Vous aimerez peut-être aussi
- Chapitre 3Document13 pagesChapitre 3ABDESSALAM MOHAIMIPas encore d'évaluation
- Chapitre 3 Element BarreDocument72 pagesChapitre 3 Element BarreMohamed ZaharPas encore d'évaluation
- Chapitre 3 MCSDocument11 pagesChapitre 3 MCSahlemn666Pas encore d'évaluation
- DDStructures Chapitre 3 2020-2021Document8 pagesDDStructures Chapitre 3 2020-2021Jemai NourPas encore d'évaluation
- Chap 3Document12 pagesChap 3Farah FrgPas encore d'évaluation
- Cos TsontDocument2 pagesCos Tsontبن سبتي نورهانPas encore d'évaluation
- Chap III MDS Critères de ResistanceDocument29 pagesChap III MDS Critères de Resistanceamine amiPas encore d'évaluation
- Cours Chapitre 3 Transfert de Chaleur Et de Masse ApprofondisDocument20 pagesCours Chapitre 3 Transfert de Chaleur Et de Masse ApprofondisMohamed BelazilPas encore d'évaluation
- Chapitre 3 - Diagramme T Et MDocument12 pagesChapitre 3 - Diagramme T Et MHoussamHannadPas encore d'évaluation
- Cours MDR Chapitre IIIDocument26 pagesCours MDR Chapitre IIIDunill MafouoPas encore d'évaluation
- Contraintes Dans Les SolsDocument11 pagesContraintes Dans Les SolsMehdi HarouataPas encore d'évaluation
- Chapitre 3 - STDocument16 pagesChapitre 3 - STDeghboudj SamirPas encore d'évaluation
- Chapitre - 02 - Théorie de Létat de Contraintes - 2022 - M2 - StructureDocument24 pagesChapitre - 02 - Théorie de Létat de Contraintes - 2022 - M2 - StructureYounes DahPas encore d'évaluation
- Cours Dynamique Des StructuresDocument21 pagesCours Dynamique Des Structuresmohamedouffa67% (3)
- Chap III Tenseur DéformationDocument17 pagesChap III Tenseur DéformationmomoPas encore d'évaluation
- Chap 5 RDocument12 pagesChap 5 Ryolande patricia bekada massiaPas encore d'évaluation
- CHAPITRE III Oscillations Libres Amorties Des Systèmes À Un Seul Degré de Liberté PDFDocument6 pagesCHAPITRE III Oscillations Libres Amorties Des Systèmes À Un Seul Degré de Liberté PDFAbd El Basset ünkutPas encore d'évaluation
- zCHAPITRE 3 - Systemes OuvertsDocument9 pageszCHAPITRE 3 - Systemes Ouvertsjaafar ben abdelouahabPas encore d'évaluation
- Chapitre 03 - Méthode Des Forces 2018Document9 pagesChapitre 03 - Méthode Des Forces 2018rabehiPas encore d'évaluation
- Serie2 - Dynamique Des Structures 2020 2021 PDFDocument3 pagesSerie2 - Dynamique Des Structures 2020 2021 PDFMohamed ZakritiPas encore d'évaluation
- DynSystChap3 (Semi Infini)Document19 pagesDynSystChap3 (Semi Infini)Le Bateau De la RéussitePas encore d'évaluation
- chap 2 -Ecoulement Isentropopique-3Document41 pageschap 2 -Ecoulement Isentropopique-3Mãnęl GüzęllikPas encore d'évaluation
- Les Contraintes Et Déformation Engendrées Dans Les Poutres Par Les Éléments de RéductionDocument10 pagesLes Contraintes Et Déformation Engendrées Dans Les Poutres Par Les Éléments de RéductionRose EvaPas encore d'évaluation
- Modélisation Et Simulation de La Machine AsynchroneDocument13 pagesModélisation Et Simulation de La Machine AsynchroneKioua Med SedikPas encore d'évaluation
- DDStructures Chapitre 2 2020-2021Document24 pagesDDStructures Chapitre 2 2020-2021Jemai NourPas encore d'évaluation
- MMC - Chapitre 4 - MansouriDocument61 pagesMMC - Chapitre 4 - MansouriBitti FaskPas encore d'évaluation
- RMChap3 (Traction)Document40 pagesRMChap3 (Traction)ronaldtatmenundertakerPas encore d'évaluation
- MEF PoutreDocument9 pagesMEF PoutreAbdelmajid HmPas encore d'évaluation
- RMChap3 (Traction)Document32 pagesRMChap3 (Traction)Hervé BanouwinPas encore d'évaluation
- Chapitre IIIDocument18 pagesChapitre IIIfatma.mabroukiPas encore d'évaluation
- Chap03 DarachmentDocument16 pagesChap03 DarachmentAmine AminePas encore d'évaluation
- Chapitre - 3element FiniDocument29 pagesChapitre - 3element Finiismail2001.adyadouPas encore d'évaluation
- RMChap3 (Traction)Document35 pagesRMChap3 (Traction)Bouallegue MounirPas encore d'évaluation
- Serie3 - Dynamique Des Structures 2020 2021 PDFDocument2 pagesSerie3 - Dynamique Des Structures 2020 2021 PDFMohamed ZakritiPas encore d'évaluation
- Dchapitre 4Document13 pagesDchapitre 4Salma ElkaddouriPas encore d'évaluation
- TD2 2013Document2 pagesTD2 2013MD HM BCPas encore d'évaluation
- Chapitre 2Document18 pagesChapitre 2moha mbabiPas encore d'évaluation
- Chapitre 22Document14 pagesChapitre 22Belgacem SoltaniPas encore d'évaluation
- Chapitre 5 Théories Des États de Contraintes LimitesDocument10 pagesChapitre 5 Théories Des États de Contraintes LimitesRose Eva100% (1)
- Dimensionnement Des Poutres Isostatiques en Flexion ComposéeDocument18 pagesDimensionnement Des Poutres Isostatiques en Flexion ComposéeHhh HhjPas encore d'évaluation
- Cours Béton Précontraint Chapitre3 PDFDocument8 pagesCours Béton Précontraint Chapitre3 PDFWilliam KellerPas encore d'évaluation
- Cours RDM Chap3Document6 pagesCours RDM Chap3أشرف عبودPas encore d'évaluation
- Le FrottementDocument12 pagesLe FrottementGuy YgalPas encore d'évaluation
- Cours RDMDocument1 pageCours RDMOmar Ben SmailPas encore d'évaluation
- Cours 2Document2 pagesCours 2Hamid InekachPas encore d'évaluation
- ADRAOUI JAMILA - RemovedDocument8 pagesADRAOUI JAMILA - RemovedZAKARIA ELPas encore d'évaluation
- Tenseur Des Contraintes - WikipédiaDocument7 pagesTenseur Des Contraintes - WikipédiaAmjed LaritPas encore d'évaluation
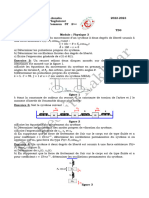
- Examene FINAL Physique 03 VF 2022Document2 pagesExamene FINAL Physique 03 VF 2022Omar langueurPas encore d'évaluation
- Beton 2Document10 pagesBeton 2chouaib.khemissiPas encore d'évaluation
- CH 22 Composites TDDocument13 pagesCH 22 Composites TDsaded05Pas encore d'évaluation
- TP de FlexionDocument14 pagesTP de FlexionHamza YahiaouiPas encore d'évaluation
- Chap LIDocument16 pagesChap LInabilshfPas encore d'évaluation
- Chapitre 4 Zone Plastique en Pointe de FissureDocument8 pagesChapitre 4 Zone Plastique en Pointe de FissureKith MhakaPas encore d'évaluation
- Chapitre 2 - Vibrations Des MachineDocument23 pagesChapitre 2 - Vibrations Des MachineMackenzie MoranPas encore d'évaluation
- Methode Elements Finis Chap3Document15 pagesMethode Elements Finis Chap3Laid ZaidounPas encore d'évaluation
- Chapitre 2Document25 pagesChapitre 2Belgacem SoltaniPas encore d'évaluation
- CH3 ET CH4 BETON ARME 2 DR MADI RAFIKDocument34 pagesCH3 ET CH4 BETON ARME 2 DR MADI RAFIKTarike Zohir100% (1)
- Chapitre 1Document13 pagesChapitre 1ABDESSALAM MOHAIMIPas encore d'évaluation
- Chapitre 1Document14 pagesChapitre 1ABDESSALAM MOHAIMIPas encore d'évaluation
- Chapitre4 PDFDocument7 pagesChapitre4 PDFSiŗ MèDoxPas encore d'évaluation
- Les Quatre Forces Du Vol - Parlons SciencesDocument10 pagesLes Quatre Forces Du Vol - Parlons SciencesABDESSALAM MOHAIMIPas encore d'évaluation
- Chapitre4 PDFDocument7 pagesChapitre4 PDFSiŗ MèDoxPas encore d'évaluation
- Rapport PFE - BOUJOU Mohamed-AmineDocument93 pagesRapport PFE - BOUJOU Mohamed-AmineABDESSALAM MOHAIMIPas encore d'évaluation
- Cours CND ENSAMDocument17 pagesCours CND ENSAMmahdiPas encore d'évaluation
- 02 Connaissance Des Materiels Et Documentation de Maintenance Mode de CompatibiliteDocument25 pages02 Connaissance Des Materiels Et Documentation de Maintenance Mode de CompatibiliteMakki ABDELLATIFPas encore d'évaluation
- EL Khaldi - EL MaaloufDocument55 pagesEL Khaldi - EL MaaloufABDESSALAM MOHAIMIPas encore d'évaluation
- Paysage-Version Final Réduction de Taux de Scrap Par Le Deploiement de La Démarche DMAICDocument7 pagesPaysage-Version Final Réduction de Taux de Scrap Par Le Deploiement de La Démarche DMAICABDESSALAM MOHAIMIPas encore d'évaluation
- Resumé Pfe Mohaimi AbdessalamDocument1 pageResumé Pfe Mohaimi AbdessalamABDESSALAM MOHAIMIPas encore d'évaluation
- Boubechra Amine CVDocument1 pageBoubechra Amine CVABDESSALAM MOHAIMIPas encore d'évaluation
- ACFrOgD2J0uLsZeS70ZgPBWdULAA8qi4sycisogEkRjlgyUh Hg8uUvCwMfIdDu4Eae9zbSo8rdMAsa5 kCsK0bpfamnJ4tUHkXEJXA2n - OAzGIFEWp6O Rjvupk2j0Document1 pageACFrOgD2J0uLsZeS70ZgPBWdULAA8qi4sycisogEkRjlgyUh Hg8uUvCwMfIdDu4Eae9zbSo8rdMAsa5 kCsK0bpfamnJ4tUHkXEJXA2n - OAzGIFEWp6O Rjvupk2j0ABDESSALAM MOHAIMIPas encore d'évaluation
- Pfe Réduction de Taux de Scrap Par Le Deploiement de La Démarche DMAICDocument105 pagesPfe Réduction de Taux de Scrap Par Le Deploiement de La Démarche DMAICABDESSALAM MOHAIMI50% (2)
- MEZRAG 2015 Archivage CorDocument203 pagesMEZRAG 2015 Archivage CorABDESSALAM MOHAIMIPas encore d'évaluation
- GénéraleDocument10 pagesGénéraleABDESSALAM MOHAIMIPas encore d'évaluation
- GUEDDADI Fatima Ezzahra Final GpeeDocument1 pageGUEDDADI Fatima Ezzahra Final GpeeABDESSALAM MOHAIMIPas encore d'évaluation
- CV Hajar Sarhani (1) (2) (1) (1) - 2Document1 pageCV Hajar Sarhani (1) (2) (1) (1) - 2ABDESSALAM MOHAIMIPas encore d'évaluation
- Elasticity en 2D With Freefem++Document17 pagesElasticity en 2D With Freefem++Oukhouya Abdelwahab100% (1)
- FR LeavenLikeEvangelismDocument425 pagesFR LeavenLikeEvangelismBeka AsraPas encore d'évaluation
- La Prise en Charge Des Nausées Et Vomissements de La GrossesseDocument2 pagesLa Prise en Charge Des Nausées Et Vomissements de La GrossesseAnna LiachenkoPas encore d'évaluation
- TD3 Chimie Generale +CORRIGE 2016-2017Document6 pagesTD3 Chimie Generale +CORRIGE 2016-2017Awatif BePas encore d'évaluation
- 1G23 - Exercice Dérivation Locale CorrectionDocument2 pages1G23 - Exercice Dérivation Locale CorrectionloukahoogenraadPas encore d'évaluation
- Cours Fao Ve33Document49 pagesCours Fao Ve33yasser lamyasserPas encore d'évaluation
- Peinture Industrie - Merged CorrectionDocument15 pagesPeinture Industrie - Merged CorrectionSoudani MoustafaPas encore d'évaluation
- Energie Cinitique Solutions Électrolytiques Prof - Ait Hissi (WWW - Pc1.ma)Document2 pagesEnergie Cinitique Solutions Électrolytiques Prof - Ait Hissi (WWW - Pc1.ma)medPas encore d'évaluation
- Cfao 2013-2014 PDFDocument71 pagesCfao 2013-2014 PDFAl Cas75% (4)
- Fiche DD Critere 7dDocument5 pagesFiche DD Critere 7dRAZAFINDRAMARY SOLO DESIRÉPas encore d'évaluation
- Charte Des Verts MondiauxDocument24 pagesCharte Des Verts Mondiauxedouard3923Pas encore d'évaluation
- Pompes Rotodynamiques: Présentation. DescriptionDocument11 pagesPompes Rotodynamiques: Présentation. Descriptionbsaid77Pas encore d'évaluation
- 14 - Le Module Cmath en Python - Yassine Ben SalahDocument15 pages14 - Le Module Cmath en Python - Yassine Ben SalahElmehdi HoummassPas encore d'évaluation
- G e Moteur Cummins NT855Document4 pagesG e Moteur Cummins NT855hocine gherbiPas encore d'évaluation
- El-Harrach - WikipédiaDocument18 pagesEl-Harrach - WikipédiaBouamara RédaPas encore d'évaluation
- Cours Bus CANDocument38 pagesCours Bus CANWarpynew C.L.APas encore d'évaluation
- Cned BTS Diet Doc FC22 1Document11 pagesCned BTS Diet Doc FC22 1Vincent VHPas encore d'évaluation
- Bulletin de L'académie Malgache VI - 1922Document504 pagesBulletin de L'académie Malgache VI - 1922AymericDM50% (4)
- Les Moulins de Mon Coeur Scan OKDocument10 pagesLes Moulins de Mon Coeur Scan OKdamPas encore d'évaluation
- Mesure Vibratoire en Niveau Global PDFDocument7 pagesMesure Vibratoire en Niveau Global PDFPatrick BeniePas encore d'évaluation
- Exercices - SondagesDocument23 pagesExercices - SondagesIssam Hamamid100% (2)
- These09 200914fev09Document45 pagesThese09 200914fev09api-19750751Pas encore d'évaluation
- La Puissance de L'humilité, Vivre Comme Jésus - R.T. KendallDocument120 pagesLa Puissance de L'humilité, Vivre Comme Jésus - R.T. KendallMukenga KapetaPas encore d'évaluation
- Les Personnages de Phèdre de RacineDocument3 pagesLes Personnages de Phèdre de RacineRACHID CHELHIPas encore d'évaluation
- Smontaggio Motore LevoDocument7 pagesSmontaggio Motore LevoShogun65Pas encore d'évaluation
- Organisation Du Gnome HumainDocument5 pagesOrganisation Du Gnome HumainMouad HiliaPas encore d'évaluation
- Phases de Construction de Parc ÉolienDocument20 pagesPhases de Construction de Parc ÉolienBadr Eddin KriouachPas encore d'évaluation
- 3 - Le Glaucome CongenitalDocument11 pages3 - Le Glaucome Congenitalferhat.rahmaPas encore d'évaluation
- XTerra Tahiti 2016Document48 pagesXTerra Tahiti 2016Fred AliPas encore d'évaluation
- Moteurs Cours 2 Cycles ThermodynamiquesDocument13 pagesMoteurs Cours 2 Cycles ThermodynamiqueskhaoulaPas encore d'évaluation
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieD'EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieÉvaluation : 5 sur 5 étoiles5/5 (2)
- Transformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitD'EverandTransformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitÉvaluation : 4 sur 5 étoiles4/5 (14)
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Approvisionnement et traitement de l’eau: Les Grands Articles d'UniversalisD'EverandApprovisionnement et traitement de l’eau: Les Grands Articles d'UniversalisPas encore d'évaluation
- La vie des abeilles: Prix Nobel de littératureD'EverandLa vie des abeilles: Prix Nobel de littératureÉvaluation : 4 sur 5 étoiles4/5 (41)
- Semer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumeD'EverandSemer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumePas encore d'évaluation
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- 160 ressources pour se lancer dans la vidéo quand on n’y connait rienD'Everand160 ressources pour se lancer dans la vidéo quand on n’y connait rienPas encore d'évaluation
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Enseigner une Langue Etrangère Par l’Apprentissage HybrideD'EverandEnseigner une Langue Etrangère Par l’Apprentissage HybridePas encore d'évaluation
- 500 secrets pour avoir un potager merveilleuxD'Everand500 secrets pour avoir un potager merveilleuxÉvaluation : 2 sur 5 étoiles2/5 (1)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Géologie de l'Amérique: Les Grands Articles d'UniversalisD'EverandGéologie de l'Amérique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Harmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020D'EverandHarmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Le B.A.-Ba de la communication: Comment convaincre, informer, séduire ?D'EverandLe B.A.-Ba de la communication: Comment convaincre, informer, séduire ?Évaluation : 3 sur 5 étoiles3/5 (1)
- Jus de Fruits et de Légumes Crus: 57 recettes faciles et un Guide Pratique Complet pour améliorer votre alimentation .: Santé, Vitalité et Minceur, avec ... ET DURABLEMENTD'EverandJus de Fruits et de Légumes Crus: 57 recettes faciles et un Guide Pratique Complet pour améliorer votre alimentation .: Santé, Vitalité et Minceur, avec ... ET DURABLEMENTPas encore d'évaluation