Vous aimerez peut-être aussi
- Corrige Td3 P&C Gcv2 IpsasDocument30 pagesCorrige Td3 P&C Gcv2 IpsasAmin Jamoussi50% (2)
- Ex1 TD1 CorrigeDocument3 pagesEx1 TD1 Corrigealmer100% (5)
- Corrige 05Document4 pagesCorrige 05Salma SoulaymaniPas encore d'évaluation
- Exercice Correction 1 WatermarkDocument10 pagesExercice Correction 1 WatermarkLeopold MokaPas encore d'évaluation
- CorrigéExamAnaComplexe2018-2019 (2)Document4 pagesCorrigéExamAnaComplexe2018-2019 (2)Ali brahim MahamatPas encore d'évaluation
- Chute Libre VerticaleDocument2 pagesChute Libre VerticalesigaussePas encore d'évaluation
- NYC - XXI - Chap 1.7Document7 pagesNYC - XXI - Chap 1.7amar arabiPas encore d'évaluation
- AutoDocument28 pagesAutoKodjovi Adjété AMETADJIPas encore d'évaluation
- 2015 CC Gcgeo CorrigeDocument7 pages2015 CC Gcgeo CorrigeKamel BousninaPas encore d'évaluation
- 2018 Cor Bac DDocument5 pages2018 Cor Bac DJosuéPas encore d'évaluation
- 2023 Reunion J1 Exo2 Correction TweenerLob 5ptsDocument2 pages2023 Reunion J1 Exo2 Correction TweenerLob 5ptslexsacha131Pas encore d'évaluation
- Examen 2017 2018 CorrectionDocument28 pagesExamen 2017 2018 CorrectionSimplicePas encore d'évaluation
- 2 OndesDocument13 pages2 OndesddouaPas encore d'évaluation
- Corrige Maths Bce Edhec 2020Document8 pagesCorrige Maths Bce Edhec 2020Diomande WilfriedPas encore d'évaluation
- Analyse Vectorielle Cours Et Exercices CorrigesDocument26 pagesAnalyse Vectorielle Cours Et Exercices Corrigesheritianarazafy2004Pas encore d'évaluation
- 0B W Sprn2GfpalJVTy1FM2FNNVkDocument2 pages0B W Sprn2GfpalJVTy1FM2FNNVkAsma BousamePas encore d'évaluation
- ds4 Ipest22 23 CorrigeDocument8 pagesds4 Ipest22 23 CorrigeYoussef MzabiPas encore d'évaluation
- Flambement CH 10Document7 pagesFlambement CH 10Abdelillah feghoulPas encore d'évaluation
- CorrectionexamDocument4 pagesCorrectionexamBamishola Aristide LOKEPas encore d'évaluation
- MDF Plan InclinéDocument2 pagesMDF Plan Inclinéyasmine baPas encore d'évaluation
- Algerie c Septembre 1992Document3 pagesAlgerie c Septembre 1992Adam EleuchPas encore d'évaluation
- Sec CCP 2001 Phy2c MPDocument8 pagesSec CCP 2001 Phy2c MPEl Amrani WassimPas encore d'évaluation
- Chapitre 03Document5 pagesChapitre 03andoPas encore d'évaluation
- 0B W Sprn2GfpV1lva0dTQmJoMVUDocument3 pages0B W Sprn2GfpV1lva0dTQmJoMVUAsma BousamePas encore d'évaluation
- Fiche td1Document20 pagesFiche td1houcine naimPas encore d'évaluation
- Cheat-Sheet Regression Avec RDocument1 pageCheat-Sheet Regression Avec RMohamedAliLakhouaja'hPas encore d'évaluation
- Corrige Serie4 CM 2020 2021Document9 pagesCorrige Serie4 CM 2020 2021somaya ehPas encore d'évaluation
- Formule Phys1Document3 pagesFormule Phys1Malak ElguessPas encore d'évaluation
- Révision1 - 2SMDocument6 pagesRévision1 - 2SMnhmeryPas encore d'évaluation
- Serie 9Document7 pagesSerie 9thiamauthentique7Pas encore d'évaluation
- Capes 2006 M2 CorrigeDocument14 pagesCapes 2006 M2 CorrigeNabil HananiPas encore d'évaluation
- Incontournables ElectromagnétismeDocument32 pagesIncontournables Electromagnétismeamirisarra18Pas encore d'évaluation
- TD Intcurvili CorDocument13 pagesTD Intcurvili CorImane KhaliPas encore d'évaluation
- Devoir 1 Maths 1er BAC Sciences Mathematiques 2nd Semestre Sections Internationales Option Francais Modele 5Document1 pageDevoir 1 Maths 1er BAC Sciences Mathematiques 2nd Semestre Sections Internationales Option Francais Modele 5Simo MouidPas encore d'évaluation
- Corrigé TD 02 DynamiqueDocument9 pagesCorrigé TD 02 DynamiqueelbiyatimanalPas encore d'évaluation
- Tpe SNLDocument6 pagesTpe SNLdilanho takamPas encore d'évaluation
- TD3 CorrectionDocument3 pagesTD3 Correctionkh4y3mPas encore d'évaluation
- Fic 00140Document3 pagesFic 00140MILAT MATHIEUPas encore d'évaluation
- MECA 1A 2-CorrDocument5 pagesMECA 1A 2-Corroussama azouiPas encore d'évaluation
- Correction EXamen 2023 SCDocument9 pagesCorrection EXamen 2023 SCmedamineeleuch98Pas encore d'évaluation
- Sds 2020-2021 ExDocument4 pagesSds 2020-2021 ExFatima-zahra NakroPas encore d'évaluation
- TD3 CorrectionDocument6 pagesTD3 CorrectionYassine BibotPas encore d'évaluation
- 83190366Document9 pages83190366Hmadna AymanePas encore d'évaluation
- SMPC Sol Ex6 Serie1 Algebre1 2020 2021Document2 pagesSMPC Sol Ex6 Serie1 Algebre1 2020 2021Zaka RiaPas encore d'évaluation
- UntitledDocument3 pagesUntitledSofia SofiaPas encore d'évaluation
- Integral CPDocument2 pagesIntegral CPawayombe2021Pas encore d'évaluation
- PharmaDocument6 pagesPharmamhzpv82h6gPas encore d'évaluation
- Fonctions de Plusieurs VariablesDocument2 pagesFonctions de Plusieurs VariablesDavy NzaouPas encore d'évaluation
- Giroux Solutions 4.3Document3 pagesGiroux Solutions 4.3Yannick DsprbsPas encore d'évaluation
- x = α cos (ω t) y = β sin (ω t) : Donner l'expression de la coordonnéeDocument2 pagesx = α cos (ω t) y = β sin (ω t) : Donner l'expression de la coordonnéePépito de la PépitaPas encore d'évaluation
- Chapitre 7Document25 pagesChapitre 7sfwbx6wdz9Pas encore d'évaluation
- Exercice 1: Fgses MEQ 2023-2024Document2 pagesExercice 1: Fgses MEQ 2023-2024Islani AbdessamadPas encore d'évaluation
- Présentation Et Étude de La Fonction ArctanDocument2 pagesPrésentation Et Étude de La Fonction Arctananas achmitPas encore d'évaluation
- Corrigé Ds 2016 QuantiqueDocument10 pagesCorrigé Ds 2016 Quantiqueaymane85Pas encore d'évaluation
- Corrige Polynesie 13 Mars 2023 DVDocument5 pagesCorrige Polynesie 13 Mars 2023 DVposax67640Pas encore d'évaluation
- Applications Line AiresDocument10 pagesApplications Line AiresMed RhaiouzPas encore d'évaluation
- Electro3 Ondes Planes ÉlectromagnétiquesDocument20 pagesElectro3 Ondes Planes ÉlectromagnétiquesAhmad CisséPas encore d'évaluation
- Tom DS5corDocument27 pagesTom DS5corMax LerayPas encore d'évaluation
- Corrige 01Document7 pagesCorrige 01lahmar habibPas encore d'évaluation
- Extrait 42172210Document75 pagesExtrait 42172210Leopold MokaPas encore d'évaluation
- Guide Reconquete Des Ilots Anciens Degrades 0Document154 pagesGuide Reconquete Des Ilots Anciens Degrades 0Leopold MokaPas encore d'évaluation
- Livre - Blanc - Marches Et Concessions de Travaux PublicsDocument25 pagesLivre - Blanc - Marches Et Concessions de Travaux PublicsLeopold MokaPas encore d'évaluation
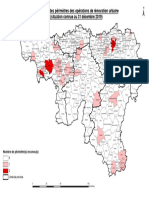
- Carte Perimetres RUDocument1 pageCarte Perimetres RULeopold MokaPas encore d'évaluation
- Veille Modeles TypesDocument2 pagesVeille Modeles TypesLeopold MokaPas encore d'évaluation
- RP 52969 FRDocument200 pagesRP 52969 FRbulgo abelPas encore d'évaluation
- Methodologie Tournier RapportDocument39 pagesMethodologie Tournier RapportTantely RazafimahatratraPas encore d'évaluation
- Rapport de Presentation Des Resultats 2005Document67 pagesRapport de Presentation Des Resultats 2005rainer siegfried simoPas encore d'évaluation
- Technique Beton Accessoires de Coffrages 2018Document80 pagesTechnique Beton Accessoires de Coffrages 2018TRAN DANG HAIPas encore d'évaluation
- 0B W Sprn2GfpalJVTy1FM2FNNVkDocument2 pages0B W Sprn2GfpalJVTy1FM2FNNVkAsma BousamePas encore d'évaluation
- 16-2-Catalogue Structures Dimension - Chaussees PDFDocument40 pages16-2-Catalogue Structures Dimension - Chaussees PDFcherquiPas encore d'évaluation
- 2016 CC GcgeoDocument3 pages2016 CC GcgeoKamel BousninaPas encore d'évaluation
- MMC 2008 Session-1Document2 pagesMMC 2008 Session-1Leopold MokaPas encore d'évaluation
- 0B W Sprn2GfpNmZmZjA5OGItNjRmMC00NWNmLTg2NjYtOGM3NTk3ODUyYjg5Document3 pages0B W Sprn2GfpNmZmZjA5OGItNjRmMC00NWNmLTg2NjYtOGM3NTk3ODUyYjg5Asma BousamePas encore d'évaluation
- Corrige MMC L3 2011S2Document4 pagesCorrige MMC L3 2011S2Leopold MokaPas encore d'évaluation
- Profil de CompetencesDocument32 pagesProfil de CompetencesAmineHadjout100% (1)
- Fuites de Capitaux Et Flux Illicites en Afrique PDFDocument276 pagesFuites de Capitaux Et Flux Illicites en Afrique PDFLolaPas encore d'évaluation
- Projet Urbain, Guide Méthodologique. Volume 2: Comprendre La Démarche Du Projet UrbainDocument9 pagesProjet Urbain, Guide Méthodologique. Volume 2: Comprendre La Démarche Du Projet UrbainSaid MalekkkPas encore d'évaluation
- Loi Urbanisme CamerounDocument24 pagesLoi Urbanisme Camerounshingo YabukiPas encore d'évaluation
- Anna 615 1087Document34 pagesAnna 615 1087Leopold MokaPas encore d'évaluation
- Murb ADocument2 pagesMurb AEmmanuel FrancisPas encore d'évaluation
- Cours Temps Unitaires Preparation ChantierDocument6 pagesCours Temps Unitaires Preparation ChantierYasser Redjem100% (2)
- Plan Gestion NuisiblesDocument77 pagesPlan Gestion NuisiblesLeopold MokaPas encore d'évaluation
- TD 1 Solutions 2021Document6 pagesTD 1 Solutions 2021nasrozagridPas encore d'évaluation
- Cours 2023-03-06 15 - 41 - 18Document6 pagesCours 2023-03-06 15 - 41 - 18kk2pk4mr4mPas encore d'évaluation
- Correction de La Série I Mécanique Du Point CUAM .M.elouardiDocument6 pagesCorrection de La Série I Mécanique Du Point CUAM .M.elouardiJeanPas encore d'évaluation
- Cours L1 PC Le théorà Me de GaussDocument9 pagesCours L1 PC Le théorà Me de GaussBUCAPÉ PREMIERPas encore d'évaluation
- 11 Geometrie Dans L'espaceDocument9 pages11 Geometrie Dans L'espacebaissane101Pas encore d'évaluation
- Produit Scalaire (Profs)Document14 pagesProduit Scalaire (Profs)jean dfdszxPas encore d'évaluation
- 07 Exos Prod Scalaire Geo RepereeDocument10 pages07 Exos Prod Scalaire Geo RepereeVitaliy BushuevPas encore d'évaluation
- C4CONTRAINTESFINALBIS2020Final 1Document27 pagesC4CONTRAINTESFINALBIS2020Final 1Bigue SowPas encore d'évaluation
- (Comprendre) Autodesk Robot Structural Analysis - Les Conventions de Signes - Village BIMDocument9 pages(Comprendre) Autodesk Robot Structural Analysis - Les Conventions de Signes - Village BIMdan BeaulandaPas encore d'évaluation
- Géométrie Des Courbes - Courbes en Coordonnées CartésiennesDocument9 pagesGéométrie Des Courbes - Courbes en Coordonnées Cartésiennesimane kadiriPas encore d'évaluation
- Chapitre 2 - Théorie de Létat de de ContraintesDocument36 pagesChapitre 2 - Théorie de Létat de de ContraintesNaima NaPas encore d'évaluation
- TC Maths Leçon 05 Géometrie Analytique de LespaceDocument14 pagesTC Maths Leçon 05 Géometrie Analytique de LespaceTraore AdamaPas encore d'évaluation
- Ch12 CalculDiffCourbSurfDocument8 pagesCh12 CalculDiffCourbSurfhala shooowPas encore d'évaluation
- TD08Document1 pageTD08SiGros MorellePas encore d'évaluation
- Espace TS3Document10 pagesEspace TS3Yuba HammouchePas encore d'évaluation
- Champ ElectrostatiqueDocument29 pagesChamp ElectrostatiqueSd instruPas encore d'évaluation
- Cours Du Produit Scalaire 2bac PCDocument11 pagesCours Du Produit Scalaire 2bac PCapi-302372012Pas encore d'évaluation
- Determiner L Intersection de Deux Plans 1Document19 pagesDeterminer L Intersection de Deux Plans 1saucissondu93Pas encore d'évaluation
- Cours Espace 1Document4 pagesCours Espace 1Feker BelguithPas encore d'évaluation
- TDPH M 04 CDocument12 pagesTDPH M 04 CAFADPas encore d'évaluation
- Calcul VectorielleDocument4 pagesCalcul VectorielleOrdinateur Neuf Accessoire CamerounPas encore d'évaluation
- Integrales de SurfaceDocument28 pagesIntegrales de Surfacebouchaib12345Pas encore d'évaluation
- Paul - Milan 1ere - Cours Géométrie RepéréeDocument3 pagesPaul - Milan 1ere - Cours Géométrie RepéréecgeuiPas encore d'évaluation
- Chapitre 10 Intégrale de Surface-Théorèmes IntégrauxDocument156 pagesChapitre 10 Intégrale de Surface-Théorèmes IntégrauxSelma Seniorita100% (2)
- Géométrie de L'espace Exercices-8Document22 pagesGéométrie de L'espace Exercices-8BenmehidiBatallPas encore d'évaluation
- Resume Cour MathDocument10 pagesResume Cour MathSaiyef CaesarPas encore d'évaluation
- Mécanique TD1Document2 pagesMécanique TD1MajdolinePas encore d'évaluation
- Géométrie Dans L'espaceDocument2 pagesGéométrie Dans L'espacebahizoune47100% (1)
- Cours Magistraux de Mecanique Du Point - CopieDocument129 pagesCours Magistraux de Mecanique Du Point - CopieYoan Miguel TsangPas encore d'évaluation
- Résumé Du Chapitre 5 - Théorème de GaussDocument2 pagesRésumé Du Chapitre 5 - Théorème de GaussHicham noblePas encore d'évaluation