Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Exercice 1 - Moteur À Courant ContinuDocument9 pagesExercice 1 - Moteur À Courant ContinuKOUADIO PATRICEPas encore d'évaluation
- TP Commande D'une Machine MCCDocument8 pagesTP Commande D'une Machine MCCMajected92Pas encore d'évaluation
- Contrôle 4 - 2023Document4 pagesContrôle 4 - 2023Bilal LaakelPas encore d'évaluation
- TP3-commande-dune-machine-mcceDocument7 pagesTP3-commande-dune-machine-mcceGhaffari WalidPas encore d'évaluation
- TD N2 Automatique-1Document4 pagesTD N2 Automatique-1dicherd MOUANDAPas encore d'évaluation
- TD Moteur À Courant ContinuDocument5 pagesTD Moteur À Courant ContinuIlyas MhammediPas encore d'évaluation
- Automatique Partie 1 v2Document5 pagesAutomatique Partie 1 v2Thomas DucatellePas encore d'évaluation
- DS Salc2021Document5 pagesDS Salc2021Abir HammamiPas encore d'évaluation
- RevMP Sii AutomatiqueDocument30 pagesRevMP Sii AutomatiqueRebbag AnassPas encore d'évaluation
- Sujet Commande DoctoratDocument3 pagesSujet Commande DoctoratAbd NACERIPas encore d'évaluation
- TP ModDocument10 pagesTP ModMohammed ALMUSHIAAPas encore d'évaluation
- TP N°01 PDFDocument11 pagesTP N°01 PDFBrahim GasbaouiPas encore d'évaluation
- Nu Par Schema BlocDocument4 pagesNu Par Schema BlocELmokhtar HamrouniPas encore d'évaluation
- DS-02-Sujet-VdefDocument6 pagesDS-02-Sujet-VdefAyoub Ben OthmanPas encore d'évaluation
- TP TSI Asservissement-Scilab - FinalDocument5 pagesTP TSI Asservissement-Scilab - FinalGribyPas encore d'évaluation
- CR Atelier 2 MCC-1Document13 pagesCR Atelier 2 MCC-1Iliass RMIKIPas encore d'évaluation
- Tpstabilitéangufinal 1Document14 pagesTpstabilitéangufinal 1الشاكر لله100% (1)
- TD SAMP 3.2 ParaboleDocument3 pagesTD SAMP 3.2 ParaboleSoulaiman AndahmouPas encore d'évaluation
- Etude Comparative Entre La Commande Vectorielle Et La Commande ScalaireDocument11 pagesEtude Comparative Entre La Commande Vectorielle Et La Commande ScalaireMohammed Reda Gaila100% (2)
- TP CommondDocument8 pagesTP CommondBilal HBPas encore d'évaluation
- E3c Spe Sciences Ingenieur Premiere 03797 Sujet OfficielDocument12 pagesE3c Spe Sciences Ingenieur Premiere 03797 Sujet OfficielKaled MRASSIPas encore d'évaluation
- TP MCCDocument14 pagesTP MCCMohamed BenalyPas encore d'évaluation
- TP4 Modélisation Et Simulation Du Comportement de La Machine À Courant Continu en Utilisant MATLAB/SimulinkDocument2 pagesTP4 Modélisation Et Simulation Du Comportement de La Machine À Courant Continu en Utilisant MATLAB/Simulinkbachar soumiaPas encore d'évaluation
- 2021 T CFMDocument66 pages2021 T CFMhousinmechani1Pas encore d'évaluation
- TP1 CorrDocument3 pagesTP1 CorrAnassPas encore d'évaluation
- Cours TaDocument25 pagesCours TaKara Reda100% (1)
- ch1 3eme PartieDocument7 pagesch1 3eme Partiesid aliPas encore d'évaluation
- TP AutomatiqueDocument1 pageTP AutomatiqueAbdullah Al-sharabiPas encore d'évaluation
- RobuRoc ProfDocument10 pagesRobuRoc ProfAbdelali YacoubiPas encore d'évaluation
- 314 PDFDocument5 pages314 PDFSaidDibPas encore d'évaluation
- (Corslci) (TD) RoburocDocument9 pages(Corslci) (TD) RoburocAbdelali YacoubiPas encore d'évaluation
- TD GWLDocument5 pagesTD GWLkika33% (3)
- BrahmiDocument5 pagesBrahmiabfstbmsodPas encore d'évaluation
- Antenne Radar PDFDocument6 pagesAntenne Radar PDFAya AbPas encore d'évaluation
- Machine AsynchroneDocument7 pagesMachine AsynchronehamidaPas encore d'évaluation
- TD Corrige Commande Et Observation Des SDocument42 pagesTD Corrige Commande Et Observation Des SRiham abPas encore d'évaluation
- BourahlaDocument10 pagesBourahlaMark ParaPas encore d'évaluation
- Commande MsapDocument6 pagesCommande Msapsakridj100% (1)
- 1 - TD. Energie PerpetuelleDocument4 pages1 - TD. Energie PerpetuelleMohammed EssabbarPas encore d'évaluation
- Chapitre 3 Regulation de La Vitesse Des Machines A Courant ContinuDocument7 pagesChapitre 3 Regulation de La Vitesse Des Machines A Courant Continuwalid aribiPas encore d'évaluation
- BAC 2023 STL - Jour 1Document10 pagesBAC 2023 STL - Jour 1LETUDIANTPas encore d'évaluation
- TP N°2-Etude Dune Machine AsynchroneDocument5 pagesTP N°2-Etude Dune Machine AsynchroneNaima mecherguiPas encore d'évaluation
- Représentation D'état Des SystèmesDocument2 pagesReprésentation D'état Des SystèmesQudýmãt Áhmèd100% (1)
- CI05 TD14 Sujet - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéDocument10 pagesCI05 TD14 Sujet - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéKhaled Jberi100% (1)
- Spé Génie Électrique ATS Machine À Courant Continu: Exercice N°1: Choix D'une Motorisation de Chariot AutomatiséDocument3 pagesSpé Génie Électrique ATS Machine À Courant Continu: Exercice N°1: Choix D'une Motorisation de Chariot AutomatisésalmanassriPas encore d'évaluation
- Modélisation Du Moteur Synchrone À Aimant PermanentDocument16 pagesModélisation Du Moteur Synchrone À Aimant PermanentHichem BourasPas encore d'évaluation
- TD AsservissementDocument9 pagesTD AsservissementAyoub ELJAFRYPas encore d'évaluation
- MP, PC, Psi, Tsi: Travaux PratiquesDocument4 pagesMP, PC, Psi, Tsi: Travaux Pratiquesissam legssairPas encore d'évaluation
- TD Courant Alternatif Série 1Document4 pagesTD Courant Alternatif Série 1alisettin145Pas encore d'évaluation
- Partie III - Motorisation de Processus ÉlectromécaniqueDocument11 pagesPartie III - Motorisation de Processus ÉlectromécaniqueAbdoul Kader OUATTARAPas encore d'évaluation
- Exerc I8214 Engrenages Fractions - Rationnelles.v066Document8 pagesExerc I8214 Engrenages Fractions - Rationnelles.v066Stéphane SantonPas encore d'évaluation
- TD N°4 Représentation Des SLCI FT Schémas Blocs SLCI Asservis 1 PDFDocument4 pagesTD N°4 Représentation Des SLCI FT Schémas Blocs SLCI Asservis 1 PDFseye abdou aziz50% (2)
- Serie1 2021 22Document3 pagesSerie1 2021 22JIKOOK IS REALPas encore d'évaluation
- 11720120710161753Document9 pages11720120710161753Youssef Ben KhemisPas encore d'évaluation
- TD2 Exercices Modélisation Des Systèmes Électriques Par Schéma BlocsDocument1 pageTD2 Exercices Modélisation Des Systèmes Électriques Par Schéma BlocsNawres MsakniPas encore d'évaluation
- Examen Automatique Linéaire 2020 - VFDocument12 pagesExamen Automatique Linéaire 2020 - VFazmohammedaminePas encore d'évaluation
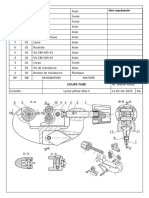
- Dessin D'ensemble Coupe-TubeDocument1 pageDessin D'ensemble Coupe-Tubeمهدي الرقيقPas encore d'évaluation
- Thème: Analyse ETDocument11 pagesThème: Analyse ETمهدي الرقيقPas encore d'évaluation
- 2616 Automatisme de Porte de Garage Presentation PDFDocument10 pages2616 Automatisme de Porte de Garage Presentation PDFEdmond OuattaraPas encore d'évaluation
- Devoir SmartDocument4 pagesDevoir Smartمهدي الرقيقPas encore d'évaluation
- Leçon 2Document2 pagesLeçon 2مهدي الرقيقPas encore d'évaluation
- Vue en CoupeDocument0 pageVue en Coupesaded05Pas encore d'évaluation
- Memo Pratique de L'orthographeDocument62 pagesMemo Pratique de L'orthographemechkad100% (4)
- 22 CopiDocument3 pages22 Copiمهدي الرقيقPas encore d'évaluation
- Dess DefDocument2 pagesDess Defمهدي الرقيقPas encore d'évaluation
- D - Cotation Fonctionnelle PDFDocument26 pagesD - Cotation Fonctionnelle PDFAnonymous Vhn6VwguSV100% (1)
- 22 CopiesDocument2 pages22 Copiesمهدي الرقيقPas encore d'évaluation
- 22 Copies5Document1 page22 Copies5مهدي الرقيقPas encore d'évaluation
- Conseils Pour Diminuer Votre Conso de Carburant1Document5 pagesConseils Pour Diminuer Votre Conso de Carburant1مهدي الرقيقPas encore d'évaluation
- Tole Rances Ge Ne RalesDocument19 pagesTole Rances Ge Ne Ralesمهدي الرقيقPas encore d'évaluation
- D CotationDocument1 pageD Cotationمهدي الرقيقPas encore d'évaluation
- Poste de PliageDocument4 pagesPoste de Pliageمهدي الرقيقPas encore d'évaluation
- 2013-04-23 Tole Rances Ge Ne Rales ISO 2768 PDFDocument2 pages2013-04-23 Tole Rances Ge Ne Rales ISO 2768 PDFMohamedBejjaPas encore d'évaluation
- Teched 910 CurrDocument58 pagesTeched 910 Currمهدي الرقيقPas encore d'évaluation
- Conseils Entretien AutoDocument5 pagesConseils Entretien Autoمهدي الرقيقPas encore d'évaluation
- Conseils Entretien AutoDocument5 pagesConseils Entretien Autoمهدي الرقيقPas encore d'évaluation
- Proverbes PDFDocument39 pagesProverbes PDFAngelo Di MariaPas encore d'évaluation
- Technologues 06Document3 pagesTechnologues 06مهدي الرقيقPas encore d'évaluation
- Ignacerak TechnologieDocument30 pagesIgnacerak Technologieمهدي الرقيقPas encore d'évaluation
- TransmissionDocument10 pagesTransmissionSlah TounsiPas encore d'évaluation
- Thermo Dy Nami QueDocument176 pagesThermo Dy Nami Queمهدي الرقيقPas encore d'évaluation
- Moteurs Cours 2 Cycles ThermodynamiquesDocument13 pagesMoteurs Cours 2 Cycles ThermodynamiqueskhaoulaPas encore d'évaluation
- 3 - Le Glaucome CongenitalDocument11 pages3 - Le Glaucome Congenitalferhat.rahmaPas encore d'évaluation
- Anatomie Colon Et GreleDocument66 pagesAnatomie Colon Et GreleEla saadallahPas encore d'évaluation
- Elasticity en 2D With Freefem++Document17 pagesElasticity en 2D With Freefem++Oukhouya Abdelwahab100% (1)
- Cfao 2013-2014 PDFDocument71 pagesCfao 2013-2014 PDFAl Cas75% (4)
- Stade Pheno Des Solanaceecs TomateDocument6 pagesStade Pheno Des Solanaceecs Tomatechadlikamal1315Pas encore d'évaluation
- Les Personnages de Phèdre de RacineDocument3 pagesLes Personnages de Phèdre de RacineRACHID CHELHIPas encore d'évaluation
- Cours Fao Ve33Document49 pagesCours Fao Ve33yasser lamyasserPas encore d'évaluation
- Devoir Non Surveill E: Probl' Eme - Une Equation Diff Erentielle D'ordre 2 ' A Coefficients Non ConstantsDocument2 pagesDevoir Non Surveill E: Probl' Eme - Une Equation Diff Erentielle D'ordre 2 ' A Coefficients Non ConstantsOsama LahyaniPas encore d'évaluation
- TEHNODIESEL Doo Hammer Rusenje ReciklazaDocument52 pagesTEHNODIESEL Doo Hammer Rusenje ReciklazaAhmer CamdzicPas encore d'évaluation
- Phases de Construction de Parc ÉolienDocument20 pagesPhases de Construction de Parc ÉolienBadr Eddin KriouachPas encore d'évaluation
- XTerra Tahiti 2016Document48 pagesXTerra Tahiti 2016Fred AliPas encore d'évaluation
- Charte Des Verts MondiauxDocument24 pagesCharte Des Verts Mondiauxedouard3923Pas encore d'évaluation
- Atelier Qualité Et MaintenanceDocument41 pagesAtelier Qualité Et MaintenanceGhofrane GhofranePas encore d'évaluation
- 1G23 - Exercice Dérivation Locale CorrectionDocument2 pages1G23 - Exercice Dérivation Locale CorrectionloukahoogenraadPas encore d'évaluation
- 14 - Le Module Cmath en Python - Yassine Ben SalahDocument15 pages14 - Le Module Cmath en Python - Yassine Ben SalahElmehdi HoummassPas encore d'évaluation
- FR LeavenLikeEvangelismDocument425 pagesFR LeavenLikeEvangelismBeka AsraPas encore d'évaluation
- Abc - 2Document1 pageAbc - 2Madhu100% (1)
- Hormone Et Régulation MasterDocument85 pagesHormone Et Régulation Mastermebarekwahida4Pas encore d'évaluation
- G e Moteur Cummins NT855Document4 pagesG e Moteur Cummins NT855hocine gherbiPas encore d'évaluation
- Cours Bus CANDocument38 pagesCours Bus CANWarpynew C.L.APas encore d'évaluation
- Organisation Du Gnome HumainDocument5 pagesOrganisation Du Gnome HumainMouad HiliaPas encore d'évaluation
- Fiche DD Critere 7dDocument5 pagesFiche DD Critere 7dRAZAFINDRAMARY SOLO DESIRÉPas encore d'évaluation
- Les Moulins de Mon Coeur Scan OKDocument10 pagesLes Moulins de Mon Coeur Scan OKdamPas encore d'évaluation
- El-Harrach - WikipédiaDocument18 pagesEl-Harrach - WikipédiaBouamara RédaPas encore d'évaluation
- Jacques CousteauDocument7 pagesJacques CousteauMacarenaPas encore d'évaluation
- Maths CM2 Période 4Document4 pagesMaths CM2 Période 4trapp39Pas encore d'évaluation
- Pompes Rotodynamiques: Présentation. DescriptionDocument11 pagesPompes Rotodynamiques: Présentation. Descriptionbsaid77Pas encore d'évaluation
- Cours TsDocument43 pagesCours TsVoundai Mahamat ValamdouPas encore d'évaluation
- La SouplesseDocument14 pagesLa SouplesselatifaPas encore d'évaluation