Vous aimerez peut-être aussi
- 2DDL 7Document2 pages2DDL 7Abdennour Aimene AmraniPas encore d'évaluation
- Cour Complet Oscillations Forcées 1DDLDocument5 pagesCour Complet Oscillations Forcées 1DDLAnya Hernafi100% (1)
- TD1 - Physique Des Vibrations - CorrectionDocument7 pagesTD1 - Physique Des Vibrations - CorrectionMdzayd EL FahimePas encore d'évaluation
- TD Propagation Guidée CorrectionDocument6 pagesTD Propagation Guidée Correctionsoumaya bsdPas encore d'évaluation
- Points Cours_Mouvement Dans Un Champ UniformeDocument6 pagesPoints Cours_Mouvement Dans Un Champ UniformesocranedeoufPas encore d'évaluation
- Semaine 9Document5 pagesSemaine 9Kpabou KpabouPas encore d'évaluation
- Chapitre 1, Corde Vibrante Partie 1Document5 pagesChapitre 1, Corde Vibrante Partie 1Macoc YoutubePas encore d'évaluation
- Essai de FlexionDocument15 pagesEssai de FlexionISMAIL EL KHADDARPas encore d'évaluation
- Les Oscillateurs MecaniquesDocument74 pagesLes Oscillateurs Mecaniquesahmed kitariPas encore d'évaluation
- Nengoueye Takam Brondol Vianney Tpe MSNLDocument7 pagesNengoueye Takam Brondol Vianney Tpe MSNLdilanho takamPas encore d'évaluation
- Chapitre II-ElectrocinétiqueMP1-2023Document18 pagesChapitre II-ElectrocinétiqueMP1-2023rvhqsvr24wPas encore d'évaluation
- SERIEN°3MFDocument13 pagesSERIEN°3MFrachida lakaazPas encore d'évaluation
- ccmp 1 2019 corrigéDocument3 pagesccmp 1 2019 corrigéaybche90Pas encore d'évaluation
- Correction de Td2 de Dynamique Du Point 1TSIDocument4 pagesCorrection de Td2 de Dynamique Du Point 1TSIOussama SahnounPas encore d'évaluation
- MQ2 TDC Schrodinger PotentielDocument16 pagesMQ2 TDC Schrodinger PotentielallabryanzePas encore d'évaluation
- Examen8 Ondes Et VibrationDocument3 pagesExamen8 Ondes Et VibrationGames PlayerPas encore d'évaluation
- Semaine 8Document8 pagesSemaine 8Kpabou KpabouPas encore d'évaluation
- Cour Oscillations Libres 2ddl 1Document5 pagesCour Oscillations Libres 2ddl 1Hazhaz MedhiPas encore d'évaluation
- Solution ExamenDocument3 pagesSolution Examenmohamed faresPas encore d'évaluation
- Quelques Exercices Avec SolutionsDocument15 pagesQuelques Exercices Avec SolutionsGHEZLAOUI AymenePas encore d'évaluation
- Cour Oscillations Libres 2ddl 2Document5 pagesCour Oscillations Libres 2ddl 2Anfel AbPas encore d'évaluation
- Résistance Des Matériaux - HyperstaticitéDocument2 pagesRésistance Des Matériaux - Hyperstaticitémoamad metelusPas encore d'évaluation
- Chapitre 3 PDFDocument9 pagesChapitre 3 PDFwissam bellilPas encore d'évaluation
- Chapitre 1 RegDocument12 pagesChapitre 1 Regcheikh tidiane diopPas encore d'évaluation
- Optimisation Sans ContraintesDocument7 pagesOptimisation Sans ContraintesWarPas encore d'évaluation
- Solutions SERIE N 01 TD TCMA 2022-2023Document5 pagesSolutions SERIE N 01 TD TCMA 2022-2023Younes ChaouchePas encore d'évaluation
- OscillationsForc C3 A9es2DDL v3Document6 pagesOscillationsForc C3 A9es2DDL v3Anfel AbPas encore d'évaluation
- Solution D'examDocument4 pagesSolution D'examJalal TiYalPas encore d'évaluation
- 3 Condition Aux Limites de Robin Par FDM 1Document4 pages3 Condition Aux Limites de Robin Par FDM 1Adel BenmessaoudPas encore d'évaluation
- L3 Cours Maths Dynamiques Chapitre V 02062020-2Document12 pagesL3 Cours Maths Dynamiques Chapitre V 02062020-2Lucien Zeh MballaPas encore d'évaluation
- Chap 1Document16 pagesChap 1Raouia SayahPas encore d'évaluation
- TD1 Résolution de Systèmes D'équations LinéairesDocument2 pagesTD1 Résolution de Systèmes D'équations Linéairesjouhaina nasri100% (1)
- Solution Examen 20-2 1Document3 pagesSolution Examen 20-2 1FaroukPas encore d'évaluation
- Moment CinétiqueDocument16 pagesMoment CinétiqueDora BoraPas encore d'évaluation
- Méthodes Économétriques Séance Du 01042020 - Hafid El HassaniDocument5 pagesMéthodes Économétriques Séance Du 01042020 - Hafid El HassaniAyyoub DriouechPas encore d'évaluation
- Semaine 5Document9 pagesSemaine 5Kpabou KpabouPas encore d'évaluation
- Chapitre 2 Methode Operationnelle - CopieDocument12 pagesChapitre 2 Methode Operationnelle - Copiecheikh tidiane diopPas encore d'évaluation
- Chapitre 2 Methode OperationnelleDocument12 pagesChapitre 2 Methode Operationnellecheikh tidiane diopPas encore d'évaluation
- MQ2 TD Schrodinger PotentielDocument5 pagesMQ2 TD Schrodinger PotentielallabryanzePas encore d'évaluation
- Chapitre 2 - SupersymetrieDocument30 pagesChapitre 2 - SupersymetriehessoulPas encore d'évaluation
- TD3 CorrigeDocument7 pagesTD3 CorrigeRomaissa LoulhaciPas encore d'évaluation
- Compte Rendu TP de L'automatique Non LineaireDocument30 pagesCompte Rendu TP de L'automatique Non LineaireTALLI KHADIJAPas encore d'évaluation
- Réaction OpposéDocument6 pagesRéaction OpposéhasnaechougraniPas encore d'évaluation
- TAF 2 Calcul Dynamique - Watsop Piankeu Noel - 16G03301Document9 pagesTAF 2 Calcul Dynamique - Watsop Piankeu Noel - 16G03301watsopPas encore d'évaluation
- Chapitre IIDocument4 pagesChapitre IIdihia didaPas encore d'évaluation
- Chapitre III - Méthodes Itératives de Résolution de Systèmes LinéairesDocument3 pagesChapitre III - Méthodes Itératives de Résolution de Systèmes LinéairesMounaim MatiniPas encore d'évaluation
- Mathématiques 1: La Loi Du Demi-CercleDocument6 pagesMathématiques 1: La Loi Du Demi-CercleSat KoosPas encore d'évaluation
- Examene Physique 03 VF 2022Document5 pagesExamene Physique 03 VF 2022Omar LANGEURPas encore d'évaluation
- EAMAC PHYSIQUE INGDocument38 pagesEAMAC PHYSIQUE INGabdoulkarimouedraogo5589Pas encore d'évaluation
- B-Devoir de Préparation Au DS 3 - CorrigéDocument7 pagesB-Devoir de Préparation Au DS 3 - Corrigéhedidbz38Pas encore d'évaluation
- SN°4 MFluidesDocument7 pagesSN°4 MFluidesrachida lakaazPas encore d'évaluation
- Equation de Saint-VenantDocument3 pagesEquation de Saint-Venantndn NgondzaPas encore d'évaluation
- TPMCC Auriol Idriss ElliottDocument13 pagesTPMCC Auriol Idriss Elliottoteme Mbella King DuclairPas encore d'évaluation
- 1-Résumé de Cours Corde VibranteDocument2 pages1-Résumé de Cours Corde VibranteMacoc YoutubePas encore d'évaluation
- 2021 01 Test Vibrations CorrigéDocument9 pages2021 01 Test Vibrations CorrigéBouvier RémiPas encore d'évaluation
- Ondes Et VibrationsDocument2 pagesOndes Et VibrationsJuanDeagDZPas encore d'évaluation
- Champ Électrostatique Créé Par Un CondensateurDocument2 pagesChamp Électrostatique Créé Par Un CondensateurInes MahjoubPas encore d'évaluation
- RAt-DDS 2015 PDFDocument1 pageRAt-DDS 2015 PDFaaerPas encore d'évaluation
- BétonarméakifDocument168 pagesBétonarméakifAyoub FekkoukiPas encore d'évaluation
- NF EN 13480-4 AC2 Tuyauterie Industrielle Métallique Fabrication Et InstallationDocument6 pagesNF EN 13480-4 AC2 Tuyauterie Industrielle Métallique Fabrication Et InstallationaminePas encore d'évaluation
- Piezo Common Rail PCR 2 DV4TD Ford (001 097)Document97 pagesPiezo Common Rail PCR 2 DV4TD Ford (001 097)Luc Mutombo MukuluPas encore d'évaluation
- AzziSmail AzziBDocument69 pagesAzziSmail AzziBOubachir Mi DouPas encore d'évaluation
- Etude Expérimentale en Vue D'un Modèle de Comportement Pour La Vase de TunisDocument12 pagesEtude Expérimentale en Vue D'un Modèle de Comportement Pour La Vase de TunisGeotech NicalPas encore d'évaluation
- Poussoir HydrauliqueDocument6 pagesPoussoir HydrauliqueFosseni DialloPas encore d'évaluation
- TMF Corrigé TD Tuyère Et AubeDocument6 pagesTMF Corrigé TD Tuyère Et AubeAnonymous 80p9OVPas encore d'évaluation
- Généralités: Selon ISO 724Document3 pagesGénéralités: Selon ISO 724M.Khaled GdouraPas encore d'évaluation
- Manuel 300 Tei 2020Document176 pagesManuel 300 Tei 2020pierre lathierePas encore d'évaluation
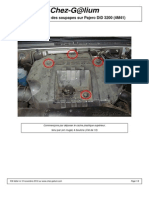
- Réglage Du Jeu Des Soupapes Sur Pajero DiD 3200 (4M41)Document9 pagesRéglage Du Jeu Des Soupapes Sur Pajero DiD 3200 (4M41)Maroselli CharlesPas encore d'évaluation
- CHapitre2 - Travaux Dirigés - Contact de HertzDocument3 pagesCHapitre2 - Travaux Dirigés - Contact de HertzHamza MokhtariPas encore d'évaluation
- 9327 Controle Des Engrenages EnspsDocument8 pages9327 Controle Des Engrenages EnspsKouchad FouadPas encore d'évaluation
- 01-EC225 LP - ATA 00 - Premier Contact Avec L'hélicoptère - T1 - FRDocument44 pages01-EC225 LP - ATA 00 - Premier Contact Avec L'hélicoptère - T1 - FRLung KhanPas encore d'évaluation
- STATIQUE DES FLUIDES ProfDocument12 pagesSTATIQUE DES FLUIDES ProfAbdoulnassirou BassongouPas encore d'évaluation
- Présentation Étude PontDocument34 pagesPrésentation Étude PontIlyes TakellaletPas encore d'évaluation
- Merged 20200624 232813Document118 pagesMerged 20200624 232813Anas LghaziPas encore d'évaluation
- Controle Métaux PDFDocument15 pagesControle Métaux PDFfatimazahra kheraziPas encore d'évaluation
- Ex 21 1 Boule de Billard Sur Table TournanteDocument5 pagesEx 21 1 Boule de Billard Sur Table TournanteDIBIPas encore d'évaluation
- 5-1boite de Cisaillement PDFDocument4 pages5-1boite de Cisaillement PDFUomoD'AffariPas encore d'évaluation
- TD1 MISP2 ThermodynamiqueDocument2 pagesTD1 MISP2 ThermodynamiqueYRO AUBAINPas encore d'évaluation
- Statique FrottementDocument33 pagesStatique FrottementŒū Ssa MēPas encore d'évaluation
- Rapport PFE FinalDocument87 pagesRapport PFE Finalmoez ben youssef100% (1)
- Résistance Des Structures - 20230109Document190 pagesRésistance Des Structures - 20230109arcPas encore d'évaluation
- Pipe SizingDocument4 pagesPipe SizingmarwitosPas encore d'évaluation
- Mathieu Le Nel 33359 Kergourlay Le-Nel Pince-Hgw Notice-CalculDocument15 pagesMathieu Le Nel 33359 Kergourlay Le-Nel Pince-Hgw Notice-CalculMouhsineAtbPas encore d'évaluation
- Module Hydraulique BT MSDocument16 pagesModule Hydraulique BT MSOB1dimiPas encore d'évaluation
- M13-Etude Coffrage Ferraillage Éléments porteur-BTP-TDBDocument71 pagesM13-Etude Coffrage Ferraillage Éléments porteur-BTP-TDBDriss Benomar100% (13)
- PiquageDocument4 pagesPiquagefanfan.boreauPas encore d'évaluation
- CHAUDIERE Codes Defauts Basse Temprature Saunier DuvalDocument12 pagesCHAUDIERE Codes Defauts Basse Temprature Saunier DuvalFaguilarPas encore d'évaluation