fonctionnement ;
Z
M
le facteur de matriau;
Hv
Z le facteur du point de roulement pour un engrenage cylindrique virtuel. Il est choisi
dans lannexe 15. on considre Z
Hv
= 177 , pour les roues dentes sans dport.
F
t
la force tangentielle au niveau du diamtre primitif moyen;
1
b - la largeur du pignon;
d
m
1
Le diamtre du cercle primitif moyen;
u le rapport du nombre de dents
2 1
= i u ;
K
A
le facteur de la charge dynamique extrieure (ou facteur dapplication);
K
V
le facteur dynamique intrieur (ou interne) (annexe 11);
K
H
le facteur de distribution longitudinale de la charge (annexe 13);
Hp
leffort unitaire admissible pour une sollicitation la fatigue galement appel
pression de Hertz limite admissible;
H lim
la rsistance limite la fatigue. Elle dpend du matriau constitutif de la roue
dente et du traitement appliqu (tableau 4.1);
S
H
le facteur de sret en rapport avec la destruction par pitting des flancs. En pratique
on prend S
H
= 15 , ;
Les facteurs ont la mme dfinition que celle introduite au point
prcdent et seront choisis conformment aux recommandations faites pour les engrenages
cylindriques denture helicoidale
w R HN
Z Z K , ,
39
8. DIMENSIONEMENT DES ARBRES
La forme et les dimensions des deux arbres doit tre prcis ce stade. Elles seront
toutefois definitivement tablies aprs les tapes de vrification de la rsistence
(v.chapitres10,13).
Pour estimer le diametre de larbre sur lequel sera monte la roue mene il faut
suivre les etapes suivantes:
- on prend les valeurs normalises des bouts darbres ( relation 2.1 et annexe 2)
- on choisit la bague lvres correspondant chaque arbre cest dire D, le diamtre
extrieur et h la longueur : le diamtre de la bague lvres tel que :
II etI
d
,
=
II etI
d
, II I
d
,
) 10 8 ( + (voir lannexe 17) (8.1)
- on fixe le diamtre intrieur du roulement ( diamtre du tourrillon) comme :
=
II rI
d
, II etI
d
,
) 8 5 ( + (8.2)
Il faut galement que ce diamtre soit multiple de 5.
Les roulements sont choisis aux annexes 18 et 19 . On trouve le diamtre extrieur
D , la largeur , B, ainsi que les facteurs de charge dynamique et statique ( C et C
0
).
- Le diamtre dassemblage de la roue mene sera suprieur au diamtre intrieur du
roulement
rII
d
(8.3)
II rI assemblage
d d
,
= ) 10 8 ( +
- Le diamtre et la largeur du moyeu seront tablis aprs le calcul de la clavette de fixation
de la roue mene ( v.chapitre 9).
9. CHOIX ET VERIFICATION DES CLAVETTES
Lassemblage des roues dentes, des poulies de courroie et des accouplements sur
les arbres est ralis dhabitude laide des clavettes faces parallles. On utilise parfois
dautres types dassemblages (assemblages serrage propre, assemblages par cannelures,
assemblages par des clavettes faces inclines ou par serrage par cne).
Dhabitude les pignons ont des diamtres proches des diamtres des arbres de
manire les excuter dans un mme bloc que larbre. On choisit cette solution si le
40
diamtre de pied de la roue dente satisfait la condition
f
d ( )
a f
d d 5 , 1 ... 4 , 1 o est le
diamtre de larbre au voisinage de la roue dente.
a
d
Aprs avoir estim le diamtre de larbre dans la zone dassemblage par
clavette faces parallles, on choisit les dimensions
assemblage
d
h b de la section de la clavette dans
norme (lannexe 20). On dtermine ensuite la longueur de la clavette et on vrifie sa
rsistance pour des sollicitations en pression et en cisaillement:
s
a
a c
t
s
d l h
M
=
4
( ) (9.1)
2
N/mm 120 90 =
s
a
f
a
a
t
f
d l b
M
=
2
( ) (9.2)
2
N/mm 80 60 =
f
a
o est la longueur de contact de la clavette avec la rainure dans le moyeu. Elle est
fonction de la forme et de la longueurl de la clavette :
c
l
b l pour une clavette de type A (les deux ttes arrondies) l
c
=
2
b
l l
c
= pour une clavette de type C (une tte arrondie)
l l
c
= pour une clavette de type B (ttes droites).
Evidemment, la largeur du moyeu sera suffisamment grande pour pouvoir
permettre la ralisation du contact sur la longueur ( ). Si la longueur de contact
obtenue est plus grande que celle calcule prcdemment, on peut utiliser deux clavettes
faces parallles ou mme des cannelures pour ne pas surdimensionner le moyeu.
B
l
c
l
c B
l l
c
l
10. CALCUL DES REACTIONS. TRACE DES
SANTS
Pour pouvoir choisir les roulements et vrifier les dimensions des arbres, il faut
trouver
a. Raliser un schma du rducteu 21 et 22) en utilisant les lments
gomt
DIAGRAMMES DES MOMENTS FLECHIS
ET DES MOMENTS DE TORSION
les ractions sur les appuis et tracer les diagrammes de variation des moments
flchissants et des moments de torsion. Lopration est difficile car on ignore les distances
entre les appuis et les points dapplication des forces lors de lengrnement.
Les tapes parcourir sont les suivantes:
r (annexes
riques des roues dentes, en apprciant les distances entre les roues ainsi que celles
entre les roues et le carter, en estimant les largeurs des roulements et les distances
41
ncessaires pour la fixation des roulements. On tablira les distances entre les appuis et les
points dapplication des forces sur base de ce schma. Chaque arbre est considr comme
sappuyant la demi-largeur des roulements et les forces dans lengrnement sont
considres comme des forces concentres appliques la demi-largeur des roues.
b. Trac du schma de chargement et appui de chaque arbre. On va raliser les
schma
c. Calcul des ractions dans les appuis et trac des diagrammes des moments
flchiss
s de chargement et dappui de chaque arbre dans deux plans perpendiculaires
(horizontal et vertical) car les forces dans les engrenages ne sont pas coplanaires. Sur
larbre dentre, on considre que la force due la transmission par courroies trapzodales
est une force concentre applique la demi-largeur de la roue de courroie (en porte
faux).
ants. On va le raliser dans les deux plans perpendiculaires (horizontal et vertical).
Dans un appui quelconque (indic A), on a une raction normale dans le plan vertical
A
V
et une autre dans le plan horizontal
A
H . On obtient la raction rsultante (force radiale):
2 2
r
H V F + = .
A A A
La dtermination de la raction axiale dans les appuis dpend du type de roulement
utilis e
oments flchissants, on doit considrer les
forces
d. Trac des diagrammes de variation des moments de torsion. Celui-ci est fait
en cons
11. CHOIX ET VERIFICATION DES ROULEMENTS
On va choisir le type de roulement utilis pour lappui de chaque arbre, puis leur
grandeu
des arbres courts ) o est la
distanc
t du type du montage choisi .
Lors du trac des diagrammes des m
axiales dans les engrenages comme des forces parallles aux axes des arbres, mais
leur action est excentre par rapport aux axes des distances gales aux rayons primitifs
des roues respectives. Elles donnent donc des moments flchissants concentrs qui
dterminent des variations dans les diagrammes de moments flechissants.
idrant les chemins de transmission de la puissance sur chaque arbre.
r et enfin on va vrifier leur dure de vie.
Les arbres des rducteurs sont en gnral ( 10 / < d l
r consq
l
e entre les appuis et d est le diamtre moyen de larbre et, pa uent, ils ont
une rigidit en flexion leve. Donc les angles dinclinaison des lignes daction des forces
dans les appuis sont rduits, ce qui permet lutilisation des roulements radiaux billes et
42
des roulements axiaux-radiaux galets coniques (qui imposent des conditions restrictives
au regard de linclinaison dans les appuis). Dans la suite, on va discuter le choix et la
vrification des roulements radiaux billes et des roulements radiaux-axiaux galets
coniques.
A. Les roulements billes contact radial
Ils reprennent principalement des forces radiales, mais ils peuvent reprendre
galem
a) Le montage roulement menant et roulement libre est utilis spcialement
pour le
b) Le montage flottant des roulements suppose la fixation axiale de chaque
roulem
Les tapes successives dans le choix des roulements billes contact radial sont:
. Dtermination du type du montage : montage roulement menant et roulement libre ou
. Estimation du diamtre de larbre au droit du roulement en tenant compte des
conformment la relation:
ent des charges axiales. On peut utiliser deux types de montages (v. fig. 11.1):
s arbres longs. On choisit, en gnral, comme roulement menant le roulement dont
le chargement radial est le plus petit. Il est fix axialement, sur larbre et dans le carter,
dans les deux sens et va reprendre toute la charge axiale de larbre. Le roulement libre est
fix axialement dans les deux sens sur larbre. Il est laiss libre dans le carter pour
compenser les dilatations thermiques diffrentes en fonctionnement entre larbre et le
carter. Le roulement libre reprendra seulement la force radiale (raction normale rsultante
dans lappui concern), son chargement axial tant nul.
ent dans un seul sens sur larbre (vers lintrieur du rducteur) et en sens oppos
(vers lextrieur) dans le carter. On laisse dhabitude un jeu axial de 0,5 ... 1 mm pour
compenser les diffrences de dilatation entre larbre et le carter. Dans ce montage, la force
axiale est prise par le roulement vers lequel elle est oriente. Le montage flottant est utilis
pour les arbres courts; il est plus simple mais il peut conduire un dsquilibre accentu du
chargement des deux roulements (dans le cas o le roulement chargement radial serait le
plus grand, il reprendrait aussi la force axiale).
1
montage flottant,
2
dimensions des arbres tablies lors du dimensionnement prliminaire (cf. chap. 2). Pour
les arbres qui sortent lextrieur du rducteur (I et II), on a tabli le diamtre de tte des
arbres
II I
d
,
. On choisira pour ceux-ci les diamtres des tourillons au droit des roulements
43
L tourillons sur lesquels on fait le montage des roulements
e la condition:
dimensions du roulement billes (srie de diamtres et largeurs). Pour le diamtre estim
( ) mm 18 ... 12
,
II I,
+ =
II I rul
d d (11.1)
es diamtres choisis pour les
doivent satisfair
N ou 5
II I,
= k k d
rul
(11.3)
3. Slection dans les catalogues des roulements des constructeurs, pour chaque arbre, des
du tourillon, on trouve dans les catalogues plusieurs grandeurs de roulements billes
contact radial (sries de diamtres et largeurs 0, 2, 3 ou 4) qui, pour un mme diamtre
de lalsage de la bague intrieure( )
rul
d d = , ont des diamtres extrieurs (D) et des
largeurs (B) diffrentes. On va essayer, au dbut, de choisir un roulement des sries
moyennes (2 ou 3) et, en fonction de la dure de vie obtenue, on peut passer la srie
infrieure (0) ou suprieure (4).
annexe 18 prsente un extrait de la norme pour le choix des roulements radiaux billes. L
Celle-ci doit tre suprieure une dure de fonctionnement admissible qui, pour les
E ulent
onformment aux tapes suivantes :
- le diamtre du tourillon au droit du roulement (mm);
ation de larbre (tr / min);
ents (N) les ractions
ormal
due aux roues m
ssi
4. Vrification des roulements choisis en dterminant leur dure de vie
h
L (en heures) .
a
h
L
rducteurs, a une valeur comprise entre 12 000 heures et 20 000 heures.
n pratique, le choix et la vrification dun roulement billes contact radial se dro
c
a. Les donnes dentre
rul
d
n - la vitesse de rot
- le chargement radial des deux roulem :
1
r
F ,
r
F
2
n es dans les deux appuis;
- le chargement axial
a
F (N) force axiale rsultante ontes sur
larbre;
- la dure de vie admi ble 20000 ... 12000 =
a
h
L heures.
b choix du type de montage et ltablis . Le sement du chargement axial de chaque
ulement. Si le roulement 1 est menant
a a
F F =
1
et 0
2
=
a
F ro . Si le roulement 2 est menant
la force axiale e
chargem t radial l
0
1
=
a
F et
a a
F F =
2
. Si on a un montage flottant, on va faire le calcul pour la situation la
plus dsavantageuse pour laquelle toute st reprise par le roulement
en e plus grand;
44
c. On choisit un roulement billes contact radial dune srie moyenne (2 ou 3) pour le
diamtre de tourillon
rul
d d = et lannexe 18 nous donne la capacit de chargement
ynamique C (N) ou charge dynamique de base et la capacit de chargement statique d
0
C
(N) pour le roulement choisi.
d. On calcule
0
C
F
a
pour chaque roulement et on choisit e et Y (ventuellement par
terpolation linaire) dans le tableau de lannexe 18.
e. On calcule
in
r
F
F
a
pour chaque roulement ensuite, on dtermine la charge dynamique
quivalente:
- si e
F
F
a
on a
r
r
F P = (11.
- si
4)
e
F
F
r
a
> on a
a r
YF XF P + = .
o X =0,56 (le mme pour tous les roulements billes contact radial) et Y a la valeur
choisie prcdemment.
f. On calcule la dure de vie de chaque roulement: L (millions de rotations) et L
h
(en
heures) avec:
3
P
et
=
C
L ( en millions de rotations) (11.5)
60
10
6
=
n
L
L
h
( en heures) (11.6)
g. Si les deux roulements dun arbre vrifient la conditio le choix est correct
ent on peut essayer le choix d
lingalit est accentue); tandis que si
n L L
a
h h
(ventuellem un roulement de la srie infrieure si
a
h h
L L < pour le roulement essay, on slectionne
ou on ch
O amtre d
ce
et
un roulement billes contact radial dune srie suprieure oisit des roulements
radiaux-axiaux galets coniques.
n peut aussi essayer daugmenter le di u tourillon au droit du roulement, mais
tte solution est dsavantageuse, car elle implique une augmentation de lencombrement
du poids de larbre.
45
a
Roulement menant
Roulement libre
b
Fig. 11.1. Montages des rou ents billes contact radial
B. Les butes radiales - axiales galets coniques
lem
Les butes radiales - axiales galets coniques supportent des charges radiales ainsi
que des chemin de roulement dans les
agues. Ils ont, dimensions gales, une capacit de chargement et une dure de vie plus
charges axiales grce au contact entre les galets et le
b
46
grandes que les butes billes. On peut utiliser deux types de montages pour les butes
radiales axiales galets coniques (cf. fig.11.2).
a. montage en O
b. montage en X
a. Le montage en O est utilis dans le cas o la distance entre les butes est rduite (les
e cas, on ralise une augmentation de la
ression des deux butes par rapport la situation du montage
roues tant montes en porte faux). Dans c
distance entre les centres de p
en X . Ce type de montage est utilis pour lappui de larbre du pignon conique.
Le rglage du jeu dans les butes (au montage) afin de compenser les diffrences de
dilatation entre larbre et le carter en fonctionnement est ralis laide dun crou agissant
sur la bague intrieure de la bute.
b. Le montage en X est utilis pour des arbres plus longs, sur lesquels les roues sont
montes entre les paliers. Le rglage du jeu dans les butes est ralis laide des
couvercles qui fixent les bagues extrieures.
axiales
bute charge par des forces radiale
Les bagues radiales axiales galets coniques introduisent des forces
supplmentaires (intrieures)
s
a
F . Une telle s
r
F
introduit une force axiale supplmentaire gale :
Y
F
F
r
a
s
5 , 0 = (11.7)
o Y est le coefficient de la force axiale dans lexpression de la charge dynamique
quivalente. Il est slectionn pour chaque bute dans les catalogues des constructeurs (cf.
annexe 19).
Trois forces axiales agissent usuellement sur un arbre appuy sur deux butes galets
coniques (monts en
O ou en
X ), ce sont:
- la force axiale
a
K provenant du fonctionnement des diffrents lments de
nt
machines monts sur les arbres (roues dentes, accouplements, etc.),
- les forces axiales supplme aires
2
s
Fa
1
s
Fa et des deux butes. Les deux forces
Pour le choix et la vrification des butes r es
nces
suiva
supplmentaires introduites par les butes sont calcules en utilisant la relation
(11.7). Leur sens dpend du type du montage (v.fig.11.2).
adial axiales galets coniques, il est
saire de dterminer le chargement axial de chaque bute. On applique lalgorithme
nt:
a
R de toutes les forces axiales sur larbre: - on dtermine le sens de la rsultante
2 1
s s
a a a a
F F K R + + = ;
47
- la bute qui porte des charges axiales ayant le sens de la rsultante est considre comme
charge avec la somme (vectorielle) de la force axiale
a
K et de la force axiale
supplmentaire de lautre bute;
- la deuxime bute est considre (conventionnellement) comme charge avec sa propre
hoix et la vrification des butes radiales axiales galets
pe du montage (en et
force axiale supplmentaire.
Les tapes parcourues pour le c
coniques sont:
a. Choisir le ty
O X ) ;
. Etablir le diamtre du tourillon au contact avec les butes en conformit avec les
. Pour le diamtre du tourillon tabli au point b, on choisit une bute radiale axiale
. Calculer les charges axiales supplmentaires introduites par les deux butes
. Appliquer lalgorithme permettant de dterminer le chargement axial de chaque bute ;
. Calculer la charge dynamique quivalente P;
b
lements prciss pour les butes radiales billes;
c
galets coniques dune srie moyenne de diamtres et largeurs, en utilisant les catalogues
des constructeurs. Lannexe 19 prsente un extrait de la norme se rfrant aux butes aux
galets coniques. Une fois la bute choisie, on dtermine les coefficients e et Y.
d
conformment la relation (11.7) ;
e
Calculer le rapport pour chaque bute; f.
r a
F F /
g
- si e
F
a
alors
F
r
r
F P = ,
e
F
F
r
a
> avec 4 , 0 = X alors
a r
YF XF P + = - si (mmes pour les butes galets
coniques), et Y est indiqu dans les catalogues pour chaque bute.
. Calculer la dure de vie des deux butes (en millions de rotations) avec la relation: h
3 / 10
=
C
L (en millions de rotations) (11.8
P
)
Calculer la dure de vie des deux butes (en heures) avec la relation :
o C est la capacit de chargement dynamique de la bute ou charge dynamique de base;
i.
48
60
10
6
=
n
L
L
h
(heures) (11.9)
j. Si la condition est vrifie pour les deux butes de larbre, le choix est correct.
On peut ventuellement essayer de choisir une bute de dimensions infrieures si
lingalit est accentue. Tandis que si
a
h h
L L
a
h h
L L < ,on choisit une bute galets coniques
ayant des dimensions suprieures.
K
F
as
F
rez
1
F
r
F
as
F
rez
1
F
r
a.
49
F
as1 F
as2
K
a
b.
Fig. 11.2. Montages des butes radiales axiales galets coniques
K
a
F
as1
F
rez1
F
r1
F
as1
F
rez1
F
as1
K F
as2 a
12. CHOIX ET VERIFICATION DES ACCOUPLEMENTS
On va prsenter le choix des accouplements lastiques boulons et flasques.
12.1. ACCOUPLEMENT ELASTIQUE A BOULONS (Annexe 3)
Il assure la transmission lastique du moment de torsion (attnuation des chocs) en
intercalant sur le trajet de la puissance transmise des douilles en caoutchouc.
La grandeur de laccouplement est choisie en fonction du moment de torsion
nominal ( ) conformment la condition:
n
t
M
n c
t t s t
M M C M =
II
(12.1)
o:
c
t
M est le moment de torsion de calcul;
II
t
M est le moment de torsion de larbre de sortie du rducteur (sur lequel se trouve
laccouplement);
s
C - coefficient de scurit dpendant de la nature du moteur, de la machine de travail et
du rgime de fonctionnement. Dans le cas dune transmission dutilisation gnrale,
on peut prendre . 1 =
s
C
Pour chaque grandeur daccouplement, la norme fournit certaines valeurs du
diamtre du bout darbre sur lequel on fait le montage de laccouplement. Si le diamtre de
la tte de larbre II (sur lequel se trouve laccouplement) choisi au point 2 est infrieur
celui ncessaire, on utilisera des demi-accouplements de type P. Un demi-accouplement P
est livr avec les trous dj faits un diamtre rduit, diamtre qui peut tre agrandi la
valeur .
d
0
d
On doit vrifier la rsistance de la tte de larbre ainsi que la rsistance de la
clavette faces parallle qui ralise lassemblage de laccouplement avec larbre.
Un accouplement boulons est excut de deux manires:
- type N accouplement normal;
- type B accouplement douilles dcartement.
De mme, on doit mentionner que dans la composition de laccouplement on peut
avoir des demi-accouplements de mme type ou de types diffrents.
Exemple pour la notation dun accouplement lastique boulons:
CEB 7N P63/K71 OT 60-3 accouplement lastique boulons de grandeur 7, type N,
compos dun demi-accouplement type P diamtre dalsage 63 mm et dun autre demi-
accouplement de type K diamtre dalsage 71 mm. Ces deux demi-accouplements sont
excuts en acier OT 60-3.
50
12.2. ACCOUPLEMENTS A FLASQUES (Annexe 4)
Ils ralisent la transmission rigide du moment de torsion (nattnuent pas les
chocs). Les vis qui fixent les flasques peuvent tre montes avec ou sans jeu (ajustes)
dans les trous des flasques. Pour viter lapparition des sollicitations supplmentaires, on
peut avoir un systme de centrage sous la forme de seuil de centrage ou dun anneau de
centrage.
Les accouplements flasques sont excuts selon deux variantes constructives:
- type CFO pour laccouplement des arbres horizontaux;
- type CFV pour laccouplement des arbres verticaux.
La grandeur dun accouplement est choisie en fonction du moment de torsion nominal
que laccouplement peut transmettre conformment la condition:
n
t
M
n c
t t s t
M M C M =
II
(12.2)
o:
c
t
M est le moment de torsion de calcul;
II
t
M est le moment de torsion larbre de sortie du rducteur (II) sur lequel se trouve
laccouplement;
s
C est le coefficient de scurit. Il dpend de la nature du moteur, des conditions de travail
et du rgime de fonctionnement. Dans le cas dune transmission dutilisation
gnrale, on peut prendre 1 =
s
C .
Exemple pour la notation dun accouplement flasques:
CFO 6-35 accouplement flasques pour les arbres horizontaux, de grandeur 6, de
diamtre nominal de bout darbre valant 35 mm.
On recommande la vrification des vis dun accouplement pour une sollicitation compose
(traction et torsion) pour les vis montes avec jeu et pour le cisaillement pour les vis
ajustes.
A. Cas des vis montes avec jeu
Le moment de torsion est transmis par le frottement entre les flasques qui sont presses par
les forces crees dans les vis au montage. La force axiale qui nat dans une vis par le
serrage de lcrou au montage est:
s
i
s
t
a
i K
M
F
c
=
2
(12.3)
o : K est le diamtre du cercle sur lequel on fait le montage des vis;
est le coefficient de frottement entre les flasques ( 2 , 0 ... 15 , 0 );
est le nombre de vis.
s
i
La tige de la vis est sollicite en:
- traction:
2
1
4
d
F
a
t
s
= (12.4)
51
o: est le diamtre intrieur du filet.
1
d
- torsion ( moment du serrage de lcrou par la cl lors du montage):
( )
16
2
3
1
2
2
d
tg
d
F
W
M
a
s
ts
t
s
+
= = (12.5)
o:
s
t
M - Le moment de torsion qui apparat dans la vis au serrage de lcrou;
s
W - Le module de rsistance polaire de la section de la vis;
2 1
,d d - respectivement le diamtre intrieur et le diamtre moyen du filet;
2
- Langle dhelice du filetage;
) / (
2 2
d p arctg = avec p - le pas du filet;
- Langle de frottement apparent entre les filets de la vis et de lcrou;
) pour le filet mtrique ) 30 cos / (
o
arctg =
avec tant le coefficient de frottement ( 15 , 0 ..... 1 , 0 = ).
Les deux efforts unitaires sont composs. Daprs la thorie de la rsistance des matriaux,
on obtient leffort unitaire quivalent:
2 2
4
s s
s t t
ech
+ = (12.6)
qui doit vrifier la condition:
(12.7)
2
/ 120 ..... 90 mm N
t s
a ech
=
B. Cas des vis ajustes.
La tige de la vis est soumise au cisaillement sous laction dune force tangentielle
provenant du moment de torsion transmis. Son expression est:
t
F
2
2
3
/ 80 ..... 60
4
2
mm N
d
i K
M
A
F
af
s
tc
s
t
f
s
=
= =
(12.8)
o: est laire transversale de la vis ajuste (section);
s
A
est le diamtre du trou de montage de la vis ajust (v. annexe 4).
3
d
52
13. VERIFICATION DES ARBRES
Aprs avoir dtermin la gomtrie et les dimensions des diffrents tronons de
larbre, on vrifie les aspects suivants:
a) la rsistance la fatigue en flexion de larbre,
b) la rsistance une sollicitation compose (flexion et torsion),
c) les dformations en flexion et en torsion,
d) la rsistance aux vibrations (calcul des vitesses critiques).
On dtaillera uniquement la premire de ces vrifications, savoir la vrification de la
rsistance la fatigue en flexion.
a. Vrification de la rsistance la fatigue en flexion des arbres
Elle est ralise dans les sections des arbres qui prsentent des concentrations de
contraintes (rainures de clavette, variations de sections, dgagements, filets etc.).
Considrons le cas gnral o dans une section concentration de contraintes on a
autant defforts unitaires de flexion que de torsion variables dans le temps.
On parcourra les tapes suivantes:
- On calcule les grandeurs caractristiques dune sollicitation en flexion variable.
Le moment flchissant dans une section quelconque est constant dans le temps car leffort
de flexion dans une fibre quelconque varie daprs un cycle altern symtrique cause de
la rotation de larbre.
On peut donc crire:
z
H
i
v
i
z
rez
i
W
M M
W
M
2 2
max
+
= = (13.1)
max min
= (13.2)
o: reprsentent respectivement le moment flchissant en plan vertical,
le moment flchissant en plan horizontal et le moment flchissant rsultant dans la section
considre (voir calculs du chapitre 10 appliqus la section considere).
irez iH iv
M M M , ,
De mme, on peut calculer:
53
max
min max min max
2
; 0
2
= =
+
=
v m
(13.3)
o:
m
est leffort unitaire moyen et
v
est lamplitude de la sollicitation.
- On calcule le coefficient de scurit par rapport la fatigue pour la sollicitation de
flexion en utilisant la relation de Soderberg ou celle de Serensen:
c
m v
k
c
=
1
1
(13.4)
1 1
1
+
m v
k
c (13.5)
o:
k
- Le coefficient de concentration des contraintes. Il dpend de la nature et de la
gomtrie locale (annexe 24)
- Le coefficient de dimensions (annexe 25)
- Le coefficient dtat de surface (annexe 26)
1
- La rsistance la fatigue du matriau constitutif de larbre pour une sollicitation en
flexion variable selon un cycle alternant symtrique (annexe 27)
c
- La limite dlasticit du matriau de larbre (annexe 27)
- Le coefficient est donn par la relation:
0
0 1
2
=
(13.6)
Lannexe 27 prsente les caractristiques mcaniques de quelques aciers frquemment
utiliss lors de la construction des machines.
- On calcule pour la section considre les lments caractristiques dune
sollicitation en torsion variable. Dans la plupart des cas, la sollicitation en torsion des
arbres est variable daprs un cycle de type pulsateur. Dans ce cas:
0 ;
min max
= =
p
t
W
M
(13.7)
et donc:
p
t
m
W
M
2 2
1
2
max
min max
= =
+
=
(13.8)
p
t
v
W
M
2 2
1
2
max
min max
= =
=
- On calcule le coefficient de scurit la fatigue pour la sollicitation de torsion en
utilisant la relation de Soderberg (13.9) ou Serensen (13.10):
c
m v
k
c
=
1
1
(13.9)
54
1 1
1
+
m v
k
c (13.10)
o les coefficients
k
,
et ont des dfinitions analogues celle de leur homologues
dfinis pour la flexion. Ils sont prsents dans les annexes 24, 25, 26. Les valeurs des
caractristiques du matriau
c
,
1
sont choisies dans lannexe 27.
0
0 1
2
=
(13.11)
- On calcule le coefficient de scurit la fatigue global pour la section considre:
a
c
c c
c c
c
+
=
2 2
(13.12)
o est le coefficient de scurit admissible :
a
c
- si les sollicitations et les conditions de fonctionnement sont connues
avec prcision,
5 , 1 ... 3 , 1 =
a
c
- dans le cas inverse. 5 , 2 ... 5 , 1 =
a
c
b. Vrification de la rsistance la sollicitation compose (flexion et torsion)
La vrification est faite pour les sections o le moment quivalent est maximal ou
pour celles dont laire est diminue cause des variations brutales de diamtre. Dans une
telle section, on calcule:
- Le moment flchissant rsultant est
2 2
iH iV
i
M M M
rez
+ = (13.13)
o et reprsentent respectivement le moment flchissant dans la section
considre en plan vertical et celui en plan horizontal;
iV
M
iH
M
- Le moment quivalent (rduit) dans la section considre:
( )
2 2
ech t
i
M M M
rez
+ = (13.14)
o est un coefficient qui tient compte des diffrents modes de variation dans le temps
des efforts de flexion et de torsion (cf. tableau 13.1).
Tableau 13.1- Coefficient
Nature de la variation
de leffort de flexion
Nature de la variation de
leffort de torsion
Valeur du coefficient
Constant I
I III
ai ai
=
alternant symtrique Pulsateur II
II III
ai ai
=
Alternant symtrique III
1
III III
= =
ai ai
55
Les efforts admissibles en flexion pour la sollicitation constante( )
I
ai
, de type pulsateur
( )
II
ai
ou alterne symtrique ( )
III
ai
sont prsents dans lannexe 28.
- La vrification la sollicitation compose est faite avec la condition:
III
ech
ech ai
z
W
M
= (13.15)
14. CHOIX DU LUBRIFIANT ET DU SYSTEME DE
GRAISSAGE DES ENGRENAGES
Le choix du lubrifiant pour les engrenages est ralis en tenant compte des
paramtres cinmatiques, des paramtres de chargement des engrenages, du type
dengrenages et des caractristiques des matriaux constitutifs.
Un paramtre important dans le choix du type de lubrifiant est la vitesse
priphrique des roues dentes qui a la valeur suivante au niveau du cercle primitif:
60000
1 I w
n d
v
(14.1) ( s m/ )
o:
1 w
d est le diamtre du cercle primitif du pignon (en mm),
I
n est la vitesse du pignon (en tr/min).
On peut faire les recommandations suivantes au sujet du type du lubrifiant utilis. Il
dpend de la vitesse priphrique des roues dentes :
- pour ( ==> graphite ou bisulfure de molybdne; ) s m v / 4 , 0 ... 0 =
- pour ( ) s m v / 8 , 0 ... 0 = ==>graisse;
- pour ( ==>graisse ou huile ) s m v / 4 ... 8 , 0 =
- pour ==>huiles minrales ou synthtiques, additives ou non additives. s m v / 4 f
Lorsquon utilise de lhuile comme lubrifiant pour les engrenages cylindriques et coniques,
on peut dterminer sa viscosit cinmatique en utilisant le diagramme de lannexe 29.
En abscisse, on a le facteur de chargement vitesse (en MPa/m) v k
s
/
s
k est la pression Stribeck donne par la relation:
2 2
1
1
Z Z
u
u
bd
F
k
H
t
s
+
= ( en MPa) (14.2)
o v est la vitesse tangentielle des roues au niveau des cercles primitifs (en m/s).
La viscosit tablie avec le diagramme de lannexe 29 permet de choisir lhuile
adquate sur tableau de lannexe 31 reprenant diverses huiles utilises pour des
transmissions industrielles.
56
Le choix du systme de graissage, cest--dire la manire dapporter le lubrifiant
dans la zone dengrnement, est fait en fonction du type et de la gomtrie des roues ainsi
que de leur vitesse priphrique.
a. Le graissage par immersion (barbotage) est utilis pour des vitesses infrieures
12 m/s. Pour un graissage efficace, la roue doit pntrer dans lhuile. La profondeur
dimmersion vaut au minimum un module et au maximum six modules pour ltage le plus
rapide ; elle vaut un tiers du diamtre de la roue ou 100 mm pour ltage le plus lent.
Dans le cas dun engrenage conique, la dent doit pntrer dans lhuile sur toute sa largeur.
La quantit dhuile sera prise gale ( ) 7 , 0 ... 35 , 0 litres pour chaque kW transmis et
lintervalle de changement de lhuile est usuellement( ) 3000 ... 2500 heures de
fonctionnement.
b. Le graissage par circulation force dhuile est utilis pour des vitesses
infrieures 20 m/s . On pulvrise lhuile laide de gicleurs dirigs vers la zone
dengrnement. Pour des vitesses suprieures 20 m/s, on utilise plutt des gicleurs placs
avant la zone dengrnement. Lintervalle de re-circulation de lhuile est situ entre 0,5 et
2,5 minutes dans le cas du pompage de lhuile du bain. Il varie de 4 30 minutes lorsquon
utilise un circuit extrieur.
57
15. ELEMENTS ENERGETIQUES DES
REDUCTEURS A ROUES DENTEES
15.1. CALCUL DU RENDEMENT TOTAL DU REDUCTEUR
La puissance la sortie du rducteur est plus petite que celle lentre,
II
P P
I
,
cause des frottements lors de lengrnement, des frottements dans les roulements et des
frottements dus lentranement de lhuile dans le bain. La diffrence de puissance
correspond la puissance perdue : P
p
u l a II I p
P P P P P P + + = = (15.1)
o:
- est la puissance perdue par frottement lors des engrnements; P
a
- est la puissance perdue dans les paliers ( roulements); P
l
- est la puissance perdue par agitation de lhuile (barbotage). P
u
Le rendement total dun rducteur un tage est donn par la relation:
12 12
2
u r a
I
II
R
P
P
= = (15.2)
o:
12
a
est le rendement de lengrenage form par les roues 1 et 2
r
est le rendement dune paire de roulements;
12
u
est le rendement d aux pertes par barbotage de lhuile par lengrenage 1-2.
a. Rendement des engrenages
a
Pendant engrnement il y a des pertes dnergie dorigines multiples : les
frottements par glissement, les frottements de roulement, la compression de lair et de
lhuile entre les dents etc.
La perte la plus importante est celle due aux frottements par glissement des
flancs des dents en contact. La relation pour le calcul du rendement des engrenages
cylindriques et coniques, en tenant compte des pertes par frottement par glissement est :
a
f z z
= +
1
1 1
1 2
cos
(15.3)
o:
- Le coefficient de frottement de glissement entre les flancs,
58
=0,04 0,08 pour des roues ralises en aciers durcis superficiellement et
rectifis;
=0,06 0,10 pour des roues ralises en aciers durcis superficiellement,
=0,09 0,12 pour des roues fraises en aciers durcis superficiellement,
=0,09 0,14 pour des roues en aciers amliors ou normaliss.
- le degr de recouvrement de lengrenage (ou rapport de conduite apparent);
-langle dinclinaison de la denture;
f coefficient gal 2 pour les engrenages denture droite ou denture droite
incline en priode de rodage. f =5 pour les engrenages cylindriques denture incline
rode; f =2-3 pour les engrenages travaillant grande vitesse ( ). v 15m/ s
b. Rendement des roulements
Pour une paire de roulements , le rendement vaut:
-
l
= 0995 , pour les roulements billes;
-
l
= 099 , - pour les roulements galets.
c. Rendement d aux pertes par barbotage,
u
Le rendement d aux pertes par barbotage se calcule sparment pour chaque roue
dente qui entre dans lhuile du bain via la relation :
P
bhv
P
P
I
u
u
= =
4
2 / 3
10 3 , 1
1 1 (15.4)
o:
b La largeur de la roue dente, en mm
h La profondeur dimmersion dans lhuile, en mm
v La vitesse priphrique de la roue, en m/s
P La puissance transmise par la roue considre, en kW
Pour le graissage jet dhuile, 1 =
u
.
15.2. CALCUL DE LA TEMPERATURE DE FONCTIONNEMENT DU
REDUCTEUR
On peut calculer la temprature du rducteur pendant le fonctionnement en
utilisant lquation dquilibre thermique. La chaleur produite par frottement est
dissipe vers lextrieur par le carter du rducteur (par convection et par rayonnement).
59
Lquation de bilan thermique du rducteur scrit:
P P
p c
=
o :
P
p
- La puissance perdue, en kW
- La puissance vacue par le carter. P
c
En remplaant les puissances par leur expression, cette quation devient:
( )
(
0
1
t t KS
P
R
R
II
=
) (15.5)
o:
- est la puissance la sortie du rducteur, en kW;
II
P
-
R
est le rendement total du rducteur;
- K est le coefficient global dchange de chaleur entre le carter et lenvironnement,
kW/(m
2
C ). Usuellement, dans le cas du refroidissement naturel, on considre K =
0,012...0,018 kW/(m
2
C) pour des vitesses dcoulement de lair autour du rducteur
comprises entre 0 et 1,5 m/s.
- S est la surface du carter refroidie lair (en m
2
). On rajoute cette valeur :
la moiti de la surface des nervures dans le cas dun carter nervures,
la surface de la base du rducteur dans le cas du montage du rducteur sur une
fondation mtallique ou dans le cas dun rducteur suspendu sur un cadre.
- t est la temprature de lenvironnement (usuellement t =20C).
0 0
On dduit la temprature de fonctionnement du rducteur t de lquation 15.5. Elle ne
doit pas excder une valeur admissible (usuellement 80C - 90C).
Une baisse apprciable de la viscosit de lhuile apparat des tempratures leves, et
on observe galement une modification des jeux dans les roulements et les engrenages.
On peut agir de diffrentes manires lorsque la temprature de fonctionnement du
rducteur calcule est suprieure la valeur limite t =80C - 90C:
- agrandir la surface du carter par la cration des nervures;
- raliser un refroidissement forc du carter par un ventilateur mont sur larbre
dentre (accroissement du coefficient global dchange de chaleur, K);
- utiliser un circuit de refroidissement en serpentin parcouru par leau de
refroidissement dans le bain dhuile;
- raliser le graissage via un circuit extrieur et un refroidisseur dhuile.
60
16. ELEMENTS CONSTITUTIFS DES REDUCTEURS
DE TOURS A ROUES DENTEES CYLINDRIQUES
ET CONIQUES
Les rducteurs roues dentes sont raliss comme des ensembles indpendants
composs de mcanismes ferms dans des carters tanches. Les domaines dutilisation
multiples ont men une grande varit ainsi qu la ralisation de rducteurs pour une
large gamme de puissance, de rapports de transmission, de positions relatives des arbres
dentre et de sortie, de positions de fixation sur la machine entrane et de positions de
la fondation.
16.1. CONSTRUCTION DES ROUES DENTEES CYLINDRIQUES
ET CONIQUES
Il existe une grande varit de formes de roues dentes. Le choix de la forme des
roues dentes est une des element importants lors de la ralisation des rducteurs. Il y a
la base le critre conomique (dun emploi rduit de matire et de main duvre),
mais il est influenc dune manire apprciable par la ncessit de remplir le rle
fonctionnel. Lingnieur doit considrer les dimensions des roues, la technologie de
ralisation du produit semi-fini, la technologie du traitement thermique appliqu ainsi
que celle de la fabrication en srie.
a.
b.
Fig. 16.1. a, b Arbre pignon cylindrique
61
Les roues dentes cylindriques de diamtre petit ( h d d
a
6 + < , o d est le diamtre de
larbre et h la hauteur de la dent) se ralisent en une seule pice avec larbre sous forme
darbre pignon comme indiqu la figure 16.1 a,b.
a.
b.
Fig. 16.2. Forme constructives de pignons coniques (arbre/pignon)(a) ou independente (b)
Le tableau 16.1 prsente la corrlation entre les dimensions de la roue, sa construction et
le traitement thermique appliqu pour les roues dentes cylindriques.
Tableau 16.1: Construction des roues dentes diverses dimensions
Diamtre de la
roue(mm)
Construction de la roue Traitement thermique de la denture
1 2 3
Jusqu 200
Disque dpaisseur uniforme
(coup dune barre ou forg
librement)
Amlioration
Jusqu 500
Disque moul
Amlioration
Durcissement (trempe, cmentation,
nitruration)
62
Tableau 16.1 (cont.)
1 2 3
200-1000 Anneau frett sur le moyeu
coul un seul disque
Amlioration
1000-2000 Anneau frett sur le moyeu
coul deux disques
Amlioration
300-2500
Construction soude
Amlioration
Trempe superficielle
Nitruration dure
Jusqu 1500 Disque dpaisseur uniforme
(forg dans une presse)
Cmentation - Trempe
2000-8000 Demi-anneaux ou segments
couls, joints mcaniquement
_
Fig. 16.3. Formes de roues dentes cylindriques
63
b La largeur de la roue
d Le diamtre de lalsage de la roue (identique au diamtre de larbre)
a
d Le diamtre de tte de la roue
( )
m f
m s
s c
d D
d L
R
B
B
5 , 0
7
2 5 , 2
2 , 1
10 5 , 1
5 , 1 8 , 0
6
0
=
c peut tre choisi quand bien mme il rsulte du raccord correspondant
R dpend des dimensions de la roue.
c
L
d
B
B
1
2
d
D
c
L
d
c
L
s
c
L
g
B
B
1
B
1
B
1...2
B
B
a
2 2
d
D
d d
D
d
d
D
Fig. 16.4. Roues dentes coniques
Les roues dentes de diamtres grandes ( h d d
a
6 + >
1
o
2
) se
ralisent sous forme de pices spares fixes sur larbre avec des clavettes faces
d d
a
8 , 1 >
64
parallles, par cannelures ou par frettage. La fig.16.3 prsente diffrentes constructions
de ces roues. On y retrouve leurs principaux lments gomtriques. Le moyeu peut
avoir la mme largeur que la denture ou il peut tre plus large. La croissance de la
largeur du moyeu impose par la longueur de contact avec la clavette faces parallle
peut tre ralise symtriquement ou asymtriquement. Les mmes considrations sont
valables pour les roues dentes coniques.
Un tableau contenant les dimensions standardises des paramtres de la denture
doit figurer sur le dessin dexcution des roues dentes.
Tableau 16.2: Paramtres de la denture des roues dentes cylindriques
Module normal
n
m Module frontale
exterieur
m
Nombre de dents z Nombre des dents z
Angle dinclinaison de
division
Profil de rfrence
0 0
c h
a n
Sens de linclinaison
de la dent
_ Deplacement
specifique radiale
x
r
Profil de rfrence
0 0
c h
a n
Deplacement
specifique tangentielle
x
t
Coefficient du
dplacement du profil
(dport)
x
Echelle de precision
Marge de prcision et
jeu
_ Angle entre les axes
Longueur aprs N
dents
N
W Diamtre primitif sur le
cne frontal extrieur
d
Diamtre primitf d s
Hauteur de la dent h nlimea la coard
a
h
Roue Nombre
de dents
z Angle primitif
Conjugue Nombre
du dessin
_ le demi-angle au
sommet du cne de tte
a
A B le demi-angle au
sommet du cne de
pied
f
la longueur extrieure
de la gnratrice du
cne primitif
R
Roue Nombre
de dents
z
Conjugue Nombre
du dessin
_
A B
65
Remarque:
La largeur du tableau sera de 110-120 mm et la hauteur dune ligne vaudra 7-10
mm. Les largeurs des colonnes A et B valent respectivement 10 mm et 30-45 mm.
Les marges de tolrance des roues dentes et de lengrenage, la grandeur du jeu
entre les flancs des dents et la rugosit des surfaces actives des flancs sont normalises .
16.2. CONSTRUCTION DES CARTERS
Le carter du rducteur fixe la position relative des arbres et implicitement celle
des roues dentes. Donc pour assurer un meilleur engrnement, on a besoin dune bonne
rigidit du carter. Le carter est ralis en deux morceaux afin de monter facilement les
arbres, les roues et les roulements: le carter infrieur et le carter suprieur.
Usuellement, les carters des rducteurs sont couls en fonte (Fc 150, Fc 250 en
norme ) et plus rarement en acier (OT 45, OT 55 en norme ). Dans le cas dun prototype
unique ou dans le cas de la production de petite srie, on peut raliser un carter soud en
tles dacier (OL37, OL42 ou OL44 en norme ).
On doit respecter les conditions imposes par la technologie de la fonderie et par
lconomie dusinage dans le cas des carters raliss par coule (cf. annexe 33 et 34).
Elles portent sur:
- la ralisation des parois dpaisseur uniforme tout en vitant les
agglomrations de matriau. On recommande lutilisation des nervures pour accrotre la
rsistance et la rigidit;
- lassurance dune paisseur minimale des parois impose par la technologie de
fonderie et par la nature du matriau du carter;
- le passage graduel dune paroi fine une paroi paisse pour diminuer les
tensions rmanentes aprs la coule;
- lassurance de rayons de raccord suffisamment grands et la ralisation des
inclinaisons des parois (pour lextraction facile des noyaux de coule);
- la limitation des surfaces usines par enlvement de copeaux au minimum
ncessaire requis par la ralisation des surlvations (bossages) ou valles (lamages)
pour les surfaces dappui des crous, des vis, des couvercles, etc.
Lannexe 33 prsente la construction dun carter coul pour un rducteur
engrenages de grande portance (ralis en acier durci HB > 3500 N/mm
2
). Dans ce cas,
le carter infrieur a les parois verticales dcales par rapport celles du carter suprieur
afin daugmenter le bain dhuile: le carter infrieur a des parois lextrieur, tandis que
le carter suprieur les a lintrieur. La rigidification du carter suprieur se fait par les
poches de rcolte de lhuile pour le graissage des roulements. Pour le carter infrieur, on
utilise des nervures intrieures.
66
La fixation des deux carters est ralise par lintermdiaire dassemblages filets
(cf. Les annexes 35,36,39,40,41,42 ,46). Dans le cas des carters parois alignes, on
utilise des ensembles de vis et dcrou et dans le cas des carters parois dcales (cf.
annexe 46), le rle dcrou est jou par le trou filet dans le carter infrieur.
Pour rigidifier les zones de carter dans la proximit des roulements, on augmente dans
cette zone lpaisseur du carter .
On utilise deux goupilles de centrage pour positionner plus prcisment les
carters (cf. annexe 39).
Le carter infrieur est prvu avec:
- un orifice ferm par un bouchon filet pour vacuer lhuile (lannexe 38). Cet orifice
doit tre plac sur la paroi latrale, rasant la partie infrieure du bain dhuile. On
ralise parfois une petite inclinaison (1:100) de cette partie vers lorifice pour
permettre lcoulement de toute la quantit dhuile ;
- deux parois latrales pour fixer le rducteur. On y prvoit des trous pour les vis de
fixation;
Le carter suprieur est prvu avec:
- un orifice de visite (obtur avec un couvercle dtachable) dimensionn et plac de
telle manire quil permet lobservation de la denture de toutes les roues du
rducteur;
- un orifice filet pour le bouchon daration qui maintient la pression lintrieur
du carter la valeur de la pression atmosphrique (les surpressions empchant
ltanchit lannexe 45);
- un orifice pour la tige de contrle du niveau de lhuile (jauge);
- des orifices filets pour la fixation de deux anneaux ncessaires au dplacement du
rducteur (si les lments sur le carter infrieur ne sont pas prvus ou si le
rducteur un gabarit et/ou poids lev, v.lannexe 32)
La hauteur du carter infrieur est choisie en fonction du diamtre de tte de la
plus grande roue et en tenant compte de la profondeur dimmersion dans lhuile ainsi
que du volume du bain ncessaire (0,30,6 l/kW). On va considrer aussi le fait que la
distance entre la surface dappui du carter et laxe des arbres doit avoir une valeur
normalise ( cf. annexe 32).
Dans le cas de rducteurs coniques, le pignon conique est mont en porte faux.
Son arbre est gnralement appuy sur deux roulements galets conques monts en O.
Tout cet ensemble de larbre pignon conique est plac dans une cassette permettant le
rglage du jeu entre les flancs des dents des roues coniques lors du montage (v. l
annexe 42 )
Lannexe 23 prsentent des recommandations concernant la construction des
couvercles pour ltanchit des alsages sur lesquels sont monts les roulements et qui
67
68
fixent les bagues extrieures de ceux-ci dans le sens axial. Ils peuvent tre couls ou
forgs librement ou encore mouls ou encore usins par enlvement de copeaux.
On utilise gnralement des bagues lvres standardiss pour assurer
ltanchit des arbres dentre et de sortie du rducteur. Elles sont choisis en fonction
du diamtre de larbre au niveau de ltancheit lannexe 17.
Les dessins dexcution de larbre utilisent des lments normalises suivants :
- les circlips (annexe 43)
- les dgagements ( annexe 48)
- les rayons de racordement (annexe 47)
- les tolerances gnerales ( annexes 49,50,51)
- les trous de centrage (annexe 52)
Un exemple de dessin dexcution est donn a lannexe 53.
Un exemple de dessin dexcution darbre - pignon est donn a lannexe 54.
Les dessins dexecution de la roue utilisant les elements suivants :
Les tolerances gnerales ( annexe 49,50,51)
Les paramtres gometriques ( v. tableau 16.2)
Des exemples des dessins dexcution des roues coniques sont donnes aux
annexes 55, 56 et pour une roue cylindrique lannexe 57.
Un exemple de dessin densemble dun rducteur a roues dentes cylindriques
est donn lannexe 58.
Un exemple de dessin densemble dun rducteur a roues dentes coniques est
donn a l annexe 59.
Un dessin de lensemble de la transmission mcanique ( rducteur, poulie,
courroie, moteur) est donn aux annexes 60 ( rducteur cylindrique ) et annexe
61 ( rducteur coniques)
BIBLIOGRAPHIE
1. Buzdugan Gh. Rezistena Materialelor, Editura Tehnic, Bucureti, 1974.
2. Buzdugan Gh., M. Blumenfeld Calculul de rezisten al pieselor de maini, Editura Tehnic,
Bucureti, 1979.
3. Drghici I. .a. - ndrumar de proiectare n construcia de maini, vol.I i II, Editura Tehnic,
Bucureti, 1982.
4. Filipoiu I.D., A. Tudor Transmisii mecanice (ndrumar de proiectare), U.P.B., 2005
5. Gafianu M. .a. - Organe de Maini, vol I, Editura Didactic i Pedagogic, 1981.
6. Gafianu M. .a. - Organe de Maini, vol II, Editura Didactic i Pedagogic, 1983.
7. Gafianu M. - Rulmeni, - Proiectare i tehnologie vol I, II Editura Tehnic, 1985.
8. Manea Gh. - Organe de Maini, vol I, Editura Tehnic, 1970.
9. Rabinovici I. .a. - Rulmeni, Editura Tehnic, Bucureti, 1972.
10. Rdulescu Gh. .a .- ndrumar de proiectare n construcia de maini, Editura Tehnic, 1986.
11. Rdulescu Gh. - Organe de Maini, vol II, Angrenaje cilindrice, I.P.B., 1978.
12. W.J. Bartz Getriebesthmierung, Expert Verlag, 1989.
13. E. Almoreanu, Gh. Buzdugan ndrumar de calcul n ingineria mecanic, Editura Tehnic,
1996
14. A. Chiiu Organe de maini, Editura Didactic i Pedagogic, Bucureti, 1981
15. A. Jula, D. Velicu, Proiectarea angrenajelor evolventice, Editura Scrisul Romnesc, 1989
16. Sauer L. .a. - Angrenaje, vol I i II, Editura Tehnic, Bucureti, 1970.
17. xxx Culegere de standarde de organe de maini vol I a, Editura Tehnic, Bucureti, 1980.
18. Crudu I. .a., Atlas Reductoare cu roi dinate, Editura Didactic i Pedagogic, 1982.
19. xxx - Products Catalogue U.M.E.B.
69
Vous aimerez peut-être aussi
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- REDUCTEUR DE VITESSE MEMOIRE CorrigéDocument78 pagesREDUCTEUR DE VITESSE MEMOIRE CorrigéJeremie Ivann NGOYEPas encore d'évaluation
- Dimensionnement Des Arbres PDFDocument42 pagesDimensionnement Des Arbres PDFounaies mohamed100% (1)
- Étude Et Conception D'un Outil À Bande Pour La Réalisation de La Charnière Inférieure de Réfrigérateur B-C 50Document145 pagesÉtude Et Conception D'un Outil À Bande Pour La Réalisation de La Charnière Inférieure de Réfrigérateur B-C 50Mohamed BorniPas encore d'évaluation
- TD3 Fatigue Arbre Transmission CorrectionDocument4 pagesTD3 Fatigue Arbre Transmission CorrectionZahi Aek100% (7)
- Chapitre 1 - Conception MécaniqueDocument20 pagesChapitre 1 - Conception Mécaniqueسيف الدين يعقوبيPas encore d'évaluation
- 5-Calcul Des ArbresDocument15 pages5-Calcul Des ArbresChokri AtefPas encore d'évaluation
- CHAPITRE 5 - Calcul Des RoulementsDocument5 pagesCHAPITRE 5 - Calcul Des RoulementsAnouar100% (24)
- Etude Et Conception D'un Reducteur de Vitesse Coxial À Deux ÉtagesDocument125 pagesEtude Et Conception D'un Reducteur de Vitesse Coxial À Deux ÉtagesKhemili Sayf100% (1)
- Théorie de CoupeDocument30 pagesThéorie de CoupeMec Inov83% (6)
- Guide de L'usinageDocument496 pagesGuide de L'usinageZizou Zidane43% (14)
- Trains EngrenageDocument9 pagesTrains Engrenagefouad80% (5)
- Cours EngrenageDocument31 pagesCours EngrenageUdei Schikhaui100% (19)
- Cahier Meca 3 STDocument137 pagesCahier Meca 3 STMohamed Mtaallah100% (18)
- Fabrication Mecanique Cours PDFDocument89 pagesFabrication Mecanique Cours PDFDeckard Regis Shaw100% (3)
- Fabrication Avancee Et Methodes Industrielles Tome 1Document68 pagesFabrication Avancee Et Methodes Industrielles Tome 1abdouou31Pas encore d'évaluation
- Presses Mécanique, Hydrauliques Et PneumatiquesDocument12 pagesPresses Mécanique, Hydrauliques Et PneumatiquesYacine Bougrinat88% (16)
- Engrenage HéliquoidaleDocument105 pagesEngrenage HéliquoidaleKhemili SayfPas encore d'évaluation
- Réducteurs de Vitesse À Engrenages PDFDocument44 pagesRéducteurs de Vitesse À Engrenages PDFerzrzretgertfertge91% (11)
- Calcul Des Arbres Application Au Cas de L Arbre Tambour Du Treuil Oil Well 8Document61 pagesCalcul Des Arbres Application Au Cas de L Arbre Tambour Du Treuil Oil Well 8siPas encore d'évaluation
- Sujet de Projet Banc D'essai de FlexionDocument73 pagesSujet de Projet Banc D'essai de FlexionHajar Oumnas100% (3)
- Réducteure de VitesseDocument35 pagesRéducteure de VitesseKhemili SayfPas encore d'évaluation
- Guidage en Rotation Par Roulements (BT Et KB)Document6 pagesGuidage en Rotation Par Roulements (BT Et KB)MIMFS69% (13)
- Analyse Fonctionnelle VoitureDocument10 pagesAnalyse Fonctionnelle VoitureSliim Amiri100% (1)
- Calcul Des ArbresDocument8 pagesCalcul Des ArbresKamel Bousnina100% (1)
- Guide Tournage FraisageDocument19 pagesGuide Tournage Fraisagemaraghni_hassine759267% (3)
- Transmission de PuissanceDocument59 pagesTransmission de Puissancentayoub100% (8)
- Les EngrenagesDocument10 pagesLes Engrenagessouheil_souPas encore d'évaluation
- Chapitre 3 Calcul ArbreDocument8 pagesChapitre 3 Calcul ArbreYousif AliPas encore d'évaluation
- CM - Variateurs de Vitesse MecaniquesDocument29 pagesCM - Variateurs de Vitesse Mecaniquestarek05950% (2)
- Cours RessortsDocument43 pagesCours RessortsYounessElkarkouri100% (1)
- Calcul D'accouplementDocument1 pageCalcul D'accouplementnajim68100% (3)
- Roue Et Vis Sans FinDocument14 pagesRoue Et Vis Sans FinBoris Cathérin Vidjannagni DOHOUPas encore d'évaluation
- Cours Poulies Courroie PDFDocument1 pageCours Poulies Courroie PDFBabacarDiago100% (2)
- Conception Et Dimensionnement D'une Rouleuse À Quatre RouleauxDocument180 pagesConception Et Dimensionnement D'une Rouleuse À Quatre Rouleauxwilfried100% (2)
- Transmission de Puissance EngrenagesDocument31 pagesTransmission de Puissance Engrenagesiraoui jamal (Ebay)Pas encore d'évaluation
- Construction MécaniqueDocument3 pagesConstruction MécaniqueBaathie Sarr73% (11)
- Fiabilité, maintenance prédictive et vibration des machinesD'EverandFiabilité, maintenance prédictive et vibration des machinesPas encore d'évaluation
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants. Le guide complet de la Fusion 360 d'Autodesk !D'EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants. Le guide complet de la Fusion 360 d'Autodesk !Pas encore d'évaluation
- Vitesse A EngrenagesDocument44 pagesVitesse A EngrenagesSousou FoufouPas encore d'évaluation
- Formulaire Concernant Les Systèmes MécaniquesDocument64 pagesFormulaire Concernant Les Systèmes Mécaniqueselouan maitrePas encore d'évaluation
- Commande Vectorielle de La Machine AsyncDocument64 pagesCommande Vectorielle de La Machine Asynchat mahdiPas encore d'évaluation
- b5431 Ressort À Lames-4Document14 pagesb5431 Ressort À Lames-4Mariem SahbaniPas encore d'évaluation
- These Lionel Vido 2005-12-04Document222 pagesThese Lionel Vido 2005-12-04Yasser BenioualPas encore d'évaluation
- Guide TPE2Document36 pagesGuide TPE2Christoffe MariusPas encore d'évaluation
- Mariem lfc1 PDFDocument105 pagesMariem lfc1 PDFValerie MelendezPas encore d'évaluation
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- Conception Assistée Par Ordinateur (CAO)Document16 pagesConception Assistée Par Ordinateur (CAO)Lyes100% (1)
- These Ahmed FrikhaDocument141 pagesThese Ahmed FrikhaAicha BenchekrounPas encore d'évaluation
- Poulies Et Courroies de Transmission: Entraînement Par AdhérenceDocument26 pagesPoulies Et Courroies de Transmission: Entraînement Par AdhérenceWalid BelaaziPas encore d'évaluation
- Livre Physique 7D 7cDocument164 pagesLivre Physique 7D 7csj4y55bd4xPas encore d'évaluation
- CM 3A ReducteurDocument37 pagesCM 3A ReducteurMoudi BouhlelPas encore d'évaluation
- Commande Vectorielle de La Machine AsyncDocument63 pagesCommande Vectorielle de La Machine Asynczouhair qobiPas encore d'évaluation
- MMC PDFDocument106 pagesMMC PDFHu SsmPas encore d'évaluation
- Cours de Transmission Mécanique 2015 (Enregistré Automatiquement)Document31 pagesCours de Transmission Mécanique 2015 (Enregistré Automatiquement)Boris Cathérin Vidjannagni DOHOUPas encore d'évaluation
- Calcul Assemblage Vissé PDFDocument24 pagesCalcul Assemblage Vissé PDFhadad100% (2)
- Cahier SI SEM I + Media 2Document121 pagesCahier SI SEM I + Media 2Michri SaleckPas encore d'évaluation
- Cours Theorie Des Mecanismes PDFDocument12 pagesCours Theorie Des Mecanismes PDFmaraghni_hassine7592100% (2)
- Abir BookDocument115 pagesAbir BookMohamednjahi OmriPas encore d'évaluation
- 2 Classification HydrauliqueDocument26 pages2 Classification HydrauliqueHamza Akik100% (1)
- 5w9f5-Serie II Oscillations Libres 2011 2012Document1 page5w9f5-Serie II Oscillations Libres 2011 2012مفتاح الدينPas encore d'évaluation
- Les Procédés Humides À La Soude Ou Au Carbonate de SoudeDocument4 pagesLes Procédés Humides À La Soude Ou Au Carbonate de SoudeChaimae BadourPas encore d'évaluation
- Cond 340iDocument82 pagesCond 340igerheqhPas encore d'évaluation
- Elasticite Cours PDFDocument14 pagesElasticite Cours PDFSalah MohammedPas encore d'évaluation
- TP CatalaseDocument5 pagesTP CatalaseBichou Derres0% (1)
- Devoir de Synthèse N°1 - Sciences Physiques - 3ème Math (2014-2015) MR RAMZI REBAIDocument4 pagesDevoir de Synthèse N°1 - Sciences Physiques - 3ème Math (2014-2015) MR RAMZI REBAIaliPas encore d'évaluation
- Correction Exercices Photometrie 2Document4 pagesCorrection Exercices Photometrie 2DJ Sly Kimo67% (3)
- Cours Chimie Min - RaleDocument61 pagesCours Chimie Min - RaleKibanePas encore d'évaluation
- Scale Formation in A Walkingbeam Steel Reheat FurnaceDocument143 pagesScale Formation in A Walkingbeam Steel Reheat FurnaceДимитър СлавовPas encore d'évaluation
- Guide Placo 2006Document184 pagesGuide Placo 2006mustaphaxaPas encore d'évaluation
- Les Lois de La Reaction Chimique 4Document4 pagesLes Lois de La Reaction Chimique 4منةيصةبصسكبةPas encore d'évaluation
- Partie 10Document6 pagesPartie 10Beny AbdouPas encore d'évaluation
- FONCTION TRANSMETTRE L ÉNERGIE Aspect Technologique (Guidage en Rotation) Reponse Applications PDFDocument18 pagesFONCTION TRANSMETTRE L ÉNERGIE Aspect Technologique (Guidage en Rotation) Reponse Applications PDFBen Fah100% (3)
- OSSIADocument12 pagesOSSIArayane chPas encore d'évaluation
- La Sécurité en LaboratoireDocument250 pagesLa Sécurité en LaboratoirexargathPas encore d'évaluation
- CH.3 Calcul Des Pannes PDFDocument20 pagesCH.3 Calcul Des Pannes PDFromPas encore d'évaluation
- 07 - Titrage PH VinaigreDocument3 pages07 - Titrage PH VinaigreChartier Julien50% (2)
- La Métaphysique de L'evenementDocument28 pagesLa Métaphysique de L'evenementLesabendio7100% (1)
- Biophysique chapIIIDocument18 pagesBiophysique chapIIInourPas encore d'évaluation
- ColoflexDocument1 pageColoflexAbdelilah Ouedghiri SaidiPas encore d'évaluation
- Doctorat - Mod+®lisation Du S+®chage Solaire Des Boues R+®siduaires Urbaines - AMADOU - Haoua - 2007Document248 pagesDoctorat - Mod+®lisation Du S+®chage Solaire Des Boues R+®siduaires Urbaines - AMADOU - Haoua - 2007Dhikrane Nafaa100% (1)
- Fiche TomateDocument2 pagesFiche TomateabdouzadPas encore d'évaluation
- Boutons CYNTRA IP54Document2 pagesBoutons CYNTRA IP54sd23Pas encore d'évaluation
- Fertigation Sol Et Hors Sol - Complet - Mars 2015 - 2Document56 pagesFertigation Sol Et Hors Sol - Complet - Mars 2015 - 2Soumaya Idrissi100% (1)
- Magendie Precis Elementaire de Physiologie 1Document455 pagesMagendie Precis Elementaire de Physiologie 1Min ChoiPas encore d'évaluation
- Chromato 1Document55 pagesChromato 1Abdelkamel BahiPas encore d'évaluation
- Echangeur Fermentation LevureDocument3 pagesEchangeur Fermentation LevureDalila AmmarPas encore d'évaluation
- Chauffe Eaux SolairesDocument33 pagesChauffe Eaux SolairesAbdou DigaPas encore d'évaluation
- Chapitre 3 Dynamique Des Fluides Parfaits IncompressiblesDocument10 pagesChapitre 3 Dynamique Des Fluides Parfaits IncompressiblesLarbi Elbakkali50% (2)
- MetauxDocument13 pagesMetauxDarel NadjieraPas encore d'évaluation