Vous aimerez peut-être aussi
- Cours D'arabe Parlé Palestinien, Moïn Halloun Tome 1Document4 pagesCours D'arabe Parlé Palestinien, Moïn Halloun Tome 1NizarMHallounPas encore d'évaluation
- SDH (Système Du Design Humain) - 4typesDocument15 pagesSDH (Système Du Design Humain) - 4typesExperience Electrique100% (12)
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Bioinformatique ExamenDocument24 pagesBioinformatique ExamenSôümïã Tôu100% (1)
- Etude Temporel Des SystèmesDocument10 pagesEtude Temporel Des Systèmesdonald youngouaPas encore d'évaluation
- Annexe 2Document4 pagesAnnexe 2Abd El heyPas encore d'évaluation
- Elecsysteme Chapitre 03Document7 pagesElecsysteme Chapitre 03gastronomicaPas encore d'évaluation
- Chap 3 AutDocument12 pagesChap 3 AutAyoub AkoucharPas encore d'évaluation
- Cours Automatique Séance4 2023 2024Document48 pagesCours Automatique Séance4 2023 2024AMJADPas encore d'évaluation
- 612a28196e724tp Maths Transformee de Laplace Bts GoDocument4 pages612a28196e724tp Maths Transformee de Laplace Bts Gokoffi gerardPas encore d'évaluation
- Chapitre II - Systèmes Du Premier Ordre - AII3Document5 pagesChapitre II - Systèmes Du Premier Ordre - AII32TowPas encore d'évaluation
- Chap 5 AutDocument18 pagesChap 5 AutJean-Pierre AwuPas encore d'évaluation
- Réponse D'un Système LineaireDocument27 pagesRéponse D'un Système LineaireanasPas encore d'évaluation
- Cours SLCI1 AutomaTIQUEDocument20 pagesCours SLCI1 AutomaTIQUElahceneljandouz358Pas encore d'évaluation
- Ch4 Système Du Premier Ordre - EtudetemporelleDocument5 pagesCh4 Système Du Premier Ordre - EtudetemporelleMoulod MouloudPas encore d'évaluation
- Résumé Du Chapitre 3Document5 pagesRésumé Du Chapitre 3MD HM BCPas encore d'évaluation
- Cours AutomatiqueDocument77 pagesCours AutomatiqueAmadou Abdoulaye DIENGPas encore d'évaluation
- AutomatismeDocument32 pagesAutomatismeYass561Pas encore d'évaluation
- 612a8ec74e6d8sujet Transformation de Laplace BtsDocument5 pages612a8ec74e6d8sujet Transformation de Laplace Btskoffi gerard0% (1)
- Chapitre 2 Modélisation Mathématique Des Systèmes AsservisDocument11 pagesChapitre 2 Modélisation Mathématique Des Systèmes AsservisSmati DjamelPas encore d'évaluation
- TD 05 Corrigé - Comportement Temporel Des SLCI Proportionnel, Dérivateur, Intégrateur Et Du 1er OrdreDocument6 pagesTD 05 Corrigé - Comportement Temporel Des SLCI Proportionnel, Dérivateur, Intégrateur Et Du 1er OrdreMohamed AbaakilPas encore d'évaluation
- Ch6Systèmedesecondordre EtudetemporelleDocument7 pagesCh6Systèmedesecondordre EtudetemporelleYVANPas encore d'évaluation
- TD Auto Asservissement Echantillonne L3EMDocument3 pagesTD Auto Asservissement Echantillonne L3EMSanhouidi StephanePas encore d'évaluation
- Cours 7 - StabilitéDocument8 pagesCours 7 - StabilitéImad NouniPas encore d'évaluation
- Leçon 2 A&RDocument15 pagesLeçon 2 A&RAimé BIHONDAPas encore d'évaluation
- Cours Slci2Document16 pagesCours Slci2moipopPas encore d'évaluation
- Régulation 2Document41 pagesRégulation 2Soukaina AmnayPas encore d'évaluation
- Ch5 Système Du Premier Ordre Généralisé - Etude TemporelleDocument4 pagesCh5 Système Du Premier Ordre Généralisé - Etude TemporelleFerdi AbdelbaqiPas encore d'évaluation
- Travaux Dirigés Asservissements Continus 18Document18 pagesTravaux Dirigés Asservissements Continus 18Yassine HaniniPas encore d'évaluation
- Chap - 1 - Séance 01 - Généralités Sur Les SystèmesDocument6 pagesChap - 1 - Séance 01 - Généralités Sur Les SystèmeskhaledPas encore d'évaluation
- 1-Ordre1 TemporelDocument2 pages1-Ordre1 Temporeladnane.lahkimPas encore d'évaluation
- Chapitre 3 SC.Document20 pagesChapitre 3 SC.Ayman LamzouriPas encore d'évaluation
- Identification 2 ND OrdreDocument11 pagesIdentification 2 ND OrdrevolcanPas encore d'évaluation
- Correction TD2 SMP S6 M35 2019-20Document13 pagesCorrection TD2 SMP S6 M35 2019-20iuyhukyPas encore d'évaluation
- Régulation 1Document34 pagesRégulation 1Soukaina AmnayPas encore d'évaluation
- Chapitre 1 TLDocument13 pagesChapitre 1 TLmaymoun jabnouniPas encore d'évaluation
- ANNEXE3Document8 pagesANNEXE3Abd El heyPas encore d'évaluation
- Automatique Chap2Document33 pagesAutomatique Chap2Modibo ToloPas encore d'évaluation
- TP Systeme AsservisDocument6 pagesTP Systeme AsservisHamza Hamza ToumliltPas encore d'évaluation
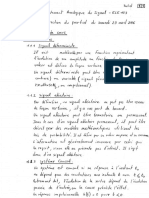
- Traitement Analogique Du Signal - ELE103 (CNAM Saclay) - EXAM - TAS - 29!04!2006 - Corrige+sujet - NBDocument20 pagesTraitement Analogique Du Signal - ELE103 (CNAM Saclay) - EXAM - TAS - 29!04!2006 - Corrige+sujet - NByanyahka1Pas encore d'évaluation
- 3 Analyse Temporelle Des Systemes LineairesDocument8 pages3 Analyse Temporelle Des Systemes LineairesMeryem RAHMOUNIPas encore d'évaluation
- Chapitre 1 - Représentation D'état (Model, Identi, Surve)Document10 pagesChapitre 1 - Représentation D'état (Model, Identi, Surve)Wissal KhamariPas encore d'évaluation
- RFWERFAWEFDocument18 pagesRFWERFAWEFCHOUKI REDAPas encore d'évaluation
- 126 Resume Asserv 2020 PDFDocument20 pages126 Resume Asserv 2020 PDFafif ikramePas encore d'évaluation
- Résumé Asservissement SIDocument20 pagesRésumé Asservissement SIBalalaŇaŖîf100% (6)
- Complement Chapitre-2Document27 pagesComplement Chapitre-2DouaaPas encore d'évaluation
- Réponse Frequentielle Systèmes LinDocument19 pagesRéponse Frequentielle Systèmes LinBoujah Wel LimamPas encore d'évaluation
- Cours4 PDFDocument42 pagesCours4 PDFAurel ManPas encore d'évaluation
- Point de Fonctionnement D Un RPACDocument3 pagesPoint de Fonctionnement D Un RPACantoine18.2Pas encore d'évaluation
- TD 1 Régulation Industrielle 2017-BFDocument17 pagesTD 1 Régulation Industrielle 2017-BFamine milano100% (1)
- Chapitre 2Document10 pagesChapitre 2fihakhir aminePas encore d'évaluation
- Chap3 Partie1 FinalDocument5 pagesChap3 Partie1 FinalprojectpodnewPas encore d'évaluation
- TP N°01 Analyse Temporelle D'un Syst'eme Dynamique Du 1er OrdreDocument16 pagesTP N°01 Analyse Temporelle D'un Syst'eme Dynamique Du 1er OrdreSamy BOUARROUPas encore d'évaluation
- Commande Avancée PDFDocument296 pagesCommande Avancée PDFBouazzaPas encore d'évaluation
- 4 Fonction de TransfertDocument18 pages4 Fonction de TransfertAna SmaalPas encore d'évaluation
- Chapitre 1Document10 pagesChapitre 1ADEM BELDIPas encore d'évaluation
- TP N1 SLMDocument2 pagesTP N1 SLMNadhir BndPas encore d'évaluation
- 2021 2022 Pcsi ReponsetemporelleDocument20 pages2021 2022 Pcsi ReponsetemporelleAmal FatouhPas encore d'évaluation
- Chapitre 3 Analyse Temporelle Des SLIDocument36 pagesChapitre 3 Analyse Temporelle Des SLIJamal Eljamoudi MarrakechPas encore d'évaluation
- CH 2Document9 pagesCH 2Rahal karimPas encore d'évaluation
- Chapitre 2Document13 pagesChapitre 2Hakim MadridPas encore d'évaluation
- TD1 CLS2021Document3 pagesTD1 CLS2021Nadhir BndPas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Chap 4Document30 pagesChap 4OMAR ENNAJIPas encore d'évaluation
- Chap 5Document31 pagesChap 5OMAR ENNAJIPas encore d'évaluation
- Chap 5 SuiteDocument42 pagesChap 5 SuiteOMAR ENNAJIPas encore d'évaluation
- Chap 1-2Document33 pagesChap 1-2OMAR ENNAJIPas encore d'évaluation
- CPAV-Rep-Ex2 Emb-FreinDocument4 pagesCPAV-Rep-Ex2 Emb-FreinOMAR ENNAJIPas encore d'évaluation
- Chap 3Document35 pagesChap 3OMAR ENNAJIPas encore d'évaluation
- Cours (Conception Des Machine I)Document260 pagesCours (Conception Des Machine I)KHALIL IDRISSIPas encore d'évaluation
- RDM 2Document25 pagesRDM 2OMAR ENNAJIPas encore d'évaluation
- Introduction Aux PIC de MicrochipDocument37 pagesIntroduction Aux PIC de MicrochipOMAR ENNAJIPas encore d'évaluation
- Comm CalacDocument7 pagesComm CalacSlim SaloumPas encore d'évaluation
- Sol Ex ExamDocument2 pagesSol Ex ExamOMAR ENNAJIPas encore d'évaluation
- Embedded LINUX - LINUX TutorialDocument21 pagesEmbedded LINUX - LINUX TutorialOMAR ENNAJIPas encore d'évaluation
- Les Methodes NumeriqueDocument14 pagesLes Methodes NumeriqueOMAR ENNAJIPas encore d'évaluation
- CoursI 2 1Document10 pagesCoursI 2 1OMAR ENNAJIPas encore d'évaluation
- RDM 1Document45 pagesRDM 1OMAR ENNAJIPas encore d'évaluation
- Robot Desinfecteur Des HopitauxDocument13 pagesRobot Desinfecteur Des HopitauxOMAR ENNAJIPas encore d'évaluation
- Robot Desinfecteur Des HopitauxDocument14 pagesRobot Desinfecteur Des HopitauxOMAR ENNAJIPas encore d'évaluation
- Cours4 MPLABX IDE V2.25Document21 pagesCours4 MPLABX IDE V2.25Oumaima ChmarkhPas encore d'évaluation
- C1 Modelisation Des MecanismesDocument6 pagesC1 Modelisation Des MecanismesOMAR ENNAJIPas encore d'évaluation
- Intro Et Représentation Des SADocument28 pagesIntro Et Représentation Des SAOMAR ENNAJIPas encore d'évaluation
- Les Ports E-SDocument10 pagesLes Ports E-SOMAR ENNAJIPas encore d'évaluation
- TD Shã© Ma CinematiqueDocument2 pagesTD Shã© Ma CinematiqueOMAR ENNAJIPas encore d'évaluation
- Le Pic 16f84aDocument23 pagesLe Pic 16f84aOMAR ENNAJIPas encore d'évaluation
- Bases de Programmation CDocument32 pagesBases de Programmation COMAR ENNAJIPas encore d'évaluation
- Compte Rendu TP ANALOGIEDocument11 pagesCompte Rendu TP ANALOGIEOMAR ENNAJIPas encore d'évaluation
- Jeu D - Instructions Du PIC16F84ADocument9 pagesJeu D - Instructions Du PIC16F84AOMAR ENNAJIPas encore d'évaluation
- Interruptions Du Pic 16f84aDocument11 pagesInterruptions Du Pic 16f84aOMAR ENNAJIPas encore d'évaluation
- Correcteur Part2Document20 pagesCorrecteur Part2OMAR ENNAJIPas encore d'évaluation
- Correcteur Part1Document13 pagesCorrecteur Part1OMAR ENNAJIPas encore d'évaluation
- PROSEHA Version Finale Nov 2016Document108 pagesPROSEHA Version Finale Nov 2016OUSMANPas encore d'évaluation
- تعبیر شرح نحو میر اردو سوال و جواب PDFDocument168 pagesتعبیر شرح نحو میر اردو سوال و جواب PDFDrJaved KhanPas encore d'évaluation
- Rapport D'activites EDST 2011Document24 pagesRapport D'activites EDST 2011Samir2020Pas encore d'évaluation
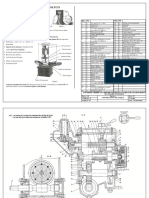
- M04 Technologie D-Entretien FGT-TSCG.865Document83 pagesM04 Technologie D-Entretien FGT-TSCG.865Khalil Lasfer100% (1)
- Les Echangeurs PDFDocument58 pagesLes Echangeurs PDFMohamed Rjeb100% (10)
- Glance 76Document48 pagesGlance 76Cayo YandjuePas encore d'évaluation
- QCM Réseau - Partie 3 - WayToLearnXDocument11 pagesQCM Réseau - Partie 3 - WayToLearnXAwonoPas encore d'évaluation
- Jean Houssaye Triange PedagogiqueDocument18 pagesJean Houssaye Triange PedagogiqueL'As De Pique100% (1)
- Relations Économiques Internationales - Copie S6Document112 pagesRelations Économiques Internationales - Copie S6Hayate Zaher50% (2)
- Adjectif Qualificatif cm1 45 4 01Document2 pagesAdjectif Qualificatif cm1 45 4 01mirelutza86Pas encore d'évaluation
- CONS MEC S3 GP1 2021.docx2Document7 pagesCONS MEC S3 GP1 2021.docx2babsbossgaye03Pas encore d'évaluation
- Resumé HistoireDocument11 pagesResumé HistoireOlfaPas encore d'évaluation
- TDR Cadre de Dialogue-1-1Document2 pagesTDR Cadre de Dialogue-1-1Bienvenu Hyacinthe SawadogoPas encore d'évaluation
- td5 Inf1Document2 pagestd5 Inf1touati karim100% (2)
- Cours Exploitation PortuaireDocument75 pagesCours Exploitation PortuaireMaher FriouiPas encore d'évaluation
- Tumeurs UrothelialesDocument40 pagesTumeurs UrothelialesAntoine AILLOUDPas encore d'évaluation
- EMD1314Document5 pagesEMD1314mohammed8nizarPas encore d'évaluation
- Equivalent Sable - CorrectionDocument7 pagesEquivalent Sable - CorrectionAyoub BAHIJ0% (1)
- Modele À FacteursDocument8 pagesModele À FacteursJean-Charles SohouenouPas encore d'évaluation
- TextesDocument16 pagesTextesDOULEZEROPas encore d'évaluation
- Documents Du Transport AerienDocument9 pagesDocuments Du Transport AerienLallaa Taki MaryamPas encore d'évaluation
- Dzi CV Hie OtheroneDocument7 pagesDzi CV Hie OtheronezeroldPas encore d'évaluation
- Atelier DESIGN THINKING - INSAT2023Document26 pagesAtelier DESIGN THINKING - INSAT2023Bochra ArfaouiPas encore d'évaluation
- Béton Armee AymenDocument47 pagesBéton Armee AymenbensofienPas encore d'évaluation
- Fraisage S3 3Document4 pagesFraisage S3 3aiglePas encore d'évaluation
- Les Methodes DenseignementDocument8 pagesLes Methodes DenseignementAhmad KonyPas encore d'évaluation
- Chapitre 6 - Guidage en TranslationDocument13 pagesChapitre 6 - Guidage en Translationahidouri100% (3)