Vous aimerez peut-être aussi
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Examen de Conception Mecanique 2009 CorrigeDocument16 pagesExamen de Conception Mecanique 2009 Corrigebhsbhs19Pas encore d'évaluation
- 43 Exercices EngrenageDocument9 pages43 Exercices EngrenageIlyas MhammediPas encore d'évaluation
- Accouplement TPDocument4 pagesAccouplement TPBouabdellaoui saif ennasrPas encore d'évaluation
- Projet D'introduction Robot Ericc StatiqueDocument5 pagesProjet D'introduction Robot Ericc StatiquefaycaldjemmadPas encore d'évaluation
- Weberj - APP1 Groupe2 CorrigeDocument17 pagesWeberj - APP1 Groupe2 CorrigeJoel VeingahPas encore d'évaluation
- MecaniqueDocument14 pagesMecaniqueMarc HauserPas encore d'évaluation
- app8-TAPIS DE COURSEDocument12 pagesapp8-TAPIS DE COURSEfaroukPas encore d'évaluation
- TpChaineSolides CorrigéDocument9 pagesTpChaineSolides CorrigéImen HammoudaPas encore d'évaluation
- Exercice BE2 Ensam MeknesDocument8 pagesExercice BE2 Ensam MeknesThe ShadowPas encore d'évaluation
- AE GM Liaison - Pivot-Roul LightDocument32 pagesAE GM Liaison - Pivot-Roul LightSimoMonkadPas encore d'évaluation
- Td3 StatiqueDocument10 pagesTd3 StatiqueYaye Anta DiopPas encore d'évaluation
- TP RDM03Document9 pagesTP RDM03belakebicelinaPas encore d'évaluation
- 5-Td-Scie A BoisDocument4 pages5-Td-Scie A BoisC'est Yana100% (2)
- TP Pont en Treillis West Point Bridge ELEVE V3Document17 pagesTP Pont en Treillis West Point Bridge ELEVE V3NesboardPas encore d'évaluation
- Palmeroy APP3Document27 pagesPalmeroy APP3Joel VeingahPas encore d'évaluation
- PFE CFM Mettre en Place Le Transport Des ExigencesDocument9 pagesPFE CFM Mettre en Place Le Transport Des ExigencesZaroui Benamor AliPas encore d'évaluation
- Devoir A RendreDocument2 pagesDevoir A RendresoufianePas encore d'évaluation
- TP1 SPE SympactDocument15 pagesTP1 SPE SympactPenda NiassPas encore d'évaluation
- Sujet 5Document4 pagesSujet 5Amin ChabchoubPas encore d'évaluation
- Elements FinisDocument15 pagesElements FinisYounesHamoudiPas encore d'évaluation
- TP Scie SauteuseDocument5 pagesTP Scie SauteuseremivsnPas encore d'évaluation
- Systeme Arc TirantDocument8 pagesSysteme Arc TirantGiovanni VicicontePas encore d'évaluation
- 1-Liaisons en Parallèles: X Z Z XDocument12 pages1-Liaisons en Parallèles: X Z Z XLarbi Elbakkali100% (1)
- 4813 Epreuve E4 Bts Mci Session 2014 Pages 1 22 PDFDocument24 pages4813 Epreuve E4 Bts Mci Session 2014 Pages 1 22 PDFMed Ali MaatougPas encore d'évaluation
- TD 19 - Lois Entrée-Sortie en Position Et en VitesseDocument10 pagesTD 19 - Lois Entrée-Sortie en Position Et en Vitessebhs channel100% (2)
- tp03 Cric 1112Document8 pagestp03 Cric 1112Serge SoursouPas encore d'évaluation
- ZainabDocument32 pagesZainabAbdessamad EzzoubayduPas encore d'évaluation
- Transmissions Par Roues Et Chaînes: Principales CaractéristiquesDocument7 pagesTransmissions Par Roues Et Chaînes: Principales CaractéristiquesAmîñê FãPas encore d'évaluation
- Transmettre-2SMB Eleve 2014Document81 pagesTransmettre-2SMB Eleve 2014mdrougui100% (8)
- 13 Poulie CourroiesDocument13 pages13 Poulie Courroieszouhour brahmiPas encore d'évaluation
- Polycopie de TD 2013Document70 pagesPolycopie de TD 2013hichamkabel100% (1)
- Pont - Roulant BENJADDADocument19 pagesPont - Roulant BENJADDAKhouloud BenjaddaPas encore d'évaluation
- Joints AccouplementsDocument4 pagesJoints Accouplementscharly mounkamPas encore d'évaluation
- CCP Tsi 2016 (Sujet) RDMDocument2 pagesCCP Tsi 2016 (Sujet) RDMMohamed El HajjamPas encore d'évaluation
- TD Guidage en Translation 20-21Document6 pagesTD Guidage en Translation 20-21meryPas encore d'évaluation
- TD19 1Document5 pagesTD19 1WafaPas encore d'évaluation
- Sec CCP 2004 Si PSIDocument30 pagesSec CCP 2004 Si PSImabdallah_688628Pas encore d'évaluation
- tp04 BDV 1112Document5 pagestp04 BDV 1112Serge SoursouPas encore d'évaluation
- Sequence2 Chapitre3 Exo BonusDocument4 pagesSequence2 Chapitre3 Exo Bonusمهدي الرقيقPas encore d'évaluation
- tp05 Roue Vis 1112Document4 pagestp05 Roue Vis 1112Serge SoursouPas encore d'évaluation
- Exam 2010 PresentationDocument20 pagesExam 2010 PresentationRamzi MansouriPas encore d'évaluation
- Chap4 Tr-Poulies Courroies PDFDocument10 pagesChap4 Tr-Poulies Courroies PDFAyouubPas encore d'évaluation
- Rapport-Final-Projet-Geotéchnique 1122158551Document13 pagesRapport-Final-Projet-Geotéchnique 1122158551SimoZorganePas encore d'évaluation
- 2904 Porteuse Motorisee Mecanique PDFDocument17 pages2904 Porteuse Motorisee Mecanique PDFJawher SalemPas encore d'évaluation
- 02 MECA0444-EffortsTransmission PDFDocument64 pages02 MECA0444-EffortsTransmission PDFKhaled SouaissaPas encore d'évaluation
- TD Boite de CommandeDocument2 pagesTD Boite de CommandeYoussef Trimech100% (1)
- Reducteur de VitesseDocument26 pagesReducteur de Vitesseamjed_de_enim67% (3)
- Cours Mec Tome 2Document62 pagesCours Mec Tome 2Rodolphe AmoiPas encore d'évaluation
- Mini ProjetDocument3 pagesMini ProjetPaulin TordeurPas encore d'évaluation
- Apsim CNC Sii MP Psi 2020Document13 pagesApsim CNC Sii MP Psi 2020Lamiaa CherkaPas encore d'évaluation
- Réducteur À Arbre CreuxDocument10 pagesRéducteur À Arbre CreuxBouker Mohamed100% (1)
- Modélisation Bond Graph AMESimDocument14 pagesModélisation Bond Graph AMESimjeanPas encore d'évaluation
- Simul MCCDocument22 pagesSimul MCCAbdallah BelabbesPas encore d'évaluation
- REDUCTEUR DE VITESSE MEMOIRE Corrigé 2 1 1Document15 pagesREDUCTEUR DE VITESSE MEMOIRE Corrigé 2 1 1Rebhi Akram oualidPas encore d'évaluation
- Petit Projet ConceptionDocument6 pagesPetit Projet Conceptionqazplm 1029Pas encore d'évaluation
- MecaniqueDocument18 pagesMecaniqueStephane Durel MbidaPas encore d'évaluation
- 215-1 - Maths - ED Méthodes Numériques D - OptimisationDocument3 pages215-1 - Maths - ED Méthodes Numériques D - OptimisationjeanPas encore d'évaluation
- 215-1 - Maths - Compte Rendu Méthodes D - Optimisation NumériqueDocument17 pages215-1 - Maths - Compte Rendu Méthodes D - Optimisation NumériquejeanPas encore d'évaluation
- Projet Modelisation MOCN CDC V2Document23 pagesProjet Modelisation MOCN CDC V2jeanPas encore d'évaluation
- RapportDocument25 pagesRapportjeanPas encore d'évaluation
- Rapport TP1 EEA Beltran CharrierDocument10 pagesRapport TP1 EEA Beltran CharrierjeanPas encore d'évaluation
- Rapport D'exercice Sur L'utilisation de l'IA RDocument7 pagesRapport D'exercice Sur L'utilisation de l'IA RjeanPas encore d'évaluation
- Modélisation Bond Graph AMESimDocument14 pagesModélisation Bond Graph AMESimjeanPas encore d'évaluation
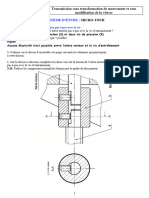
- Etude D'axe de Machine Outils Pour Jumeaux NumériqueDocument14 pagesEtude D'axe de Machine Outils Pour Jumeaux NumériquejeanPas encore d'évaluation
- Rapport Transformation D'une Presse Hydraulique Manuel en ElectriqueDocument17 pagesRapport Transformation D'une Presse Hydraulique Manuel en ElectriquejeanPas encore d'évaluation
- Cours Chaines de Puissance 2015Document10 pagesCours Chaines de Puissance 2015semahPas encore d'évaluation
- Rapport Du Stage Licence PCDocument39 pagesRapport Du Stage Licence PCDjibi NiambéléPas encore d'évaluation
- CCMP PSI 2016 MicromanipulateurCompact SujetDocument28 pagesCCMP PSI 2016 MicromanipulateurCompact SujetMartin MaurerPas encore d'évaluation
- Iso 5393 2017 PDFDocument52 pagesIso 5393 2017 PDFbouazizPas encore d'évaluation
- LET61 - Commande Des Machines Electriques - Chapitres 1 Et 2 TD1 Et 2Document27 pagesLET61 - Commande Des Machines Electriques - Chapitres 1 Et 2 TD1 Et 2adnanPas encore d'évaluation
- Michel Pinard - La Commande Électronique Des Machines-Dunod (2013) PDFDocument416 pagesMichel Pinard - La Commande Électronique Des Machines-Dunod (2013) PDFSidahmed LarbaouiPas encore d'évaluation
- L3 GIM D Auto 4 Dernier TDDocument4 pagesL3 GIM D Auto 4 Dernier TDfofanaPas encore d'évaluation
- Cours PC 2bac SP International FR 23 2Document5 pagesCours PC 2bac SP International FR 23 2Morgan merda100% (1)
- Cours Compresseur AxialDocument9 pagesCours Compresseur AxialNassima HamaidiPas encore d'évaluation
- Devoir1 1S1Document12 pagesDevoir1 1S1PFE100% (2)
- Exos MCCDocument11 pagesExos MCCDé NizPas encore d'évaluation
- TD 2 (Ex & Sol)Document17 pagesTD 2 (Ex & Sol)eto 03100% (4)
- CHAPITRE 1-Introduction A La Resistance Des Materiaux 23-24Document10 pagesCHAPITRE 1-Introduction A La Resistance Des Materiaux 23-24Marouan MohammediPas encore d'évaluation
- Commande - Des.machines - Chap1.introduction 2020Document79 pagesCommande - Des.machines - Chap1.introduction 2020Abdø AboulQasimPas encore d'évaluation
- Dimensionnement D'un Systeme D Entraînement: Exercice #1Document24 pagesDimensionnement D'un Systeme D Entraînement: Exercice #1Fethi Baroudi50% (4)
- Equilibre D'un Solide Mobile AutourDocument2 pagesEquilibre D'un Solide Mobile Autourhakima032100% (3)
- 2 Cours Du Chapitre1 Dipole ElectriqueDocument5 pages2 Cours Du Chapitre1 Dipole Electriqueyugensh2Pas encore d'évaluation
- TD29 Induction de LorentzDocument5 pagesTD29 Induction de LorentzTahirou FanePas encore d'évaluation
- Cours Hydraulique 76 Variation Cylindree Moteurs RapidesDocument2 pagesCours Hydraulique 76 Variation Cylindree Moteurs Rapideslahcen boudaoudPas encore d'évaluation
- Travail Et Puissance 2020Document3 pagesTravail Et Puissance 2020Mamadou saliou Ba100% (3)
- 2014 - Bac - STLB - Metropole - Sept - 2014 - Correction - UdppcDocument10 pages2014 - Bac - STLB - Metropole - Sept - 2014 - Correction - Udppchiba ben saihPas encore d'évaluation
- QCM 17 HelicesDocument10 pagesQCM 17 HelicesAbdelaziz Abdo100% (1)
- TD MCC+ Hacheur1Document4 pagesTD MCC+ Hacheur1hassna ait aliPas encore d'évaluation
- TMCDocument11 pagesTMCJean AbelaPas encore d'évaluation
- Feuilletage 1114Document30 pagesFeuilletage 1114anouchPas encore d'évaluation
- Chap 2Document22 pagesChap 2abouloifaPas encore d'évaluation
- Page de Garde Master 2Document8 pagesPage de Garde Master 2Khadija ZiregPas encore d'évaluation
- Théoréme Des 3 MomentsDocument5 pagesThéoréme Des 3 MomentsAhmed Wheatley MouloudiPas encore d'évaluation