Vous aimerez peut-être aussi
- TP1 AutomatiqueDocument29 pagesTP1 AutomatiqueMaryPas encore d'évaluation
- Cours SALC Ch4Document11 pagesCours SALC Ch4Licence1 espPas encore d'évaluation
- Chapitre VDocument10 pagesChapitre VminkoominPas encore d'évaluation
- Devoir Libre 1Document15 pagesDevoir Libre 1Lamyae AMMARIPas encore d'évaluation
- LET62 - Regulation Industrielle - Chapitre 3 Et TD3Document14 pagesLET62 - Regulation Industrielle - Chapitre 3 Et TD3adnan100% (1)
- Compte Rendu Auto - CopieDocument18 pagesCompte Rendu Auto - CopieHanae MenounyPas encore d'évaluation
- TD8 - Correction SLDDocument27 pagesTD8 - Correction SLDanna.lux2001Pas encore d'évaluation
- Chapitre 3Document10 pagesChapitre 3mohamedmessahel754Pas encore d'évaluation
- Epreuve Automatique Mai 2013Document6 pagesEpreuve Automatique Mai 2013jobPas encore d'évaluation
- Td5 Regulation IndustrielleDocument8 pagesTd5 Regulation IndustrielleZakaria Bencherki100% (1)
- Chap 3Document10 pagesChap 3mohamedmessahel754Pas encore d'évaluation
- TP2 Ombredane ClaudinDocument15 pagesTP2 Ombredane ClaudinEL MATADORPas encore d'évaluation
- Correcteursv3Document9 pagesCorrecteursv3James Clerk MaxwellPas encore d'évaluation
- TP 5: Synthèse D'un PID Numérique: I. Transposition Des Correcteurs ContinusDocument11 pagesTP 5: Synthèse D'un PID Numérique: I. Transposition Des Correcteurs Continussouaf.hedilPas encore d'évaluation
- Automatique TD3!22!23 AEHDocument2 pagesAutomatique TD3!22!23 AEHHamza ElouiPas encore d'évaluation
- TD 05Document2 pagesTD 05meriemfrik2Pas encore d'évaluation
- TPSIMULINKDocument6 pagesTPSIMULINKlilasaid2010Pas encore d'évaluation
- TP 3 Version FinalDocument18 pagesTP 3 Version FinalZH HamzaPas encore d'évaluation
- TD3 CSLDocument4 pagesTD3 CSLgamerzxs681Pas encore d'évaluation
- Cahier Exercices PIDDocument12 pagesCahier Exercices PIDGrue Volante100% (7)
- BOUSEBA GPC Compte RenduDocument6 pagesBOUSEBA GPC Compte RenduÜbü NtüPas encore d'évaluation
- TD6 - Regulateurs PDFDocument4 pagesTD6 - Regulateurs PDFbenlamlih100% (1)
- Controle Auto S3 2006Document4 pagesControle Auto S3 2006Riche MabouilaPas encore d'évaluation
- Exposé AutomatiqueDocument25 pagesExposé AutomatiqueExode Christ GuiellePas encore d'évaluation
- M2 INST Elem - Reg NumDocument6 pagesM2 INST Elem - Reg NumMehdi LaserPas encore d'évaluation
- Exam Cin 2 R22 Rattrapage 2Document11 pagesExam Cin 2 R22 Rattrapage 2elisatorres83500Pas encore d'évaluation
- Aii2 RCNS TP1Document2 pagesAii2 RCNS TP1mouniaPas encore d'évaluation
- Chapitre 3 Correction Des Systeme Asservis LineairesDocument7 pagesChapitre 3 Correction Des Systeme Asservis LineairesZøů HåïŕPas encore d'évaluation
- TD2 RégulationDocument8 pagesTD2 RégulationsonamoffothierryPas encore d'évaluation
- TD Auto 4Document3 pagesTD Auto 4Mohamed HmamouchPas encore d'évaluation
- TD AutomatiqueDocument2 pagesTD AutomatiqueSerge Hermann MénéasPas encore d'évaluation
- Exercices Regulation HEI42TCDocument60 pagesExercices Regulation HEI42TCMohamed Ben Fredj79% (14)
- CompteRendu TP MCC AutomatiqueDocument13 pagesCompteRendu TP MCC AutomatiqueOuafaa BahaddouPas encore d'évaluation
- Chapitre 8Document11 pagesChapitre 8taibini ouidadPas encore d'évaluation
- Utomatique Ravaux Pratiques Éance N: 1 Asservissement en Vitesse D'une Machine À Courant ContinuDocument3 pagesUtomatique Ravaux Pratiques Éance N: 1 Asservissement en Vitesse D'une Machine À Courant ContinuPRIMEMYTHOPas encore d'évaluation
- TD 2Document2 pagesTD 2Marwa abouraPas encore d'évaluation
- Correcteur PIDDocument13 pagesCorrecteur PIDAdel AdelPas encore d'évaluation
- Support Cours Commande Analogique Master Electrotechnique10Document38 pagesSupport Cours Commande Analogique Master Electrotechnique10Nappa NabilPas encore d'évaluation
- 2 Structure PidDocument7 pages2 Structure PidBoukari Abdoulaye IdrissaPas encore d'évaluation
- UTBM Science-Des-Materiaux 2000 GM PDFDocument23 pagesUTBM Science-Des-Materiaux 2000 GM PDFYasmine MokhtariPas encore d'évaluation
- TP Automatique MATLABDocument27 pagesTP Automatique MATLABZhor Ezzaam75% (8)
- ch1 3eme PartieDocument7 pagesch1 3eme Partiesid aliPas encore d'évaluation
- TP 4 MatlabDocument9 pagesTP 4 MatlabFatimaezzahraa SouadPas encore d'évaluation
- 144 Tdautomatique Tsi SpeDocument4 pages144 Tdautomatique Tsi SpeYoussef SadikPas encore d'évaluation
- Travaux Dirigés Régulation Ind. 21Document54 pagesTravaux Dirigés Régulation Ind. 21Amina LazregPas encore d'évaluation
- TP FinalDocument34 pagesTP FinalAhmed MsfPas encore d'évaluation
- Sys Ass L3 TD n6Document2 pagesSys Ass L3 TD n6OUSSAMA BOUZEGAOUPas encore d'évaluation
- Régulation Industrielle ExerciceDocument13 pagesRégulation Industrielle ExerciceRidouan Hije100% (2)
- SA7 Correction Des S ADocument6 pagesSA7 Correction Des S ANarimen MassariPas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- TP Cours ArduinoDocument5 pagesTP Cours ArduinoMohamed LahninePas encore d'évaluation
- Approximation Du Modèle Géométrique Inverse D'un Robot Manipulateur Par Les Réseaux de Neurones ArtificielsDocument70 pagesApproximation Du Modèle Géométrique Inverse D'un Robot Manipulateur Par Les Réseaux de Neurones ArtificielsMohamed LahninePas encore d'évaluation
- TP5 MLPDocument5 pagesTP5 MLPMohamed LahninePas encore d'évaluation
- Installation PythonDocument5 pagesInstallation PythonMohamed LahninePas encore d'évaluation
- TP Simulation Onduleur Pont MixteDocument2 pagesTP Simulation Onduleur Pont MixteMohamed LahninePas encore d'évaluation
- Activité - Trame ClavierDocument10 pagesActivité - Trame ClavierMohamed LahninePas encore d'évaluation
- TP Scilab BodeDocument11 pagesTP Scilab BodeMohamed LahninePas encore d'évaluation
- BTS ELECTROTECHNIQUE Lycée Antonin Artaud: Essais de SystemesDocument2 pagesBTS ELECTROTECHNIQUE Lycée Antonin Artaud: Essais de SystemesMohamed LahninePas encore d'évaluation
- RakotoarimangaJeanYS ESPA MAST 18Document73 pagesRakotoarimangaJeanYS ESPA MAST 18Mohamed LahninePas encore d'évaluation
- Codeur Inc Trans CDocument6 pagesCodeur Inc Trans CMohamed LahninePas encore d'évaluation
- Asservissement de Vitesse PID D'un Moteur À Courant Continu MCC À Aimant PermanentDocument15 pagesAsservissement de Vitesse PID D'un Moteur À Courant Continu MCC À Aimant PermanentAli MEDJGHOUPas encore d'évaluation
- TD Bascules+Compteursl+CorrectionDocument11 pagesTD Bascules+Compteursl+CorrectionCharaf Jra75% (28)
- 5.moteurs À Courant ContinuDocument68 pages5.moteurs À Courant ContinuMohamed LahninePas encore d'évaluation
- 4.transfo MonophDocument18 pages4.transfo MonophMohamed LahninePas encore d'évaluation
- 2 TriphaseDocument13 pages2 TriphaseMohamed LahninePas encore d'évaluation
- 3.piles Et BatteriesDocument15 pages3.piles Et BatteriesMohamed LahninePas encore d'évaluation
- 1.sources Primaires Sources SecondairesDocument12 pages1.sources Primaires Sources SecondairesMohamed LahninePas encore d'évaluation
- Energie Solaire PhotovoltaiqueDocument18 pagesEnergie Solaire PhotovoltaiqueNapss100% (2)
- Les CodeursDocument5 pagesLes CodeursMohamed LahninePas encore d'évaluation
- TD Capteurs GLDocument2 pagesTD Capteurs GLMohamed LahninePas encore d'évaluation
- TD CodeursDocument6 pagesTD CodeursMohamed Lahnine100% (2)
- TD AscenceurDocument1 pageTD AscenceurMohamed Lahnine100% (1)
- 143 1 Complements PDFDocument6 pages143 1 Complements PDFMiguel Clovis KamPas encore d'évaluation
- TD CapteurDocument1 pageTD CapteurMohamed LahninePas encore d'évaluation
- 39 Chapitre3 2018Document14 pages39 Chapitre3 2018Mohamed LahninePas encore d'évaluation
- 146 Onduleurs Cours ProfesseurDocument15 pages146 Onduleurs Cours ProfesseurMohamed LahninePas encore d'évaluation
- TD CapteurDocument1 pageTD CapteurMohamed LahninePas encore d'évaluation
- 145 Analyse Des Systemes AsservisDocument9 pages145 Analyse Des Systemes AsservisMohamed LahninePas encore d'évaluation
- 145 Analyse Des Systemes AsservisDocument9 pages145 Analyse Des Systemes AsservisMohamed LahninePas encore d'évaluation
- 146 Onduleurs Cours ProfesseurDocument15 pages146 Onduleurs Cours ProfesseurMohamed LahninePas encore d'évaluation
- Radiolocman 2015 / 08Document70 pagesRadiolocman 2015 / 08Александр БорисовPas encore d'évaluation
- CT 183Document36 pagesCT 183Danic Toffessi YaptaPas encore d'évaluation
- Hacheur - Série 1 PDFDocument2 pagesHacheur - Série 1 PDFADAM DAFERPas encore d'évaluation
- FR 171220 111254 ME VmarUd PDFDocument18 pagesFR 171220 111254 ME VmarUd PDFYynn FerdinandPas encore d'évaluation
- Contenu Composant ElectroniqueDocument5 pagesContenu Composant ElectroniqueSidiPas encore d'évaluation
- EMD STRM2 - 2019 (Rattrapage) (Corrigé)Document4 pagesEMD STRM2 - 2019 (Rattrapage) (Corrigé)nait amara zaidPas encore d'évaluation
- Arduino Pour Les NulsDocument4 pagesArduino Pour Les NulsBenabdoPas encore d'évaluation
- TD1: Synthèse VHDL: Exercice 1Document2 pagesTD1: Synthèse VHDL: Exercice 1Mohamed Aziz Ben RomdhanePas encore d'évaluation
- TP1 Resistivite Feuille ResultatDocument2 pagesTP1 Resistivite Feuille ResultatHajar TouilPas encore d'évaluation
- Faisceaux Hertziens Analogiques PDFDocument2 pagesFaisceaux Hertziens Analogiques PDFLauren100% (1)
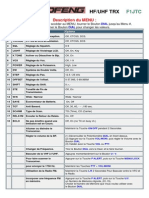
- Aide Mémoire Du BAOFENG UV-3RDocument2 pagesAide Mémoire Du BAOFENG UV-3RbenchycoolPas encore d'évaluation
- Cours 1Document64 pagesCours 1lllcarinolllPas encore d'évaluation
- Composant Actifs Pour L'électronique de Puissance PDFDocument288 pagesComposant Actifs Pour L'électronique de Puissance PDFRomaysa jijiPas encore d'évaluation
- Memento Do2000Document6 pagesMemento Do2000ZoubaierPas encore d'évaluation
- NE555 en Bascules Monostable Et AstableDocument6 pagesNE555 en Bascules Monostable Et AstablevyasnaikoPas encore d'évaluation
- Foldback CurrentDocument2 pagesFoldback CurrentAchraf TourkiPas encore d'évaluation
- Partie5 Parametres S PDFDocument62 pagesPartie5 Parametres S PDFNisrine Bahri67% (3)
- 332 Doc6Document66 pages332 Doc6Joy UpPas encore d'évaluation
- TD Electronique Analogique: Universite Mohammed Premier Ensa - OujdaDocument5 pagesTD Electronique Analogique: Universite Mohammed Premier Ensa - Oujdaamine vayPas encore d'évaluation
- Automate TSX 37 PDFDocument10 pagesAutomate TSX 37 PDFLASSAADPas encore d'évaluation
- Alim TDDocument30 pagesAlim TDkoneelias.0200Pas encore d'évaluation
- French Guide Rapide Tailles 1 A 4 M200-201 - (0478-0073)Document66 pagesFrench Guide Rapide Tailles 1 A 4 M200-201 - (0478-0073)9kdp2jhkcrPas encore d'évaluation
- Réponse Fréquentielle Des Systèmes Linéaires-Chapitre 3Document26 pagesRéponse Fréquentielle Des Systèmes Linéaires-Chapitre 3Youness KacharPas encore d'évaluation
- B11 TP PDFDocument15 pagesB11 TP PDFAouatif AouatifoPas encore d'évaluation
- TP2: Synthèse de Filtres Numériques RII: Réaliser ParDocument24 pagesTP2: Synthèse de Filtres Numériques RII: Réaliser ParSarra Sdiri100% (1)
- 07 CHP Electrostat TD EnonceDocument4 pages07 CHP Electrostat TD EnonceYoussef MahdiPas encore d'évaluation
- Elec FiltresDocument124 pagesElec FiltresF_A_13Pas encore d'évaluation
- Algebre Relationnelle PDFDocument30 pagesAlgebre Relationnelle PDFalios221Pas encore d'évaluation
- Trame MICDocument35 pagesTrame MIChelmiultras100% (6)
- Les Automates Programmables IndustriellesDocument13 pagesLes Automates Programmables Industriellessaad ratbiPas encore d'évaluation