Vous aimerez peut-être aussi
- Orca Share Media1671134389143 7009245652922088811Document50 pagesOrca Share Media1671134389143 7009245652922088811Nodjoud KhawelaPas encore d'évaluation
- Chap02 - Modèle Géométrique Direct PDFDocument19 pagesChap02 - Modèle Géométrique Direct PDFBadr Kaakoua100% (2)
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Modélisation GéométriqueDocument16 pagesModélisation GéométriqueAissa HadjoudjaPas encore d'évaluation
- RobInd TD1Document2 pagesRobInd TD1mezianePas encore d'évaluation
- Robotique IndustrielleDocument32 pagesRobotique IndustrielleSofia Berry100% (3)
- RobInd TD1 PDFDocument2 pagesRobInd TD1 PDFUriel Nguefack100% (1)
- Khalil-Dombre Modelisation PDFDocument52 pagesKhalil-Dombre Modelisation PDFspeedov73100% (1)
- 3 0 Systèmes Mécaniques Articulés Et RobotiqueDocument100 pages3 0 Systèmes Mécaniques Articulés Et RobotiqueredaPas encore d'évaluation
- TD 2 - 2021Document2 pagesTD 2 - 2021hiba gribaPas encore d'évaluation
- Modèle Géométrique DirectDocument7 pagesModèle Géométrique DirectMed MaxPas encore d'évaluation
- Cours Robotique 15decDocument31 pagesCours Robotique 15decIheb KahouachPas encore d'évaluation
- RobInd Ch3p3 PDFDocument24 pagesRobInd Ch3p3 PDFSi Mohamed RahiliPas encore d'évaluation
- RobotiqueDocument10 pagesRobotiqueMounir FrijaPas encore d'évaluation
- Chapitre 3Document17 pagesChapitre 3salahPas encore d'évaluation
- Formation Fanuc Technicien Ete19Document64 pagesFormation Fanuc Technicien Ete19Zied RaouakPas encore d'évaluation
- Exos RobotiqueDocument39 pagesExos RobotiqueZeyd Zizo50% (2)
- CHAP 4a CINEMATIQUE 2018-2019Document6 pagesCHAP 4a CINEMATIQUE 2018-2019gerard correaPas encore d'évaluation
- Travaux Dirigés Robotique 1 2020Document4 pagesTravaux Dirigés Robotique 1 2020marwa hamdiPas encore d'évaluation
- Le Calcul de Roulements by FEM With CatiaDocument12 pagesLe Calcul de Roulements by FEM With CatiaJohn JohnPas encore d'évaluation
- Cour Commande de Robot de ManipulationDocument30 pagesCour Commande de Robot de ManipulationBAHAPas encore d'évaluation
- Théorie Des Mécanismes L3Document15 pagesThéorie Des Mécanismes L3Shake SpearePas encore d'évaluation
- Chapitre 3 PDFDocument8 pagesChapitre 3 PDFAmd JedPas encore d'évaluation
- Reglage MocnDocument10 pagesReglage MocnlabfaoPas encore d'évaluation
- TD PHY106 2022.02.05 Cinépatique-EnergétiqueDocument3 pagesTD PHY106 2022.02.05 Cinépatique-Energétiquesamuellamboni918Pas encore d'évaluation
- TD 1Document3 pagesTD 1Khalid Ahyeoud100% (1)
- 1.cinematique Du PointDocument9 pages1.cinematique Du PointMedway BenPas encore d'évaluation
- Polycopié Des Travaux Dirigés de Mécanique Du PointDocument43 pagesPolycopié Des Travaux Dirigés de Mécanique Du PointNisrine Nisrinita50% (2)
- Chapitre 3Document57 pagesChapitre 3Oussama AbirPas encore d'évaluation
- Modèle Cinématique Du RobotDocument2 pagesModèle Cinématique Du RobotMed MaxPas encore d'évaluation
- 08-2 Dynamique Du Solide - TDDocument24 pages08-2 Dynamique Du Solide - TDAdonaï SolangaPas encore d'évaluation
- TD Robotique Aiac 2020 2021Document8 pagesTD Robotique Aiac 2020 2021Captain Teddy BearPas encore d'évaluation
- Chap. 6 Calcul Des Portiques - Méthode Des Déplacements - 2 PDFDocument12 pagesChap. 6 Calcul Des Portiques - Méthode Des Déplacements - 2 PDFBoris Ganmavo80% (5)
- Visitez CoursExercices - Com Chapitre-3-Systeme-Robotisc3a9.pdf 963Document4 pagesVisitez CoursExercices - Com Chapitre-3-Systeme-Robotisc3a9.pdf 963ismailPas encore d'évaluation
- TD Robotique 3gecapi 2023 2024Document8 pagesTD Robotique 3gecapi 2023 2024diaguely.sylla.etu21Pas encore d'évaluation
- La Mise en Position IsostatiqueDocument17 pagesLa Mise en Position IsostatiqueGhaya HamitouchePas encore d'évaluation
- Chapitre 4 CinematiqueDocument19 pagesChapitre 4 CinematiqueAbeka Kader100% (1)
- Systeme BielleDocument2 pagesSysteme BielleGabin SagotPas encore d'évaluation
- Mecanique Du SolideDocument129 pagesMecanique Du SolideSîdïMôhâmèdBën100% (1)
- Chapitre IIIDocument5 pagesChapitre IIIZERARKA Mohamed FawziPas encore d'évaluation
- Elements Cinetiques SolidesDocument5 pagesElements Cinetiques SolidesMohamed Whb100% (1)
- TP1 Sujet PDFDocument4 pagesTP1 Sujet PDFImed BarçaPas encore d'évaluation
- 2GSM TP Robotique 20 21Document8 pages2GSM TP Robotique 20 21LOUTFI BELLAPas encore d'évaluation
- Devoir de Ratrapage Mecanique Du PointDocument2 pagesDevoir de Ratrapage Mecanique Du PointPreparation TafemPas encore d'évaluation
- TP Dut-Etk2 2016Document6 pagesTP Dut-Etk2 2016ibrazizi2000Pas encore d'évaluation
- Odometrie 2010Document12 pagesOdometrie 2010Barza BogdanPas encore d'évaluation
- Chapitre 4Document35 pagesChapitre 4CHiZORI 19Pas encore d'évaluation
- Lecture 4-Cinématique Inverse-PositionDocument12 pagesLecture 4-Cinématique Inverse-Positioninesboumaiza293Pas encore d'évaluation
- TP Robotique 3gecapi 2023 2024Document8 pagesTP Robotique 3gecapi 2023 2024diaguely.sylla.etu21Pas encore d'évaluation
- TP 2 GMDVDocument6 pagesTP 2 GMDVmewguv Ahmed salekPas encore d'évaluation
- GEometrie Des MasseDocument31 pagesGEometrie Des Masseriadfathouni.enactusPas encore d'évaluation
- Chap 2Document16 pagesChap 2ZA CBPas encore d'évaluation
- Sujet1 Robotique AitlahcenDocument4 pagesSujet1 Robotique AitlahcenCaptain Teddy BearPas encore d'évaluation
- ROBOTICS Part 3Document30 pagesROBOTICS Part 3Bassem JendoubiPas encore d'évaluation
- RobInd Ch2p1Document31 pagesRobInd Ch2p1AYOUB EL MOUTTAQIPas encore d'évaluation
- TD1 - Mécanique Du Point 2020-2021Document2 pagesTD1 - Mécanique Du Point 2020-2021Ibrahima KonatePas encore d'évaluation
- La Commande NumeriqueDocument18 pagesLa Commande NumeriqueqaadilPas encore d'évaluation
- PDF AutoDocument37 pagesPDF AutoAbd el moumen HemiciPas encore d'évaluation
- TD1Document1 pageTD1Abd el moumen HemiciPas encore d'évaluation
- Serie n2 Map84Document5 pagesSerie n2 Map84Abd el moumen HemiciPas encore d'évaluation
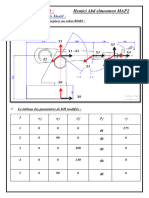
- Devoir Robotique MAP2Document8 pagesDevoir Robotique MAP2Abd el moumen HemiciPas encore d'évaluation
- NIVEAUDocument6 pagesNIVEAUAbd el moumen HemiciPas encore d'évaluation
- Cours ACMDocument97 pagesCours ACMBensalem100% (1)
- TP 1 CommandeDocument9 pagesTP 1 CommandeAbd el moumen HemiciPas encore d'évaluation
- Exercices Pour EntrainerDocument3 pagesExercices Pour EntrainerAbd el moumen HemiciPas encore d'évaluation
- TP Acm RapportDocument16 pagesTP Acm RapportAbd el moumen HemiciPas encore d'évaluation
- TP Acm RapportDocument16 pagesTP Acm RapportAbd el moumen HemiciPas encore d'évaluation
- HemiciDocument8 pagesHemiciAbd el moumen HemiciPas encore d'évaluation
- Document de Revision Finale Pour NYADocument13 pagesDocument de Revision Finale Pour NYASara LelongPas encore d'évaluation
- Chapitre 2Document4 pagesChapitre 2MustaphaPas encore d'évaluation
- Pendule Elastique Exercices Non Corriges 3Document6 pagesPendule Elastique Exercices Non Corriges 3ayoubPas encore d'évaluation
- Ch2 TICE 2016 Cinétique Électrochimique ImpressionDocument54 pagesCh2 TICE 2016 Cinétique Électrochimique ImpressionLeo DOMINGUEZPas encore d'évaluation
- QUESTIONNAIRE3 (TP Loscilloscope)Document7 pagesQUESTIONNAIRE3 (TP Loscilloscope)Nada DjenanePas encore d'évaluation
- Etat D - Equilibre D'un SystemeDocument8 pagesEtat D - Equilibre D'un SystemeOskar GottliebPas encore d'évaluation
- Correction-TD - Système Du Second Ordre - AII3Document8 pagesCorrection-TD - Système Du Second Ordre - AII32TowPas encore d'évaluation
- Bombe HDocument5 pagesBombe HPhobos Elfa100% (1)
- Chapitre 01 - 2022-2023 - Rappels-ELECT - Etudiant PDFDocument15 pagesChapitre 01 - 2022-2023 - Rappels-ELECT - Etudiant PDFaliou KEBEPas encore d'évaluation
- Série 2 Les Ondes Mécaniques Progressives PériodiquesDocument6 pagesSérie 2 Les Ondes Mécaniques Progressives PériodiquesIhdih KarouchPas encore d'évaluation
- 2004 09 National Sujet Du - Chlore - Dans - EauDocument4 pages2004 09 National Sujet Du - Chlore - Dans - Eauالغزيزال الحسن EL GHZIZAL HassanePas encore d'évaluation
- Champ Elec Grav Et MagDocument28 pagesChamp Elec Grav Et MagHanine HmidaPas encore d'évaluation
- Exercices-Les Ondes MécaniquesDocument6 pagesExercices-Les Ondes MécaniquesRedouane Reda92% (12)
- Minera Fiche Technique Poste Socle Ff23jDocument2 pagesMinera Fiche Technique Poste Socle Ff23jkhakadam0% (1)
- CI09 TD23 Sujet - Déterminer Une Loi Entrée-Sortie Par Fermeture CinématiqueDocument6 pagesCI09 TD23 Sujet - Déterminer Une Loi Entrée-Sortie Par Fermeture CinématiqueKhaled JberiPas encore d'évaluation
- Couple Outil-Piece 3Document4 pagesCouple Outil-Piece 3Mohamed Abed100% (1)
- TP2V1Document7 pagesTP2V1أشرف عبودPas encore d'évaluation
- CHUTE VERTICALE - 2 - 2023Document3 pagesCHUTE VERTICALE - 2 - 2023Oumaima AkhdimPas encore d'évaluation
- M Ecanique Des FluidesDocument207 pagesM Ecanique Des Fluidesfazfrito lacaviataPas encore d'évaluation
- Ma Présentation ADDOUDocument32 pagesMa Présentation ADDOUMahmoud OuryemchiPas encore d'évaluation
- Livrable 1 - Équipe 7 GCI200Document33 pagesLivrable 1 - Équipe 7 GCI200GBA65Pas encore d'évaluation
- Datasheet Manual MAGE STDR095C PDFDocument2 pagesDatasheet Manual MAGE STDR095C PDFعقيد السبئيPas encore d'évaluation
- Transforamteur TriphaséDocument21 pagesTransforamteur TriphaséDavid RutherfordPas encore d'évaluation
- Bus MVBDocument41 pagesBus MVBFatima EzzahraPas encore d'évaluation
- BTS CPI Sciences Physiques 2006Document9 pagesBTS CPI Sciences Physiques 2006ToufikJalalEddinePas encore d'évaluation
- Crs UEF1.1 - Rappels Outils MathematiqueDocument14 pagesCrs UEF1.1 - Rappels Outils MathematiqueFox BenPas encore d'évaluation
- Biomécanique IMS FinalDocument283 pagesBiomécanique IMS FinalDemai SifeddinePas encore d'évaluation
- CORRECTD2Document3 pagesCORRECTD2Ahmadou Yerima AbbaPas encore d'évaluation
- Cours Le Poids Et La Masse Prof - Sohofi (WWW - Pc1.ma)Document2 pagesCours Le Poids Et La Masse Prof - Sohofi (WWW - Pc1.ma)Prince Abdoo100% (1)
- Compte Rendu VentiloDocument13 pagesCompte Rendu VentiloAbdelhamid Oughanem43% (7)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- Bioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainD'EverandBioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainÉvaluation : 4 sur 5 étoiles4/5 (2)
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- le Phoenix de nos âmes: Les lois énergétiques de la lumière divineD'Everandle Phoenix de nos âmes: Les lois énergétiques de la lumière divinePas encore d'évaluation
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Signe pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FranceD'EverandSigne pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FrancePas encore d'évaluation
- Guide complet de la Numérologie: Édition 30e anniversaireD'EverandGuide complet de la Numérologie: Édition 30e anniversaireÉvaluation : 4 sur 5 étoiles4/5 (1)
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)