Vous aimerez peut-être aussi
- Corrigé CNC Physique 2 MP 2022Document10 pagesCorrigé CNC Physique 2 MP 2022aymane85100% (1)
- CTRL PropositionfDocument2 pagesCTRL PropositionfboulaichPas encore d'évaluation
- 2018-2019 - UE2 Electromagnetisme 2 - DS2 ReponsesDocument3 pages2018-2019 - UE2 Electromagnetisme 2 - DS2 Reponsesmael.lemouroux2002Pas encore d'évaluation
- M7 Methodes 2008-2009Document1 pageM7 Methodes 2008-2009KIEMDEPas encore d'évaluation
- CNC MP 2016 Physique 2 Corrige PDFDocument9 pagesCNC MP 2016 Physique 2 Corrige PDFYassir Sadiq ElfilaliPas encore d'évaluation
- I-Transmission de Signaux Par Voie HertzienneDocument9 pagesI-Transmission de Signaux Par Voie HertzienneMourad LkPas encore d'évaluation
- 1 Sujets Des TP CodeCalcIndDocument78 pages1 Sujets Des TP CodeCalcIndYassine SariaPas encore d'évaluation
- TD3 CorrigeDocument7 pagesTD3 CorrigeMbm SidePas encore d'évaluation
- MEC04 StickSlipDocument3 pagesMEC04 StickSlipVictor B.Pas encore d'évaluation
- Centrale Supelec MP 2009 Physique CorrigeDocument9 pagesCentrale Supelec MP 2009 Physique CorrigeMolka HarbaouiPas encore d'évaluation
- 2019-2020 - UE2 Electromagnétisme 2 - DS2 (Réponses)Document3 pages2019-2020 - UE2 Electromagnétisme 2 - DS2 (Réponses)mael.lemouroux2002Pas encore d'évaluation
- Mécanique Du PointDocument4 pagesMécanique Du PointVictor B.100% (1)
- Mouvements Plans Resume de Cours 1 1Document3 pagesMouvements Plans Resume de Cours 1 1Najimou Alade TidjaniPas encore d'évaluation
- Applications Affines PDFDocument8 pagesApplications Affines PDFKhadim NdiayePas encore d'évaluation
- (Ame) (FO) Formulaire Actions MecaniquesDocument2 pages(Ame) (FO) Formulaire Actions MecaniquesPatrice SEDILLEPas encore d'évaluation
- Formulaire ÉlectromagnétismeDocument2 pagesFormulaire ÉlectromagnétismeChalipiaPas encore d'évaluation
- Cours - Equations Differentielles Et Suites Recurrentes Lineaires PDFDocument10 pagesCours - Equations Differentielles Et Suites Recurrentes Lineaires PDFherve joelPas encore d'évaluation
- ATS Physique 957Document6 pagesATS Physique 957Paolo HoguoPas encore d'évaluation
- (Dyn) (TD) Arbre de NavireDocument2 pages(Dyn) (TD) Arbre de NaviremohammedPas encore d'évaluation
- Correction TD2 ElectriciteDocument11 pagesCorrection TD2 ElectriciteAyoub Brhmmouch100% (1)
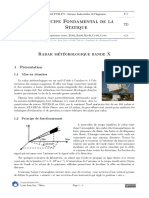
- (PFS) (TD) Radar Meteorologique PDFDocument4 pages(PFS) (TD) Radar Meteorologique PDFAero ClubPas encore d'évaluation
- (Tec) (TD) DifferentielDocument5 pages(Tec) (TD) DifferentielJAOUAD BOUSSOUFPas encore d'évaluation
- Magnetostatique LocaleDocument16 pagesMagnetostatique LocaleMohamed Es-sedratyPas encore d'évaluation
- (TDP) (TD) DifferentielDocument5 pages(TDP) (TD) DifferentielYosr MaizaPas encore d'évaluation
- CorrectionTDPhyM2 DynamiqueDocument10 pagesCorrectionTDPhyM2 DynamiqueLucasPas encore d'évaluation
- Ccs MP phch12017Document12 pagesCcs MP phch12017FATIMA HADDANIPas encore d'évaluation
- Cours1 - Activite - Interference-A 2ondes - CorrectionDocument6 pagesCours1 - Activite - Interference-A 2ondes - Correctionkute2001Pas encore d'évaluation
- Corrigé Tsi CNC 2019Document9 pagesCorrigé Tsi CNC 2019Ali BraikiPas encore d'évaluation
- Corr MP TD CIN DYN NRJDocument21 pagesCorr MP TD CIN DYN NRJboukottaya borhenePas encore d'évaluation
- Formules FrenetDocument2 pagesFormules FrenetÀm IR Amiro'sPas encore d'évaluation
- Formules FrenetDocument2 pagesFormules Frenetlapuzine04Pas encore d'évaluation
- Formules FrenetDocument2 pagesFormules FrenetLē JøkērPas encore d'évaluation
- Solution Serie0Document11 pagesSolution Serie0MehdiPas encore d'évaluation
- Cours MagnétostatiqueDocument16 pagesCours MagnétostatiqueAdel ToumiPas encore d'évaluation
- DS2 Mecanique 20 21Document2 pagesDS2 Mecanique 20 21Hasnae MoulimPas encore d'évaluation
- DM9 CorrDocument9 pagesDM9 CorrVert ImmobPas encore d'évaluation
- Chapitre 2 Champ Et Potentiel Lydex Cas UsuellesDocument13 pagesChapitre 2 Champ Et Potentiel Lydex Cas Usuellesnaouaouistories.2021Pas encore d'évaluation
- Robot TribarDocument2 pagesRobot TribarPixel Stuff0% (1)
- correction_oscillateur_amortiDocument11 pagescorrection_oscillateur_amortielbiyatimanalPas encore d'évaluation
- EFS Physique1 2021 CompletDocument2 pagesEFS Physique1 2021 Completasmaa saadPas encore d'évaluation
- (PFS) (TD) Camion GrueDocument2 pages(PFS) (TD) Camion GrueKouamé Illan KonanPas encore d'évaluation
- Corrigés - Série 1Document11 pagesCorrigés - Série 1thiziroarour0Pas encore d'évaluation
- GeoIIc 2 PDFDocument8 pagesGeoIIc 2 PDFNdeye Fatou SallPas encore d'évaluation
- ELM Fiche PDFDocument4 pagesELM Fiche PDFAyoub MaqdadPas encore d'évaluation
- TSI ModelisationDocument12 pagesTSI ModelisationISSOUSSI fatima ezzahraPas encore d'évaluation
- Corrig+® de La S+®rie 2-Cin+®m MI 2021-14Document1 pageCorrig+® de La S+®rie 2-Cin+®m MI 2021-14Sabrina LAMRANIPas encore d'évaluation
- M1TD e PDFDocument3 pagesM1TD e PDFTahiri MehdiPas encore d'évaluation
- TD4 Statique CorrigeDocument13 pagesTD4 Statique CorrigeAKRAMPas encore d'évaluation
- SERIE 5 MécaniqueDocument1 pageSERIE 5 MécaniqueEld Ayoub100% (1)
- E Ph2psi2018Document7 pagesE Ph2psi2018ahmadPas encore d'évaluation
- Fiche Forces UsuellesDocument3 pagesFiche Forces UsuellesNajimou Alade Tidjani100% (1)
- Dernière Partie de CoursDocument7 pagesDernière Partie de CoursIlham KinichPas encore d'évaluation
- Cours - Equations Differentielles Et Suites Recurrentes LineairesDocument11 pagesCours - Equations Differentielles Et Suites Recurrentes LineairesMaitredixPas encore d'évaluation
- Co 17 Dec 19 OMM3Document3 pagesCo 17 Dec 19 OMM3mohameddiagana573Pas encore d'évaluation
- TD - Mtc.a21 HERMADocument32 pagesTD - Mtc.a21 HERMAhaloimemsPas encore d'évaluation
- Fiche de RévisionsDocument3 pagesFiche de Révisionskdb5vj9vycPas encore d'évaluation
- Prob3-Ondes EM Plasma1 CorrigéDocument15 pagesProb3-Ondes EM Plasma1 CorrigéAymane ESSALIMPas encore d'évaluation
- 2019-2020 - UE2 Electromagnétisme 1 - Examen (Réponses)Document3 pages2019-2020 - UE2 Electromagnétisme 1 - Examen (Réponses)Amstrong 234Pas encore d'évaluation
- TergoDocument8 pagesTergoMartial KOUNKEPas encore d'évaluation
- Memento Enseignement AM Math-Info v1.0 18-07-12Document4 pagesMemento Enseignement AM Math-Info v1.0 18-07-12elementsPas encore d'évaluation
- Nature de La GravitationDocument8 pagesNature de La GravitationenzoPas encore d'évaluation
- DM Thermo BethDocument6 pagesDM Thermo BethYoussef MzabiPas encore d'évaluation
- DM12 Expérience Stern GerlachDocument7 pagesDM12 Expérience Stern GerlachYoussef MzabiPas encore d'évaluation
- DM Chimie RevisionDocument2 pagesDM Chimie RevisionMolka HarbaouiPas encore d'évaluation
- Analyse AsymptotiqueDocument4 pagesAnalyse AsymptotiqueYoussef MzabiPas encore d'évaluation
- Martin 16 17Document98 pagesMartin 16 17Youssef MzabiPas encore d'évaluation
- TD Mouvement Dans Un Champ de Forces Centrales-Resultas-AidesDocument2 pagesTD Mouvement Dans Un Champ de Forces Centrales-Resultas-AidesYoussef MzabiPas encore d'évaluation
- 07 PolynÃmes Et Fractions RationnellesDocument8 pages07 PolynÃmes Et Fractions RationnellesYoussef MzabiPas encore d'évaluation
- td1 ZNZDocument7 pagestd1 ZNZYoussef MzabiPas encore d'évaluation
- 08 Nombres RéelsDocument4 pages08 Nombres RéelsYoussef Mzabi0% (1)
- 04 Intégration Sur Un SegmentDocument4 pages04 Intégration Sur Un SegmentAdam MoallaPas encore d'évaluation
- TD Primitives Et Équations DifférentiellesDocument4 pagesTD Primitives Et Équations DifférentiellesYoussef MzabiPas encore d'évaluation
- Annexes-Mouvement Dans Un Champ de Forces CentralesDocument4 pagesAnnexes-Mouvement Dans Un Champ de Forces CentralesYoussef MzabiPas encore d'évaluation
- Annexe-Solides en Rotation Autour Dun Axe FixeDocument2 pagesAnnexe-Solides en Rotation Autour Dun Axe FixeYoussef MzabiPas encore d'évaluation
- Aide Pour Trouver Un Sujet de Tipe Oriente Math Ou InfoDocument5 pagesAide Pour Trouver Un Sujet de Tipe Oriente Math Ou InfoYoussef MzabiPas encore d'évaluation
- PB 083Document1 pagePB 083Youssef MzabiPas encore d'évaluation
- Comment Synthétiser Une Liasse de Documents 2019Document6 pagesComment Synthétiser Une Liasse de Documents 2019Youssef MzabiPas encore d'évaluation
- MP MATHS CENTRALE 2 2014.rapportDocument3 pagesMP MATHS CENTRALE 2 2014.rapportYoussef MzabiPas encore d'évaluation
- Algebre II PolynomesDocument12 pagesAlgebre II PolynomesYoussef MzabiPas encore d'évaluation
- ATG05 CH 3Document35 pagesATG05 CH 3Youssef MzabiPas encore d'évaluation
- MÉTHODOLOGIE DE LA RESTITUTION D'UNE VIDEO (BCPST) RevisitedDocument4 pagesMÉTHODOLOGIE DE LA RESTITUTION D'UNE VIDEO (BCPST) RevisitedYoussef MzabiPas encore d'évaluation
- Assessment Sheet ATS 2022Document1 pageAssessment Sheet ATS 2022Youssef MzabiPas encore d'évaluation
- 2015PA066379Document125 pages2015PA066379Youssef MzabiPas encore d'évaluation
- Assessment Sheet 2022Document1 pageAssessment Sheet 2022Youssef MzabiPas encore d'évaluation
- Aubenque Problemes AristoteliciensDocument2 pagesAubenque Problemes AristoteliciensAmwin minm0% (1)
- Guide Aplus2Document138 pagesGuide Aplus2Galilea RuanoPas encore d'évaluation
- Pierre Teilhard Du Chardin - Le Coeur de La MatièreDocument230 pagesPierre Teilhard Du Chardin - Le Coeur de La Matièrestis73100% (1)
- Rapport de StageDocument14 pagesRapport de StagesaidPas encore d'évaluation
- Facebook Mot de Passe Hack GratuitDocument2 pagesFacebook Mot de Passe Hack Gratuitlegalcategory245Pas encore d'évaluation
- Calculs Façades Mills PDFDocument1 pageCalculs Façades Mills PDFRalf Lo100% (1)
- IMECO CatalogueDocument31 pagesIMECO Catalogueasiyapcommercial1Pas encore d'évaluation
- Fondamentaux Communication D'entrepriseDocument10 pagesFondamentaux Communication D'entreprisefallPas encore d'évaluation
- Vinçotte Installation Domestique Electrique 2022 FRDocument40 pagesVinçotte Installation Domestique Electrique 2022 FRPetar PetrovPas encore d'évaluation
- 203-Article Text-754-1-10-20200802Document18 pages203-Article Text-754-1-10-20200802Ahmed MardasPas encore d'évaluation
- Piece 2c - Agdez - PortailDocument80 pagesPiece 2c - Agdez - PortailMohammed DarroussiPas encore d'évaluation
- Le Tourneur-Mécanicien Filetage Et Travaux Speciaux, E.sodanoDocument178 pagesLe Tourneur-Mécanicien Filetage Et Travaux Speciaux, E.sodanoaymenPas encore d'évaluation
- Résumé de Géologie 2024Document2 pagesRésumé de Géologie 2024Kotbi MohamedPas encore d'évaluation
- Ligne Minière Est 27 06 18 VFDocument46 pagesLigne Minière Est 27 06 18 VFAbbas EulmiPas encore d'évaluation
- Lecture Facile Le Chauffeur Deinstein - 149298Document1 pageLecture Facile Le Chauffeur Deinstein - 149298Hajar EL ABBADIPas encore d'évaluation
- Cours D'économie de Production Niveau 5-1Document68 pagesCours D'économie de Production Niveau 5-1Leo Jospinho100% (1)
- Exposé Géotechnique RoutiéreDocument43 pagesExposé Géotechnique RoutiéreMamadou SowPas encore d'évaluation
- BL30 - Effecteurs MusculairesDocument32 pagesBL30 - Effecteurs MusculairesAmine El ZergPas encore d'évaluation
- Pannes Et Depannage D'un GeDocument5 pagesPannes Et Depannage D'un GeYacoubaPas encore d'évaluation
- Guide 1Document16 pagesGuide 1Ktat fatmaPas encore d'évaluation
- L3 - Hydrogéologie - Cours - Chapitre 01Document21 pagesL3 - Hydrogéologie - Cours - Chapitre 01Yasmine Ouardia KARROUMPas encore d'évaluation
- Recristallisation Et Temperature de FusionDocument9 pagesRecristallisation Et Temperature de FusionhamoumPas encore d'évaluation
- AE2415ZDocument2 pagesAE2415ZAndres VargazPas encore d'évaluation
- Livret Pédagogique EAD PHILOSOPHIE 2017-2018Document113 pagesLivret Pédagogique EAD PHILOSOPHIE 2017-2018Anonymous LOcT0gjqdSPas encore d'évaluation
- Pages Choisie S 18800 B LoyDocument432 pagesPages Choisie S 18800 B LoyMathieu Victor100% (1)
- CORRIGE MACRO L1 Sept 2005Document7 pagesCORRIGE MACRO L1 Sept 2005souad mhiriPas encore d'évaluation
- Le Management Et Le Controle de Gestion PPT VFDocument34 pagesLe Management Et Le Controle de Gestion PPT VFJihane YoussoufiPas encore d'évaluation
- Lecture Schema Electrique BepDocument4 pagesLecture Schema Electrique BepMBIA FIDELIN YVES100% (2)
- Bottero, Pierre - (La Quete D'ewilan-3) L'ile Du DestinDocument265 pagesBottero, Pierre - (La Quete D'ewilan-3) L'ile Du DestinNaheuPas encore d'évaluation
- La Place de La Comptabilité Analytique de GestionDocument9 pagesLa Place de La Comptabilité Analytique de GestionNourredine SabriPas encore d'évaluation
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieD'EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- Transformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitD'EverandTransformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitÉvaluation : 4 sur 5 étoiles4/5 (14)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- La vie des abeilles: Prix Nobel de littératureD'EverandLa vie des abeilles: Prix Nobel de littératureÉvaluation : 4 sur 5 étoiles4/5 (41)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- Harmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020D'EverandHarmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Approvisionnement et traitement de l’eau: Les Grands Articles d'UniversalisD'EverandApprovisionnement et traitement de l’eau: Les Grands Articles d'UniversalisPas encore d'évaluation
- 160 ressources pour se lancer dans la vidéo quand on n’y connait rienD'Everand160 ressources pour se lancer dans la vidéo quand on n’y connait rienPas encore d'évaluation
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Enseigner une Langue Etrangère Par l’Apprentissage HybrideD'EverandEnseigner une Langue Etrangère Par l’Apprentissage HybridePas encore d'évaluation
- Conception & Modélisation CAO: Le guide ultime du débutantD'EverandConception & Modélisation CAO: Le guide ultime du débutantPas encore d'évaluation
- Anatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursD'EverandAnatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursPas encore d'évaluation
- Cancer - Leucémie: Et autres maladies apparemment incurables, mais guérissables avec des moyens naturelsD'EverandCancer - Leucémie: Et autres maladies apparemment incurables, mais guérissables avec des moyens naturelsPas encore d'évaluation
- Semer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumeD'EverandSemer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumePas encore d'évaluation
- Cahier de jeux de stimulation cognitive: Sujets Alzheimer, désorientés, démences, amnésiesD'EverandCahier de jeux de stimulation cognitive: Sujets Alzheimer, désorientés, démences, amnésiesPas encore d'évaluation
- Puissance naturelles - Que faire si votre "meilleure partie" est en grève?: Puissance naturelles-améliorer les recours pour augmenter la virilité de la capacité à obtenir une érection de fermetéD'EverandPuissance naturelles - Que faire si votre "meilleure partie" est en grève?: Puissance naturelles-améliorer les recours pour augmenter la virilité de la capacité à obtenir une érection de fermetéÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Le B.A.-Ba de la communication: Comment convaincre, informer, séduire ?D'EverandLe B.A.-Ba de la communication: Comment convaincre, informer, séduire ?Évaluation : 3 sur 5 étoiles3/5 (1)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaD'EverandL'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaÉvaluation : 3 sur 5 étoiles3/5 (1)