Vous aimerez peut-être aussi
- Série 4-Ex1-MS - SMP3-2021Document1 pageSérie 4-Ex1-MS - SMP3-2021amine jodarPas encore d'évaluation
- Cours MMC-chap2Document9 pagesCours MMC-chap2Ikram BelPas encore d'évaluation
- 1) Cours Cinetique DynamiqueDocument11 pages1) Cours Cinetique DynamiqueChaima LajiliPas encore d'évaluation
- MSI Unité de Fermeture (Énoncé+Doc - Rép.)Document16 pagesMSI Unité de Fermeture (Énoncé+Doc - Rép.)Sirine Ben HmidenePas encore d'évaluation
- Chapitre IDocument18 pagesChapitre IMamadou BambaPas encore d'évaluation
- 1BAC SM & Biof Prof: Fayssal Lycee Abde El MoumenDocument2 pages1BAC SM & Biof Prof: Fayssal Lycee Abde El Moumenimed ouniPas encore d'évaluation
- TD Cinetik Et Dynamik 2023Document10 pagesTD Cinetik Et Dynamik 2023n6hnf4pmpsPas encore d'évaluation
- Résumé Produit Scalaire Plan 1bacDocument1 pageRésumé Produit Scalaire Plan 1bacjilalixmcPas encore d'évaluation
- Exercice 1Document6 pagesExercice 1Houssam FerrahPas encore d'évaluation
- Audio-Raideur-Masse Équivalentes Dune PoutreDocument23 pagesAudio-Raideur-Masse Équivalentes Dune PoutreMouad NabilPas encore d'évaluation
- Ennoncé Pb2 TD4 - Examen MS 18-19Document2 pagesEnnoncé Pb2 TD4 - Examen MS 18-19mohaPas encore d'évaluation
- Wa0000.Document2 pagesWa0000.akarne YounessPas encore d'évaluation
- Résumé CinétiqueDocument11 pagesRésumé CinétiqueAB lifestylePas encore d'évaluation
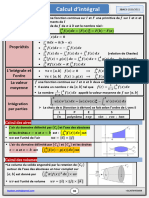
- Calcul IntegralDocument1 pageCalcul IntegralAbdelKarim dergoulPas encore d'évaluation
- Chapitre 3 Torseur de CohésionDocument3 pagesChapitre 3 Torseur de CohésionSiwar AbbesPas encore d'évaluation
- Wa0003.Document8 pagesWa0003.a.akraouche2585Pas encore d'évaluation
- Examen-MS-Ss Rattrapage2020-21Document2 pagesExamen-MS-Ss Rattrapage2020-21amine jodarPas encore d'évaluation
- Flexion Des PlaquesDocument6 pagesFlexion Des PlaquesMasque De MortPas encore d'évaluation
- Cours Torseur de Cohesion Torseur Des Efforts InterieursDocument17 pagesCours Torseur de Cohesion Torseur Des Efforts InterieursMesi CyrilPas encore d'évaluation
- Solution+Examen Mécanique Du Solide 2023Document4 pagesSolution+Examen Mécanique Du Solide 2023King Strong BoyPas encore d'évaluation
- ccmp 1 2019 corrigéDocument3 pagesccmp 1 2019 corrigéaybche90Pas encore d'évaluation
- Institut Supérieur Des Etudes Technologiques de Nabeul: Devoir Surveille Mecanique GeneraleDocument3 pagesInstitut Supérieur Des Etudes Technologiques de Nabeul: Devoir Surveille Mecanique GeneralelamiabejaouiPas encore d'évaluation
- Examen Mécanique de PointDocument9 pagesExamen Mécanique de PointMdzayd EL Fahime100% (1)
- Chapitre Vii PDFDocument11 pagesChapitre Vii PDFHatim ElfoudaliPas encore d'évaluation
- Examen-MS-Ss Normale2022 - 23Document2 pagesExamen-MS-Ss Normale2022 - 23amine jodarPas encore d'évaluation
- Série Meca Solide N°4 2019Document4 pagesSérie Meca Solide N°4 2019mark jenkoPas encore d'évaluation
- Résumé Cours Nombres ComplexesDocument2 pagesRésumé Cours Nombres Complexeshiba06hiba1234Pas encore d'évaluation
- Dimensionnement de Structures 4-CisaillementDocument9 pagesDimensionnement de Structures 4-CisaillementLabassi SlehPas encore d'évaluation
- Chapitre 1Document9 pagesChapitre 1glokpaijeanjaures3Pas encore d'évaluation
- Cours CinématiqueDocument8 pagesCours CinématiqueAsyncrite BAKASSAPas encore d'évaluation
- Résumé Cour Complexe-2bac - SMDocument2 pagesRésumé Cour Complexe-2bac - SMSven Way83% (6)
- Exammen Appliquée Statique2022Document6 pagesExammen Appliquée Statique2022bellaliz.ssaPas encore d'évaluation
- Eolienne - SujetDocument6 pagesEolienne - SujetZineb AjemPas encore d'évaluation
- TD2 MM1 - PC1 - 2023 - 2024Document3 pagesTD2 MM1 - PC1 - 2023 - 2024alianisoinaanti2Pas encore d'évaluation
- Série de TD n2Document2 pagesSérie de TD n2Achiaou FahdPas encore d'évaluation
- Ensa 2Document4 pagesEnsa 2ybenguennyPas encore d'évaluation
- Exemples Résolus Oscillations AmortiesDocument3 pagesExemples Résolus Oscillations Amortiesrayhanadouaab1Pas encore d'évaluation
- Exam 2018 19 L3Document3 pagesExam 2018 19 L3rayane abbasPas encore d'évaluation
- Chapitre 1. Opérateurs Des Champs - Cours Partie A - ElectromagnétismeDocument10 pagesChapitre 1. Opérateurs Des Champs - Cours Partie A - Electromagnétisme96mt61tr90Pas encore d'évaluation
- 1614451963703_2020-2021_TD2_MG_MIA_PCDocument7 pages1614451963703_2020-2021_TD2_MG_MIA_PCfredericcascoPas encore d'évaluation
- "Examen" de Mécanique Des Solides Indéformables: Responsable Du Module: PR H. Ait RimouchDocument3 pages"Examen" de Mécanique Des Solides Indéformables: Responsable Du Module: PR H. Ait RimouchAlexis James0% (1)
- Cours 1Document2 pagesCours 1Zakaria EzziyadiPas encore d'évaluation
- TD Cinématique Roulement Sans GlissementDocument3 pagesTD Cinématique Roulement Sans GlissementimadPas encore d'évaluation
- Examen MS SN 21 22 Final PDFDocument2 pagesExamen MS SN 21 22 Final PDFamine jodarPas encore d'évaluation
- MDF1 CinématiqueDocument9 pagesMDF1 CinématiquezeblaouarPas encore d'évaluation
- Chapitre Geométrie de MasseDocument26 pagesChapitre Geométrie de MasseNEXOPas encore d'évaluation
- 12255Document7 pages12255youssefbenguenny4Pas encore d'évaluation
- CN 2021 (Dyn) Doc RépDocument10 pagesCN 2021 (Dyn) Doc RépSirine Ben HmidenePas encore d'évaluation
- CORRIGE Ex1-SERIE 2Document2 pagesCORRIGE Ex1-SERIE 2SOUFIANE BOURCHIHPas encore d'évaluation
- COURSRDM RDM BiskraDocument180 pagesCOURSRDM RDM BiskraBoushaba BachirPas encore d'évaluation
- Série 5 MS 23-24Document3 pagesSérie 5 MS 23-24landry dossahPas encore d'évaluation
- Organigramme Ba 2Document2 pagesOrganigramme Ba 2Youcef BenmoussaPas encore d'évaluation
- Devoir en Mécanique Des Milieux Continus 12 PDFDocument8 pagesDevoir en Mécanique Des Milieux Continus 12 PDFlinaPas encore d'évaluation
- Produit Scalaire Etude AnalytiqueDocument5 pagesProduit Scalaire Etude AnalytiqueJaouad FilaliPas encore d'évaluation
- 2018 Concours Centrale Supélec Physique Chimie 2 MP Corrige 1Document4 pages2018 Concours Centrale Supélec Physique Chimie 2 MP Corrige 1r_berthetPas encore d'évaluation
- CH2 MsiDocument12 pagesCH2 MsiPierre Joel HounsouPas encore d'évaluation
- TD 2 MMCDocument3 pagesTD 2 MMCsouhayb elmanssouriPas encore d'évaluation
- Série 1Document2 pagesSérie 1ralicaPas encore d'évaluation
- Dynamique de Rotation PDFDocument11 pagesDynamique de Rotation PDFNouhaila InnanPas encore d'évaluation
- Equivalence Du ADocument1 pageEquivalence Du Aamine jodarPas encore d'évaluation
- Liste Admis B2D2Document1 pageListe Admis B2D2amine jodarPas encore d'évaluation
- 2-4 EquationsDocument16 pages2-4 Equationsamine jodarPas encore d'évaluation
- La Théorie de La Fonctionnelle de La Densité Et Ses Applications en NanotechnologieDocument25 pagesLa Théorie de La Fonctionnelle de La Densité Et Ses Applications en Nanotechnologieamine jodarPas encore d'évaluation
- 2007 6 Structure Hyperfine Et Effet Zeeman de HDocument4 pages2007 6 Structure Hyperfine Et Effet Zeeman de Hamine jodarPas encore d'évaluation
- SMP Programme Contrôle Session Automne 2022-2023 SMPDocument2 pagesSMP Programme Contrôle Session Automne 2022-2023 SMPamine jodarPas encore d'évaluation
- TD1 CorDocument9 pagesTD1 Coramine jodar100% (1)
- Série 2 CorrigéDocument10 pagesSérie 2 Corrigéamine jodarPas encore d'évaluation
- Examen-MS-Ss Normale2022 - 23Document2 pagesExamen-MS-Ss Normale2022 - 23amine jodarPas encore d'évaluation
- Feuilletage 325 PDFDocument19 pagesFeuilletage 325 PDFamine jodarPas encore d'évaluation
- Master - PAIP-S8 - Corrigé-TD1 - Magnétisme Dans Les Solides - BelaarajDocument7 pagesMaster - PAIP-S8 - Corrigé-TD1 - Magnétisme Dans Les Solides - Belaarajamine jodarPas encore d'évaluation
- CV Tarek El Bardouni 2Document17 pagesCV Tarek El Bardouni 2amine jodarPas encore d'évaluation
- EXAM v1Document4 pagesEXAM v1amine jodarPas encore d'évaluation
- Info Equivalence Des Notes AllemandesDocument1 pageInfo Equivalence Des Notes Allemandesamine jodar100% (1)
- Tableau Conversion Notes 2Document2 pagesTableau Conversion Notes 2amine jodarPas encore d'évaluation
- Examen-MS-Ss Rattrapage2020-21Document2 pagesExamen-MS-Ss Rattrapage2020-21amine jodarPas encore d'évaluation
- Master 60 - Instrumentation en Phys Des Interactions FondamentalesDocument2 pagesMaster 60 - Instrumentation en Phys Des Interactions Fondamentalesamine jodarPas encore d'évaluation
- Titre 1Document1 pageTitre 1Aina HermanPas encore d'évaluation
- These FJDocument208 pagesThese FJPedro SaldiasPas encore d'évaluation
- Serie 2Document5 pagesSerie 2satima omPas encore d'évaluation
- 11-Energie Thermique Exos CorrDocument7 pages11-Energie Thermique Exos CorrAbdoulaye Amine Sadadine100% (2)
- Télécharger Cours Électromagnétisme PDF GratuitDocument7 pagesTélécharger Cours Électromagnétisme PDF Gratuitgranza27730% (1)
- TT KS PDFDocument168 pagesTT KS PDFhakima ellouzaniPas encore d'évaluation
- Devoir de Synthèse N°2 Collège Pilote - Physique - 7ème (2015-2016) Mme Hanen OthmaniDocument5 pagesDevoir de Synthèse N°2 Collège Pilote - Physique - 7ème (2015-2016) Mme Hanen Othmaniمها الخميريPas encore d'évaluation
- Etude Des Proprietés Structural Et Modelisation Des Poudres PDFDocument144 pagesEtude Des Proprietés Structural Et Modelisation Des Poudres PDFMrdjPas encore d'évaluation
- Etude Comparative D'une Ligne Coplanaire Par L'utilisation de Trois MéthodesDocument6 pagesEtude Comparative D'une Ligne Coplanaire Par L'utilisation de Trois MéthodesFa Mido ChemseddinePas encore d'évaluation
- Renflex v4-1Document6 pagesRenflex v4-1lezardPas encore d'évaluation
- RLC FORC Webé PDFDocument2 pagesRLC FORC Webé PDFIbrahima NdiayePas encore d'évaluation
- Impédance Méthode Sur PieuxDocument6 pagesImpédance Méthode Sur PieuxdurotPas encore d'évaluation
- Physique Tles DCEF Capitre 7 - COURS OSCILLATIONS MECANIQUESDocument6 pagesPhysique Tles DCEF Capitre 7 - COURS OSCILLATIONS MECANIQUESprécieux le dignitairePas encore d'évaluation
- Travaux Diriges N1 PDFDocument4 pagesTravaux Diriges N1 PDFHamza LiberadosPas encore d'évaluation
- Insulators 84 91Document8 pagesInsulators 84 91Francisco HernandezPas encore d'évaluation
- L'eau en Tant Que Système Rédox (József ORSZÁGH)Document15 pagesL'eau en Tant Que Système Rédox (József ORSZÁGH)GérardPas encore d'évaluation
- Correction-Exo-3-TD No-3-SMI-S1-ABDocument5 pagesCorrection-Exo-3-TD No-3-SMI-S1-ABAbdel ouameurPas encore d'évaluation
- Devoir À Rendre (Mécanique Rationnelle) ESGE-2023Document2 pagesDevoir À Rendre (Mécanique Rationnelle) ESGE-2023Toure Mame Coumba lamPas encore d'évaluation
- OscilloscopeDocument5 pagesOscilloscopelilasaid2010Pas encore d'évaluation
- CHAPITRE 1 - AbsorptionDocument15 pagesCHAPITRE 1 - AbsorptionAya KhaouidPas encore d'évaluation
- Chapitre 2 (Influence de La Température Sur La Position Du Niveau de Fermi)Document13 pagesChapitre 2 (Influence de La Température Sur La Position Du Niveau de Fermi)MEed E-tanPas encore d'évaluation
- Mécanique de Solide - TDDocument12 pagesMécanique de Solide - TDMoùm Mèd'Pas encore d'évaluation
- Elt 044 2Document14 pagesElt 044 2Thi Thanh Tam NguyenPas encore d'évaluation
- Corrige Td3 P&C Gcv2 IpsasDocument30 pagesCorrige Td3 P&C Gcv2 IpsasAmin Jamoussi50% (2)
- Chap2 - Environnement - de - Propagation 2021 (Students) PDFDocument26 pagesChap2 - Environnement - de - Propagation 2021 (Students) PDFsloPas encore d'évaluation
- Electricite TransportDocument13 pagesElectricite TransportelkhalfiPas encore d'évaluation
- Etude Systemes PDFDocument10 pagesEtude Systemes PDFkhocinePas encore d'évaluation
- CCP Sii MP 2018 SujetDocument20 pagesCCP Sii MP 2018 SujetSaad KingPas encore d'évaluation
- Recueil-des-Résumés CRIP 2017Document50 pagesRecueil-des-Résumés CRIP 2017SamaPas encore d'évaluation
- Cours de Mécanique Chapitre 1 2020-2021Document15 pagesCours de Mécanique Chapitre 1 2020-2021Abiibatou NdiayePas encore d'évaluation
- TP 2Document8 pagesTP 2عبدالسلام ارفيسPas encore d'évaluation
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieD'EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieÉvaluation : 5 sur 5 étoiles5/5 (2)
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- 160 ressources pour se lancer dans la vidéo quand on n’y connait rienD'Everand160 ressources pour se lancer dans la vidéo quand on n’y connait rienPas encore d'évaluation
- Approvisionnement et traitement de l’eau: Les Grands Articles d'UniversalisD'EverandApprovisionnement et traitement de l’eau: Les Grands Articles d'UniversalisPas encore d'évaluation
- Anatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursD'EverandAnatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursPas encore d'évaluation
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- La vie des abeilles: Prix Nobel de littératureD'EverandLa vie des abeilles: Prix Nobel de littératureÉvaluation : 4 sur 5 étoiles4/5 (41)
- Transformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitD'EverandTransformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitÉvaluation : 4 sur 5 étoiles4/5 (14)
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Harmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020D'EverandHarmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Cahier de jeux de stimulation cognitive: Sujets Alzheimer, désorientés, démences, amnésiesD'EverandCahier de jeux de stimulation cognitive: Sujets Alzheimer, désorientés, démences, amnésiesPas encore d'évaluation
- Cancer - Leucémie: Et autres maladies apparemment incurables, mais guérissables avec des moyens naturelsD'EverandCancer - Leucémie: Et autres maladies apparemment incurables, mais guérissables avec des moyens naturelsPas encore d'évaluation
- Enseigner une Langue Etrangère Par l’Apprentissage HybrideD'EverandEnseigner une Langue Etrangère Par l’Apprentissage HybridePas encore d'évaluation
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Conception & Modélisation CAO: Le guide ultime du débutantD'EverandConception & Modélisation CAO: Le guide ultime du débutantPas encore d'évaluation
- Le B.A.-Ba de la communication: Comment convaincre, informer, séduire ?D'EverandLe B.A.-Ba de la communication: Comment convaincre, informer, séduire ?Évaluation : 3 sur 5 étoiles3/5 (1)
- Puissance naturelles - Que faire si votre "meilleure partie" est en grève?: Puissance naturelles-améliorer les recours pour augmenter la virilité de la capacité à obtenir une érection de fermetéD'EverandPuissance naturelles - Que faire si votre "meilleure partie" est en grève?: Puissance naturelles-améliorer les recours pour augmenter la virilité de la capacité à obtenir une érection de fermetéÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Semer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumeD'EverandSemer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumePas encore d'évaluation
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaD'EverandL'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaÉvaluation : 3 sur 5 étoiles3/5 (1)