Vous aimerez peut-être aussi
- 3 - Code Défauts Des Machines CatDocument58 pages3 - Code Défauts Des Machines Catcherif88% (59)
- Mcu A Transmission de PuissanceDocument1 pageMcu A Transmission de PuissancesedmorabetPas encore d'évaluation
- Boite de VitessesDocument16 pagesBoite de VitessesGana100% (1)
- Transmission de Puissance Generalites 2011Document28 pagesTransmission de Puissance Generalites 2011bhsbhs19Pas encore d'évaluation
- Transmission de Puissance - GeneralitesDocument10 pagesTransmission de Puissance - Generalitesntayoub75% (4)
- Transmission Dde PuissanceDocument32 pagesTransmission Dde PuissanceAbi ClémentPas encore d'évaluation
- Cours TransmissionDocument9 pagesCours Transmissionlassaad hamrouniPas encore d'évaluation
- 32-Roue de FrictionDocument4 pages32-Roue de FrictionHamza Kerroum100% (2)
- Transmissions de Puissance PDFDocument6 pagesTransmissions de Puissance PDFKhaled SouaissaPas encore d'évaluation
- Chap. 0 - Généralités Sur Les OTP PDFDocument4 pagesChap. 0 - Généralités Sur Les OTP PDFDramane KeitaPas encore d'évaluation
- Ransmission Et/ Ou Transformation de Mouvement: DéfinitionDocument11 pagesRansmission Et/ Ou Transformation de Mouvement: DéfinitionCesar romainPas encore d'évaluation
- Untitled PDFDocument19 pagesUntitled PDFMouhcine Ben MoussaPas encore d'évaluation
- TR de P CoursDocument16 pagesTR de P CoursomatrPas encore d'évaluation
- ENGRENAGESDocument54 pagesENGRENAGESjaafar alPas encore d'évaluation
- Crs Loi Entree Sortie Mecanisme TransmissionDocument4 pagesCrs Loi Entree Sortie Mecanisme TransmissionRamzi RamziPas encore d'évaluation
- 02 MECA0444-EffortsTransmission PDFDocument64 pages02 MECA0444-EffortsTransmission PDFKhaled SouaissaPas encore d'évaluation
- poly-MATHB PROF2 129Document56 pagespoly-MATHB PROF2 129brhamza39Pas encore d'évaluation
- Cours Trans MVT 2017 V1 PDFDocument3 pagesCours Trans MVT 2017 V1 PDFsabeurPas encore d'évaluation
- Chapitre 10 Les EngrenagesDocument10 pagesChapitre 10 Les Engrenagesben salem Naofel100% (1)
- Transformation de MVT PDFDocument4 pagesTransformation de MVT PDFbilal chekhabPas encore d'évaluation
- Facicule Construction M4caniqueDocument101 pagesFacicule Construction M4caniqueJean CorreaPas encore d'évaluation
- Doc1-Transmission Par EngrenageDocument26 pagesDoc1-Transmission Par EngrenageJã Wād SnüPas encore d'évaluation
- Cours - EngrenagesDocument21 pagesCours - EngrenagesYanis KemounPas encore d'évaluation
- Cours Transformation de MouvementDocument10 pagesCours Transformation de MouvementAsma MoussaPas encore d'évaluation
- Fonction ElementsDocument5 pagesFonction ElementsMohammed DahbiPas encore d'évaluation
- Transmission de MouvementDocument111 pagesTransmission de Mouvementboujbal100% (2)
- CH05 Mécanisme de Transmission Du MouvementDocument8 pagesCH05 Mécanisme de Transmission Du Mouvementmouf zerargaPas encore d'évaluation
- Généralités: Avec Ou SansDocument10 pagesGénéralités: Avec Ou Sansmohamed bananePas encore d'évaluation
- Transmission Et Transformation de Mouvements: 1 Caractéristiques D'un MouvementDocument6 pagesTransmission Et Transformation de Mouvements: 1 Caractéristiques D'un Mouvementbilal chekhabPas encore d'évaluation
- Transformation de MouvementDocument3 pagesTransformation de MouvementBassem Bhiri100% (1)
- Chap3 La Boite de VitessesDocument31 pagesChap3 La Boite de VitessesDavidPas encore d'évaluation
- Transmission de Puissance Engreages 2 Bac Science DingenieurDocument7 pagesTransmission de Puissance Engreages 2 Bac Science Dingenieursimo2015100% (1)
- Conception Mécanique - Les Systèmes de Transformation de MouvementDocument4 pagesConception Mécanique - Les Systèmes de Transformation de Mouvementrabah maherPas encore d'évaluation
- Système de Transmission Mécanique 2016Document59 pagesSystème de Transmission Mécanique 2016mahmoudmain_24273317100% (1)
- Cours Transmission de Mouvements-2Document14 pagesCours Transmission de Mouvements-2Hassan HallaouaPas encore d'évaluation
- Transmission de Puissance PDFDocument59 pagesTransmission de Puissance PDFsamah drissi el bouzaidiPas encore d'évaluation
- Présentation Cours Engrenages 2016-2017 PDFDocument65 pagesPrésentation Cours Engrenages 2016-2017 PDFMouaad AlouaniPas encore d'évaluation
- Formulaire de MecaniqueDocument5 pagesFormulaire de MecaniquehechmichermitiPas encore d'évaluation
- Transmettre L'énergie Mécanique - RESUMEDocument14 pagesTransmettre L'énergie Mécanique - RESUMEMed Reda BjijPas encore d'évaluation
- Variation VitesseDocument6 pagesVariation VitessePatrick_mx100% (2)
- TD5 Méc Trans Puis - Liens FlexiblesDocument6 pagesTD5 Méc Trans Puis - Liens Flexiblesskanderz408Pas encore d'évaluation
- Présentation Cours Engrenages - Doc ProfDocument8 pagesPrésentation Cours Engrenages - Doc ProfNedrosat89% (9)
- Cours Systemes de Transmission de MouvementDocument5 pagesCours Systemes de Transmission de MouvementdjalikadjouPas encore d'évaluation
- Accessoires de Transmission Et de Transformation Du MouvementDocument43 pagesAccessoires de Transmission Et de Transformation Du MouvementmarouanePas encore d'évaluation
- Chapitre 1,1Document30 pagesChapitre 1,1mezyan reggaiPas encore d'évaluation
- Cours - Transmission - de - Mouvements-2 (Recovered 1) PDFDocument14 pagesCours - Transmission - de - Mouvements-2 (Recovered 1) PDFAbdelmajid AittalebPas encore d'évaluation
- Présentation 5Document43 pagesPrésentation 5fazfrito lacaviataPas encore d'évaluation
- Cours Roues de Friction Poulies Et Courroies Roues Et ChainesDocument7 pagesCours Roues de Friction Poulies Et Courroies Roues Et ChainesC'est YanaPas encore d'évaluation
- Les Freins Et Les Embrayages - PrésentationDocument14 pagesLes Freins Et Les Embrayages - PrésentationHajar GhaziPas encore d'évaluation
- ChapitreVI Transmission de MVT PDFDocument29 pagesChapitreVI Transmission de MVT PDFsabeurPas encore d'évaluation
- Transmission de PuissanceDocument19 pagesTransmission de PuissanceAVEGUEPas encore d'évaluation
- Variat PDFDocument9 pagesVariat PDFsoufiane8fkaPas encore d'évaluation
- Transmission de Puissance - ProfDocument12 pagesTransmission de Puissance - ProfSewa MensahPas encore d'évaluation
- Les EngrenagesDocument10 pagesLes Engrenagessouheil_souPas encore d'évaluation
- Reduct EursDocument10 pagesReduct EursgokoPas encore d'évaluation
- Transmission de PuissanceDocument19 pagesTransmission de PuissanceAssane FallPas encore d'évaluation
- TransmissionDocument30 pagesTransmissionhassanidbouhaddou45Pas encore d'évaluation
- T M VDocument13 pagesT M VMed Amine HattakiPas encore d'évaluation
- REF BacPro CAeronautique2015 1Document181 pagesREF BacPro CAeronautique2015 1sedmorabetPas encore d'évaluation
- Gaz Parfaits Thermodynamique ExercicesDocument7 pagesGaz Parfaits Thermodynamique Exercicessedmorabet100% (1)
- Résumer Chaine Énergie Elec ADCDocument22 pagesRésumer Chaine Énergie Elec ADCsedmorabetPas encore d'évaluation
- Bielle-Manivelle - SujetDocument1 pageBielle-Manivelle - SujetsedmorabetPas encore d'évaluation
- Etude Energetique Du Winch LewmarDocument14 pagesEtude Energetique Du Winch LewmarsedmorabetPas encore d'évaluation
- Bielle-Manivelle - CorrigéDocument1 pageBielle-Manivelle - CorrigésedmorabetPas encore d'évaluation
- Triangle de SierpinskiDocument2 pagesTriangle de SierpinskisedmorabetPas encore d'évaluation
- SysML CoursDocument14 pagesSysML CourssedmorabetPas encore d'évaluation
- 101 Defis Maths SolutionsDocument103 pages101 Defis Maths SolutionssedmorabetPas encore d'évaluation
- Convertisseurs-Statiques Par WWW Cours-Electro PDFDocument4 pagesConvertisseurs-Statiques Par WWW Cours-Electro PDFsedmorabetPas encore d'évaluation
- ExerciceDocument8 pagesExercicesedmorabetPas encore d'évaluation
- Robot 6 AxesDocument2 pagesRobot 6 AxessedmorabetPas encore d'évaluation
- Revision BAC TSTI2D v1 PDFDocument12 pagesRevision BAC TSTI2D v1 PDFsedmorabetPas encore d'évaluation
- OuvreportailstatiqueSTI2011 10 17Document5 pagesOuvreportailstatiqueSTI2011 10 17sedmorabetPas encore d'évaluation
- Stage ALGO - 2-Me Partie - Enonces Des Exercices PDFDocument9 pagesStage ALGO - 2-Me Partie - Enonces Des Exercices PDFsedmorabetPas encore d'évaluation
- Liaisonsmcaniques 150227135446 Conversion Gate01Document5 pagesLiaisonsmcaniques 150227135446 Conversion Gate01sedmorabet100% (2)
- Rapport P6-3 2009 41Document39 pagesRapport P6-3 2009 41sedmorabetPas encore d'évaluation
- Catalogue DauphineDocument40 pagesCatalogue DauphinebigdutchmanfgPas encore d'évaluation
- Gran Baristo Class Parts DiagramDocument9 pagesGran Baristo Class Parts Diagrameddystoel2653100% (1)
- Elect m8 2014Document93 pagesElect m8 2014Hamza BeninePas encore d'évaluation
- CHAPITRE-4 Commande VectorielleDocument15 pagesCHAPITRE-4 Commande Vectoriellechersavan1100% (12)
- Ssp464 - F (L'Amarok Transmission Et Concept de Propulsion)Document60 pagesSsp464 - F (L'Amarok Transmission Et Concept de Propulsion)Auto repair diagnostic cars / trucksPas encore d'évaluation
- Chapitre I Les Fonctions Mécaniques Élémentaires: 1. La LiaisonDocument18 pagesChapitre I Les Fonctions Mécaniques Élémentaires: 1. La Liaisonhello youPas encore d'évaluation
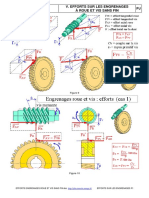
- Efforts Engrenages Roue Et Vis Sans FinDocument3 pagesEfforts Engrenages Roue Et Vis Sans FinBoris Cathérin Vidjannagni DOHOUPas encore d'évaluation
- Catalogue RoulementDocument82 pagesCatalogue RoulementAkram Ferchichi100% (1)
- Distribution BMNDocument19 pagesDistribution BMNqperfrdvPas encore d'évaluation
- MSAPDocument162 pagesMSAPanita100% (1)
- de Pfa 2021Document44 pagesde Pfa 2021Taoufik LeghrisPas encore d'évaluation
- DevisDocument1 pageDevissergis9servicesPas encore d'évaluation
- Griffe de Tour AnalyseDocument21 pagesGriffe de Tour AnalyseSobour AKANDEPas encore d'évaluation
- Chapitre 3 Les Procedes de Demarrage PDFDocument22 pagesChapitre 3 Les Procedes de Demarrage PDFElyes Issaoui100% (2)
- Devidoir A Alimentation Axiale-1Document2 pagesDevidoir A Alimentation Axiale-1jess286Pas encore d'évaluation
- F650GS-Manuel D'atelier (FR)Document307 pagesF650GS-Manuel D'atelier (FR)tulewicz jean pierre100% (1)
- Direction Et SuspDocument70 pagesDirection Et SuspBoutahri Mostafa100% (1)
- S108 RéfrigérationDocument5 pagesS108 RéfrigérationBenouni ZouhairPas encore d'évaluation
- Terminer KhaledDocument10 pagesTerminer KhaledKhaled BouzidiPas encore d'évaluation
- Technik Fresh Water Hand PumpDocument9 pagesTechnik Fresh Water Hand PumpfirdPas encore d'évaluation
- EngrenageDocument33 pagesEngrenagechaouch.najehPas encore d'évaluation
- DieselcommunrailDocument5 pagesDieselcommunrailKhalid Bel100% (1)
- Cours Robot 14Document119 pagesCours Robot 14Wasma HaniniPas encore d'évaluation
- TP 20 - Modélisation Et Étude Cinématique (OUVRE PORTAIL AVIDSEN) REDIER CyrilDocument12 pagesTP 20 - Modélisation Et Étude Cinématique (OUVRE PORTAIL AVIDSEN) REDIER CyrilCyril REDIERPas encore d'évaluation
- 20jjuy R eDocument18 pages20jjuy R esitescompte4Pas encore d'évaluation
- Guidage-En-Rotation-Exercices (8) - Page53 PDFDocument10 pagesGuidage-En-Rotation-Exercices (8) - Page53 PDFKhaled Mahjoub100% (2)
- Prã©paration Concours 2020 Cinã©matique Des Solides FormulaireDocument12 pagesPrã©paration Concours 2020 Cinã©matique Des Solides FormulaireNowe AhmadePas encore d'évaluation
- TP Freinage Corrigé1Document4 pagesTP Freinage Corrigé1LOVELYNE ZEBAZEPas encore d'évaluation
- Catalogo MotoresDocument2 pagesCatalogo MotoresJesus LizarazoPas encore d'évaluation