Vous aimerez peut-être aussi
- Corrigé Du Control Continu 01 en Mécanique Analytique2019-2020Document9 pagesCorrigé Du Control Continu 01 en Mécanique Analytique2019-2020Moulay ZoubirPas encore d'évaluation
- Résumé CinétiqueDocument11 pagesRésumé CinétiqueAB lifestylePas encore d'évaluation
- Cinétique - Solide - Chapitre 2Document18 pagesCinétique - Solide - Chapitre 2HaniPas encore d'évaluation
- Applications Des Lois de Newton Les Mouvements PlansDocument8 pagesApplications Des Lois de Newton Les Mouvements PlansArmand FofePas encore d'évaluation
- Dynamique de Rotation PDFDocument11 pagesDynamique de Rotation PDFNouhaila InnanPas encore d'évaluation
- Nath 1Document10 pagesNath 1rlothbrok324Pas encore d'évaluation
- ForcecentraleDocument11 pagesForcecentralelilia Bennaceur FarahPas encore d'évaluation
- TS1819 02 CorDocument3 pagesTS1819 02 CorOthmane GassabPas encore d'évaluation
- Rappel MathematiqueDocument2 pagesRappel Mathematiquemina boucPas encore d'évaluation
- Compte Rendu - TP - Mécanique Des Solides RigidesDocument22 pagesCompte Rendu - TP - Mécanique Des Solides Rigidessoulaimane lafhalPas encore d'évaluation
- Cours CinématiqueDocument8 pagesCours CinématiqueAsyncrite BAKASSA100% (1)
- Équations de Navier StokesDocument11 pagesÉquations de Navier StokeswatsopPas encore d'évaluation
- Chapitre - 1 - Partie3 - Régime HarmoniqueDocument17 pagesChapitre - 1 - Partie3 - Régime Harmoniqueelectroniquepfe04Pas encore d'évaluation
- Interrogation de Module Propagation Et AntenneDocument8 pagesInterrogation de Module Propagation Et AntenneBrahim LeguebedjPas encore d'évaluation
- °°cours Mecanique Solide Fsa-Agadir SMP3 21-22 PDFDocument50 pages°°cours Mecanique Solide Fsa-Agadir SMP3 21-22 PDFAkerkouch OmarPas encore d'évaluation
- Série 2 - BDocument14 pagesSérie 2 - Bessadikine anassPas encore d'évaluation
- Lecon Phy 2 (Prof)Document4 pagesLecon Phy 2 (Prof)Bahcin Ait OumgharPas encore d'évaluation
- Chapitre IDocument18 pagesChapitre IMamadou BambaPas encore d'évaluation
- Chap - I - Moment Cinètique (Enregistrement Automatique)Document16 pagesChap - I - Moment Cinètique (Enregistrement Automatique)Wissal RoumayssaePas encore d'évaluation
- TD1 PHONON SolutionDocument8 pagesTD1 PHONON SolutionAbde NidPas encore d'évaluation
- 1 Mouement de Rotation PDFDocument13 pages1 Mouement de Rotation PDFHamza KachkachiPas encore d'évaluation
- Chapitre 0 LET52Document7 pagesChapitre 0 LET52zakdanseurPas encore d'évaluation
- Chapitre VIDocument14 pagesChapitre VIAchiaou FahdPas encore d'évaluation
- Examen1 Théorie Du ChampDocument3 pagesExamen1 Théorie Du ChampGACEM KARIMPas encore d'évaluation
- Correction TD5 CHAMP MAGNETOSTATIQUEDocument6 pagesCorrection TD5 CHAMP MAGNETOSTATIQUEnadinerjaibi15Pas encore d'évaluation
- Traqueur Du Soleil (Corrigé)Document5 pagesTraqueur Du Soleil (Corrigé)bhasalma220Pas encore d'évaluation
- Serie Energie de Def1Document9 pagesSerie Energie de Def1Bouchra AskriPas encore d'évaluation
- R Sum Ondes Et Vibrations FRDocument2 pagesR Sum Ondes Et Vibrations FRahmed ahmadPas encore d'évaluation
- °°cours Mecanique Solide Fsa-Agadir SMP3 20-21 PDFDocument37 pages°°cours Mecanique Solide Fsa-Agadir SMP3 20-21 PDFAkerkouch OmarPas encore d'évaluation
- Correction-Exo-3-TD No-3-SMI-S1-ABDocument5 pagesCorrection-Exo-3-TD No-3-SMI-S1-ABAbdel ouameurPas encore d'évaluation
- Cinétique Des Solides 22 1Document13 pagesCinétique Des Solides 22 1Chacha ZapPas encore d'évaluation
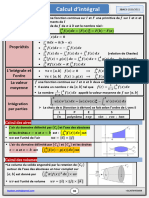
- Calcul IntegralDocument1 pageCalcul IntegralAbdelKarim dergoulPas encore d'évaluation
- Compte Rendu TP3 Mecanique Du Solide PDFDocument10 pagesCompte Rendu TP3 Mecanique Du Solide PDFAshraf Med80% (5)
- Solution+Examen Mécanique Du Solide 2023Document4 pagesSolution+Examen Mécanique Du Solide 2023King Strong BoyPas encore d'évaluation
- Cinématique 2021 2022 F Chouia 3Document25 pagesCinématique 2021 2022 F Chouia 3Minàà Lyèèèn 1Pas encore d'évaluation
- Correction de L - Exercice N°7 de La Série N°4Document6 pagesCorrection de L - Exercice N°7 de La Série N°4Karim KisserliPas encore d'évaluation
- Chap1 Mecanique - Conditions D'équilibre BCPST2Document5 pagesChap1 Mecanique - Conditions D'équilibre BCPST2Ariel AdepoPas encore d'évaluation
- Exercice 10-Série N°5 (Dynamique)Document7 pagesExercice 10-Série N°5 (Dynamique)aminemimou647Pas encore d'évaluation
- Chapitre Geométrie de MasseDocument26 pagesChapitre Geométrie de MasseNEXOPas encore d'évaluation
- OD2 - TDC - Ondes - Acoustiques 7Document1 pageOD2 - TDC - Ondes - Acoustiques 7rachid idrissiPas encore d'évaluation
- TD1 CorrectionDocument8 pagesTD1 CorrectionDaoud ElalouanyPas encore d'évaluation
- MPSI-Mecanique-Cinematique AnalytiqueDocument27 pagesMPSI-Mecanique-Cinematique AnalytiqueimadPas encore d'évaluation
- Méthodes Économétriques Séance Du 25032020 - Hafid El HassaniDocument6 pagesMéthodes Économétriques Séance Du 25032020 - Hafid El HassanimidoPas encore d'évaluation
- Circuits Électriques en Régime Sinusoidale220565Document6 pagesCircuits Électriques en Régime Sinusoidale220565mokchaha.ahmedPas encore d'évaluation
- Outils Mathématiques Pour La PhysiqueDocument3 pagesOutils Mathématiques Pour La Physiquevnguema8Pas encore d'évaluation
- 4.1correction - Sã© Rie - 6 - Cinã© Matique Du SolideDocument10 pages4.1correction - Sã© Rie - 6 - Cinã© Matique Du SolideHossam NajibPas encore d'évaluation
- Rotation D Un Solide Indeformable Autour D Un Axe Fixe CoursDocument10 pagesRotation D Un Solide Indeformable Autour D Un Axe Fixe Coursphytanja100% (1)
- Formulaire DDS1Document2 pagesFormulaire DDS1Midou MhmdPas encore d'évaluation
- Corrige TD 3-StatiqueDocument5 pagesCorrige TD 3-Statiquebelkacem2005anasPas encore d'évaluation
- Corrigé EXO1 2 RappelsDocument2 pagesCorrigé EXO1 2 RappelsSmatii DjamelPas encore d'évaluation
- TD1 - Physique Des Vibrations - CorrectionDocument7 pagesTD1 - Physique Des Vibrations - CorrectionMdzayd EL FahimePas encore d'évaluation
- Corrigé Examen PST - 10 Février 2022Document4 pagesCorrigé Examen PST - 10 Février 2022mayar mimiPas encore d'évaluation
- Tpstabilitéangufinal 1Document14 pagesTpstabilitéangufinal 1الشاكر لله100% (1)
- Cours RotationDocument2 pagesCours RotationbidaouimounirPas encore d'évaluation
- Equation de Saint-VenantDocument3 pagesEquation de Saint-Venantndn NgondzaPas encore d'évaluation
- Cour MS Ch3 Ch4 FinDocument68 pagesCour MS Ch3 Ch4 FinMeryem BOUZAROUTPas encore d'évaluation
- Solution-Examen1 Mécanique Des Fluides ApprofondieDocument2 pagesSolution-Examen1 Mécanique Des Fluides ApprofondieBrice GamintePas encore d'évaluation
- TD 2 MMCDocument3 pagesTD 2 MMCsouhayb elmanssouriPas encore d'évaluation
- Cours 1 Mouvement de Chute Verticale D'un SolideDocument4 pagesCours 1 Mouvement de Chute Verticale D'un Solideyassin bhPas encore d'évaluation
- 5-2 - Performances Des Machines Rotodynamiques - 2Document66 pages5-2 - Performances Des Machines Rotodynamiques - 2merouaneinconuPas encore d'évaluation
- Exo Cinematique CompletDocument10 pagesExo Cinematique CompletOumayma EttalbiPas encore d'évaluation
- 3419758Document91 pages3419758مفتاح الدينPas encore d'évaluation
- Circulaire 1934 Béton ArméDocument67 pagesCirculaire 1934 Béton ArméRicardo100% (1)
- Cours - CM - 2 - Chapitre - 2 - Bases de Dimensionnement Des Structures en Acier - 11 - 12Document127 pagesCours - CM - 2 - Chapitre - 2 - Bases de Dimensionnement Des Structures en Acier - 11 - 12molk kallel100% (1)
- Ilovepdf MergedDocument60 pagesIlovepdf MergedzerroukobeidaPas encore d'évaluation
- Controle SMP3 2016 17Document5 pagesControle SMP3 2016 17Aminos MaPas encore d'évaluation
- DS 8 2016Document8 pagesDS 8 2016Abderrahman MamouniPas encore d'évaluation
- Equilibrage Dynamique PDFDocument3 pagesEquilibrage Dynamique PDFMustafa MoussaouiPas encore d'évaluation
- ArbresDocument74 pagesArbresfernandtPas encore d'évaluation
- M104 Materiaux AeronautiqueDocument75 pagesM104 Materiaux AeronautiqueMOhmmed taawytPas encore d'évaluation
- Slides Robotique Master GSBDocument93 pagesSlides Robotique Master GSBLawrd RrafiePas encore d'évaluation
- Contraintes Dans Les SolsDocument6 pagesContraintes Dans Les SolsKarim GaussPas encore d'évaluation
- Exo Chapitre 3 Loi Comportement Milieux ContinusDocument8 pagesExo Chapitre 3 Loi Comportement Milieux ContinusDjelloul ReziniPas encore d'évaluation
- Révision ThermoappDocument58 pagesRévision ThermoappYoucef Abdellah Ayoub LaouidPas encore d'évaluation
- CNC Tsi 2016 Physique 1 EpreuveDocument10 pagesCNC Tsi 2016 Physique 1 Epreuveabderrahim najimPas encore d'évaluation
- Chargement Et ArrimageDocument56 pagesChargement Et ArrimageImpact Auto écolePas encore d'évaluation
- (Edm) (TD) Chaise D EscalierDocument2 pages(Edm) (TD) Chaise D EscalierJunior KamdemPas encore d'évaluation
- Poutre Rectangulaire EurocodeDocument54 pagesPoutre Rectangulaire EurocodeMario Feghali80% (5)
- DS1 2023Document7 pagesDS1 2023Saifeddine BrikiPas encore d'évaluation
- 208 Prehenseur CorrigeDocument4 pages208 Prehenseur CorrigeAhmed TalsiPas encore d'évaluation
- Méthodes de Calcul Des VoilesDocument29 pagesMéthodes de Calcul Des VoilesMøhamêd Noumari100% (1)
- Enoncés TP RDM l2 GMDocument30 pagesEnoncés TP RDM l2 GMjahidPas encore d'évaluation
- 1 AHLAFI Cours Infra RougeDocument33 pages1 AHLAFI Cours Infra RougeZerPas encore d'évaluation
- Aerodynamique de BaseDocument53 pagesAerodynamique de BaseAli ElmahaouiPas encore d'évaluation
- Exii 2Document3 pagesExii 2Narjiss ShimiPas encore d'évaluation
- Exercices Syst Oscillant TSM17 FRDocument19 pagesExercices Syst Oscillant TSM17 FRWin's Miringui'sPas encore d'évaluation
- Mécanique Du Solide-Chapitre1Document22 pagesMécanique Du Solide-Chapitre1Lengani Kader EvaricePas encore d'évaluation
- PRS Fbi 20130305 PDFDocument2 pagesPRS Fbi 20130305 PDFAnonymous cKbq4PMPas encore d'évaluation
- Cal Cul Elastoplast I QueDocument7 pagesCal Cul Elastoplast I QueHouda JaouaniPas encore d'évaluation