Vous aimerez peut-être aussi
- TD2 MM1 - PC1 - 2023 - 2024Document3 pagesTD2 MM1 - PC1 - 2023 - 2024alianisoinaanti2Pas encore d'évaluation
- Serie MecaDocument6 pagesSerie MecakongokuspPas encore d'évaluation
- Série de TD n2Document2 pagesSérie de TD n2Achiaou FahdPas encore d'évaluation
- Devoir D'essaiDocument1 pageDevoir D'essaiHamza BoutlihPas encore d'évaluation
- Premier Devoir (Ciné-Dyna)Document2 pagesPremier Devoir (Ciné-Dyna)eloijonathan0Pas encore d'évaluation
- Série N°4. Changement de Référentiel - Composition Des Mouvements (SMAI1) 2020-21Document2 pagesSérie N°4. Changement de Référentiel - Composition Des Mouvements (SMAI1) 2020-21AHMED ES-SAHELYPas encore d'évaluation
- TD Meca Point PC-MI 2023-2024Document5 pagesTD Meca Point PC-MI 2023-2024Adama Abdul Kader KAMBIREPas encore d'évaluation
- Premier Devoir 2020-2021 (Ciné-Dyna)Document2 pagesPremier Devoir 2020-2021 (Ciné-Dyna)eloijonathan0Pas encore d'évaluation
- Série de TD n3Document2 pagesSérie de TD n3Achiaou FahdPas encore d'évaluation
- °°cours Mecanique Solide Fsa-Agadir SMP3 21-22 PDFDocument50 pages°°cours Mecanique Solide Fsa-Agadir SMP3 21-22 PDFAkerkouch OmarPas encore d'évaluation
- °°cours Mecanique Solide Fsa-Agadir SMP3 20-21 PDFDocument37 pages°°cours Mecanique Solide Fsa-Agadir SMP3 20-21 PDFAkerkouch OmarPas encore d'évaluation
- "Examen" de Mécanique Des Solides Indéformables: Responsable Du Module: PR H. Ait RimouchDocument3 pages"Examen" de Mécanique Des Solides Indéformables: Responsable Du Module: PR H. Ait RimouchAlexis James0% (1)
- Contr1 S1 19-20 EnonceDocument3 pagesContr1 S1 19-20 EnonceahmedPas encore d'évaluation
- TD 2 MMCDocument3 pagesTD 2 MMCsouhayb elmanssouriPas encore d'évaluation
- Serie 04 Mecanique Du Point DynamiqueDocument1 pageSerie 04 Mecanique Du Point Dynamiquebew niiPas encore d'évaluation
- Séries N°1 Et 2 Du TD - Mécanique Du Point Matériel - 2022-2023-1Document2 pagesSéries N°1 Et 2 Du TD - Mécanique Du Point Matériel - 2022-2023-1Papa SeckPas encore d'évaluation
- TD Meca Du Point L1 MPI Serie3 2022Document3 pagesTD Meca Du Point L1 MPI Serie3 2022Bachir Mbaye100% (1)
- Série 5 MS 23-24Document3 pagesSérie 5 MS 23-24landry dossahPas encore d'évaluation
- Devoir MecaniqueDocument2 pagesDevoir MecaniquePreparation TafemPas encore d'évaluation
- Sirie 3 Mcaniq PDFDocument2 pagesSirie 3 Mcaniq PDFAbdo LlatifPas encore d'évaluation
- TD1 - Mécanique Du Point 2020-2021Document2 pagesTD1 - Mécanique Du Point 2020-2021Ibrahima KonatePas encore d'évaluation
- Série de TD n1Document2 pagesSérie de TD n1Achiaou FahdPas encore d'évaluation
- Série 2 Théorèmes Généraux CorrDocument7 pagesSérie 2 Théorèmes Généraux Corrsalem nourPas encore d'évaluation
- Cours CinématiqueDocument8 pagesCours CinématiqueAsyncrite BAKASSAPas encore d'évaluation
- MMCSérie 1Document4 pagesMMCSérie 1abahawi07Pas encore d'évaluation
- MR Serie Exo 1Document3 pagesMR Serie Exo 1fz bfsPas encore d'évaluation
- TD2 Mouvement RelatifDocument3 pagesTD2 Mouvement Relatifkhledfadi8Pas encore d'évaluation
- TD Cinetik Et Dynamik 2023Document10 pagesTD Cinetik Et Dynamik 2023n6hnf4pmpsPas encore d'évaluation
- TD2 MécaniqueDocument3 pagesTD2 MécaniqueamenmhedhbiiPas encore d'évaluation
- Correction-Exo-3-TD No-3-SMI-S1-ABDocument5 pagesCorrection-Exo-3-TD No-3-SMI-S1-ABAbdel ouameurPas encore d'évaluation
- Exercice 1Document6 pagesExercice 1Houssam FerrahPas encore d'évaluation
- Cours Mécanique Des Systèmes de Solides Et de Points MatérielsDocument118 pagesCours Mécanique Des Systèmes de Solides Et de Points MatérielsAly GAMALEDDYNPas encore d'évaluation
- ForcecentraleDocument11 pagesForcecentralelilia Bennaceur FarahPas encore d'évaluation
- Exercices Corriges Geometrie Dans Le PlanDocument20 pagesExercices Corriges Geometrie Dans Le Planred75% (4)
- Lois de NewtonDocument2 pagesLois de NewtonsocranedeoufPas encore d'évaluation
- 02 Chap 2 Caracteristiques Geometriques Des Sections PlanesDocument8 pages02 Chap 2 Caracteristiques Geometriques Des Sections Planesm72054980Pas encore d'évaluation
- Polycopié Des Travaux Dirigés de Mécanique Du PointDocument43 pagesPolycopié Des Travaux Dirigés de Mécanique Du PointNisrine Nisrinita50% (2)
- Devoir de Ratrapage Mecanique Du PointDocument2 pagesDevoir de Ratrapage Mecanique Du PointPreparation TafemPas encore d'évaluation
- Travaux Diriges de Mecanique - Medecine - PharmacieDocument8 pagesTravaux Diriges de Mecanique - Medecine - Pharmacieadjidavibruno7Pas encore d'évaluation
- Examen de Rattrapage SMPCSMIA 2018 2019Document5 pagesExamen de Rattrapage SMPCSMIA 2018 2019Rachif MesrarPas encore d'évaluation
- TD Meca Point 1Document18 pagesTD Meca Point 1Fatima Zohra El GharbaouiPas encore d'évaluation
- CH2 MsiDocument12 pagesCH2 MsiPierre Joel HounsouPas encore d'évaluation
- Série 03Document5 pagesSérie 03Dadiom AbdouPas encore d'évaluation
- Meca-Exos3 1011 PDFDocument6 pagesMeca-Exos3 1011 PDFkhalidPas encore d'évaluation
- Cours de Robotique - 3ème AT - VERSION 2021-29-49Document21 pagesCours de Robotique - 3ème AT - VERSION 2021-29-49Douaa GhazouaniPas encore d'évaluation
- Serie Speciale Physique 1 2020-2021Document2 pagesSerie Speciale Physique 1 2020-2021big bossPas encore d'évaluation
- Applications Des Lois de Newton Les Mouvements PlansDocument8 pagesApplications Des Lois de Newton Les Mouvements PlansArmand FofePas encore d'évaluation
- Ennoncé Pb2 TD4 - Examen MS 18-19Document2 pagesEnnoncé Pb2 TD4 - Examen MS 18-19mohaPas encore d'évaluation
- TR N°1 GME 2023 ÉtudiantDocument2 pagesTR N°1 GME 2023 ÉtudiantpieumedonovirgilePas encore d'évaluation
- Cinétique - Solide - Chapitre 2Document18 pagesCinétique - Solide - Chapitre 2HaniPas encore d'évaluation
- Fiche 2Document2 pagesFiche 2glokpaijeanjaures3Pas encore d'évaluation
- TD Angle OrienteDocument8 pagesTD Angle OrienteLefortyfour 4⃣4⃣Pas encore d'évaluation
- PC Resumé Des Cours Prepa BAC 2022Document42 pagesPC Resumé Des Cours Prepa BAC 2022Junior NibéPas encore d'évaluation
- Série 4-Ex1-MS - SMP3-2021Document1 pageSérie 4-Ex1-MS - SMP3-2021amine jodarPas encore d'évaluation
- 'Cours de Mécanique Du Point Matériel Partie 2' With YouDocument58 pages'Cours de Mécanique Du Point Matériel Partie 2' With YouDoha DohaPas encore d'évaluation
- Les Lois de Newton AIT EL MADANE 2024Document6 pagesLes Lois de Newton AIT EL MADANE 2024essataoufiqPas encore d'évaluation
- Chapitre 1 - MécaniqueDocument14 pagesChapitre 1 - MécaniqueSakhir GayePas encore d'évaluation
- Devoir À Rendre (Mécanique Rationnelle) ESGE-2023Document2 pagesDevoir À Rendre (Mécanique Rationnelle) ESGE-2023Toure Mame Coumba lamPas encore d'évaluation
- DS1-COR-Lavage PrepayeDocument4 pagesDS1-COR-Lavage PrepayeMouad MemniPas encore d'évaluation
- 05 Spectrometrie de Masse PDFDocument7 pages05 Spectrometrie de Masse PDFSalma OugriPas encore d'évaluation
- Imagerie OA 2016 1Document95 pagesImagerie OA 2016 1Flora ZePas encore d'évaluation
- Chapitre 3-Equations DifférentiellesDocument23 pagesChapitre 3-Equations DifférentiellesLøü LõüPas encore d'évaluation
- Le Dauphin Vol 68-Juin 2011Document44 pagesLe Dauphin Vol 68-Juin 2011GCACQPas encore d'évaluation
- DOSSIER - Les 10 Pistes Pour Créer Un Climat de Confiance Avec Ses CollaborateursDocument2 pagesDOSSIER - Les 10 Pistes Pour Créer Un Climat de Confiance Avec Ses CollaborateursLin EduPas encore d'évaluation
- Concentration Et Spécialisation DesDocument44 pagesConcentration Et Spécialisation DesFakher HouassaPas encore d'évaluation
- Cours - API Et Programmation L3 AutoDocument17 pagesCours - API Et Programmation L3 AutoimenenouvellePas encore d'évaluation
- A. Présentation Et Histoire: 2010: Le Produit A ÉtéDocument3 pagesA. Présentation Et Histoire: 2010: Le Produit A ÉtéManal DirabiPas encore d'évaluation
- E BookDocument13 pagesE BookBOUSSEN RIMPas encore d'évaluation
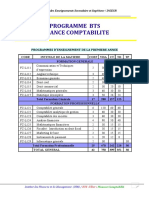
- Programme BTSDocument3 pagesProgramme BTSIssa KABOREPas encore d'évaluation
- Liliane PHANZU A Quoi Sert Le Contrôle de GestionDocument5 pagesLiliane PHANZU A Quoi Sert Le Contrôle de GestionLiliane Lina PhanzuPas encore d'évaluation
- Disjoncteur Moteur Magnetothermique ENTDocument3 pagesDisjoncteur Moteur Magnetothermique ENTMame ware DiagnePas encore d'évaluation
- Rapport de StageDocument19 pagesRapport de StageTurki DallaliPas encore d'évaluation
- Info Niv1 Cours2 FRDocument6 pagesInfo Niv1 Cours2 FRDjamilaTalebPas encore d'évaluation
- Ben Mostefa Daho WailDocument13 pagesBen Mostefa Daho Wailfaroukhan0808Pas encore d'évaluation
- Exercices Moteur AsynchroneDocument17 pagesExercices Moteur AsynchroneismailPas encore d'évaluation
- Chapitre IDocument6 pagesChapitre IHachani SafiaPas encore d'évaluation
- Une Technique Experimentale Et Son Utilisation en Évaluation: L'AutoradiographieDocument38 pagesUne Technique Experimentale Et Son Utilisation en Évaluation: L'AutoradiographieNada NadaPas encore d'évaluation
- Annexe TP4Document2 pagesAnnexe TP4Zied GandouziPas encore d'évaluation
- TttsDocument6 pagesTttsIslameddine2 BenzergaPas encore d'évaluation
- Seron 2008 Rééducation CognitiveDocument10 pagesSeron 2008 Rééducation CognitiveEnnio FioramontiPas encore d'évaluation
- LOGV0160 - Examen BlancDocument13 pagesLOGV0160 - Examen BlancsaPas encore d'évaluation
- Annales Médico-Psychologiques, Revue Psychiatrique Volume 172 Issue 8 2014 (Doi 10.1016/j.amp.2014.08.009) Purper-Ouakil, Diane - Le Trouble Disruptif Avec Dysrégulation de L'humeurDocument4 pagesAnnales Médico-Psychologiques, Revue Psychiatrique Volume 172 Issue 8 2014 (Doi 10.1016/j.amp.2014.08.009) Purper-Ouakil, Diane - Le Trouble Disruptif Avec Dysrégulation de L'humeurmariasr7Pas encore d'évaluation
- Conte Rendu de TP1 AdoDocument18 pagesConte Rendu de TP1 Adoyassine choukriPas encore d'évaluation
- TrajectoiresDocument8 pagesTrajectoiresDenis TuralicPas encore d'évaluation
- Exercices Avec Solutions Sur Le Processus StochastiquesDocument15 pagesExercices Avec Solutions Sur Le Processus Stochastiquessahnoune aliPas encore d'évaluation
- Chapitre - 1-Présontation-Du-ProjetDocument21 pagesChapitre - 1-Présontation-Du-ProjetAbdelhak GuettiPas encore d'évaluation
- AL7SN12TEPA0111 Corriges Des Activites Partie 01Document99 pagesAL7SN12TEPA0111 Corriges Des Activites Partie 01GadhoumiWalidPas encore d'évaluation
- 1730e Hydro-India BD-1Document2 pages1730e Hydro-India BD-1christianPas encore d'évaluation