Vous aimerez peut-être aussi
- Dynamique: Les Grands Articles d'UniversalisD'EverandDynamique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Les BarragesDocument18 pagesLes Barrageshasna zahri100% (1)
- Village de BarovieDocument30 pagesVillage de BarovieChris Eevee100% (2)
- Forces CentralesDocument22 pagesForces CentralesCharaf LeoPas encore d'évaluation
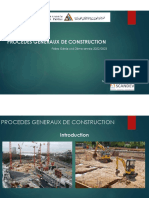
- Organisation Générale D'un Chantier PDFDocument65 pagesOrganisation Générale D'un Chantier PDFhasna zahri100% (1)
- Le Cour de La CriminologieDocument5 pagesLe Cour de La CriminologieNoureddine Abatourab25% (4)
- Calcul - Pony - Massonnet (Enregistré Automatiquement)Document3 pagesCalcul - Pony - Massonnet (Enregistré Automatiquement)hasna zahri100% (1)
- MMC Rji 8Document18 pagesMMC Rji 8hasna zahriPas encore d'évaluation
- Compte Rendu tp3Document6 pagesCompte Rendu tp3Ilyass HajriPas encore d'évaluation
- TD1 CorrectionDocument8 pagesTD1 CorrectionDaoud ElalouanyPas encore d'évaluation
- Correction Td1sticl12022vfDocument9 pagesCorrection Td1sticl12022vfEmna BrahmiPas encore d'évaluation
- A Retenir - MA - PartieA PDFDocument2 pagesA Retenir - MA - PartieA PDFMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Bousehaba Td1avec SolutionDocument4 pagesBousehaba Td1avec SolutionMeryeme M'HouhPas encore d'évaluation
- TD1 TM 2022Document13 pagesTD1 TM 2022Section E GP100% (1)
- R1.17 - Physique Industrielle - Pompe - 23-24Document10 pagesR1.17 - Physique Industrielle - Pompe - 23-24devauxlucasPas encore d'évaluation
- Fiche Résumé SiDocument8 pagesFiche Résumé SiSAMADPas encore d'évaluation
- Cinétique Des Solides 22 1Document13 pagesCinétique Des Solides 22 1Chacha ZapPas encore d'évaluation
- P146 - Cours (Mécanique Quantique - Alternatif)Document193 pagesP146 - Cours (Mécanique Quantique - Alternatif)brises parfuméesPas encore d'évaluation
- MMC Rji 12Document11 pagesMMC Rji 12hasna zahri100% (1)
- TD Propagation Guidée CorrectionDocument6 pagesTD Propagation Guidée Correctionsoumaya bsdPas encore d'évaluation
- Cours MMC-CHAPITRE 6 - Théorèmes Liés A Énergie +Document19 pagesCours MMC-CHAPITRE 6 - Théorèmes Liés A Énergie +Axel BekaertPas encore d'évaluation
- Méthode Des Éléments Finis-Avancée (CD)Document64 pagesMéthode Des Éléments Finis-Avancée (CD)Hassine TarekPas encore d'évaluation
- Corrigé - Série de T.D. N°2 Du TS 521Document7 pagesCorrigé - Série de T.D. N°2 Du TS 521Ryad SenhadjiPas encore d'évaluation
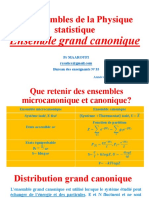
- Ensemble Grand CanoniqueDocument11 pagesEnsemble Grand CanoniqueMouna FgPas encore d'évaluation
- Conductuion Electrique Dans Les SolidesDocument32 pagesConductuion Electrique Dans Les SolidesCHAIMA DEHBIPas encore d'évaluation
- Fiche RésuméDocument8 pagesFiche RésuméAMINE ElamriPas encore d'évaluation
- Barre Propre PoidsDocument5 pagesBarre Propre PoidsHB RIMPas encore d'évaluation
- CH6-Ondes StationnairesDocument11 pagesCH6-Ondes StationnairesOUSSAMA AHAKKARPas encore d'évaluation
- ST 2an19 s3 Emd Physique2013Document8 pagesST 2an19 s3 Emd Physique2013ibtihal RNPas encore d'évaluation
- CORRIGÉ DE L'ÉPREUVE DE RATTRAPAGE Electromagnétisme 16-17Document6 pagesCORRIGÉ DE L'ÉPREUVE DE RATTRAPAGE Electromagnétisme 16-17minamina23007Pas encore d'évaluation
- Power PPDocument23 pagesPower PPJoseph Naja100% (1)
- PHY214 Chap1Document10 pagesPHY214 Chap1Theophile AdjiaPas encore d'évaluation
- Ondes Progressives Le Long D Une CordeDocument2 pagesOndes Progressives Le Long D Une CordeYoussef DahaniPas encore d'évaluation
- Interactions Maths-Physique 20-01Document10 pagesInteractions Maths-Physique 20-01RidersPas encore d'évaluation
- Poutre Isostatique1Document7 pagesPoutre Isostatique1IlayoPas encore d'évaluation
- TP MaglevDocument8 pagesTP MaglevMehdi HassinePas encore d'évaluation
- PHIPSAEEDocument19 pagesPHIPSAEEMVP MurkyPas encore d'évaluation
- 02AC3.1 - Modélisation Des Actions Mécaniques - 2023 ProfDocument6 pages02AC3.1 - Modélisation Des Actions Mécaniques - 2023 ProfSewa MensahPas encore d'évaluation
- MMC Rji 6Document6 pagesMMC Rji 6hasna zahriPas encore d'évaluation
- Geometrie Masse 1 16Document16 pagesGeometrie Masse 1 16fz bfsPas encore d'évaluation
- Correction TD3Document8 pagesCorrection TD3nadinerjaibi15Pas encore d'évaluation
- Chap II m1m2 GMDocument10 pagesChap II m1m2 GMnouraaPas encore d'évaluation
- Cours Complet Solides Deformables en Surface Theorie de HertzDocument17 pagesCours Complet Solides Deformables en Surface Theorie de HertzLéo MORINPas encore d'évaluation
- Calcul Des Paramètres ÉlectromagnétiquesDocument10 pagesCalcul Des Paramètres Électromagnétiquesamine milanoPas encore d'évaluation
- Cours MMC-CHAPITRE 4-Equations de ElastostatiqueDocument10 pagesCours MMC-CHAPITRE 4-Equations de ElastostatiqueAxel BekaertPas encore d'évaluation
- Cours de Macrodynamique-Chap4-L3-SECO3-PE-FSEGA, UnivDla-Dec2023Document7 pagesCours de Macrodynamique-Chap4-L3-SECO3-PE-FSEGA, UnivDla-Dec2023freddy coolbyPas encore d'évaluation
- Formulaire Q1 (2018-2019)Document4 pagesFormulaire Q1 (2018-2019)mavrinissue4Pas encore d'évaluation
- Devoir Libre N°1 Physique: Pour Le Lundi 21 Septembre 2020Document4 pagesDevoir Libre N°1 Physique: Pour Le Lundi 21 Septembre 2020Harakat ElhoucinePas encore d'évaluation
- DS10 CorrigéDocument10 pagesDS10 Corrigétomy.colinPas encore d'évaluation
- TPE Modélisation de La Combustion - Équation de Von KarmanDocument4 pagesTPE Modélisation de La Combustion - Équation de Von KarmanAMBADIANG Yves BertrandPas encore d'évaluation
- B A D C Q: Transformations Spontanés Dans Les PilesDocument1 pageB A D C Q: Transformations Spontanés Dans Les PilesSOUFIANE SAMAKAPas encore d'évaluation
- PanneDocument2 pagesPannePFEPas encore d'évaluation
- Cours MMC-CHAPITRE 5-Criteres de Limite ElastiqueDocument12 pagesCours MMC-CHAPITRE 5-Criteres de Limite ElastiqueAxel BekaertPas encore d'évaluation
- Compte Rendu Du Travaux Pratiques (Réparé) PDFDocument12 pagesCompte Rendu Du Travaux Pratiques (Réparé) PDFmohammed elloulouPas encore d'évaluation
- Chapitre 3 - Changement de RéférentielDocument10 pagesChapitre 3 - Changement de RéférentielHamza BoutlihPas encore d'évaluation
- Colle - 4 - SujetDocument4 pagesColle - 4 - SujetfqhkkfgpvrPas encore d'évaluation
- Elmt Corrigé ELE21 - Partiel Finsem1 Jan2021Document13 pagesElmt Corrigé ELE21 - Partiel Finsem1 Jan2021Tadessé NicolyPas encore d'évaluation
- Cours 1Document4 pagesCours 1ghadaPas encore d'évaluation
- 13 Exo Elect Solution Cours PHY104 2020 2021Document29 pages13 Exo Elect Solution Cours PHY104 2020 2021Isaacar Moye la SouzaPas encore d'évaluation
- Cours 1Document9 pagesCours 1Qwerty YtrewqPas encore d'évaluation
- Cor-Serie 5 - analyse-MIP-S2 Ham-AbdDocument5 pagesCor-Serie 5 - analyse-MIP-S2 Ham-Abdissamissammo04Pas encore d'évaluation
- Statique Du Solide - EssongDocument8 pagesStatique Du Solide - EssongPaul EssongPas encore d'évaluation
- TD N°4 MDFDocument10 pagesTD N°4 MDFEl Ami Ine100% (1)
- Ex Final 01 2020 CorrigéDocument3 pagesEx Final 01 2020 Corrigéamiira bouzouadaPas encore d'évaluation
- Relativité restreinte, mécanique quantique et relativité générale: Base physique et mathématique de la relativité restreinte et générale et de la mécanique quantiqueD'EverandRelativité restreinte, mécanique quantique et relativité générale: Base physique et mathématique de la relativité restreinte et générale et de la mécanique quantiquePas encore d'évaluation
- CP VF Lancement Projet Construction Autoroute Tit Mellil Berrechid 01072021Document2 pagesCP VF Lancement Projet Construction Autoroute Tit Mellil Berrechid 01072021hasna zahriPas encore d'évaluation
- Projet Auto-Nenjmaz (Stagiaire)Document86 pagesProjet Auto-Nenjmaz (Stagiaire)hasna zahriPas encore d'évaluation
- Bet Route 3ITDocument17 pagesBet Route 3IThasna zahriPas encore d'évaluation
- Bleu Et Rouge Blocs Diagonaux Ventes Rapport de Ventes PrésentationDocument36 pagesBleu Et Rouge Blocs Diagonaux Ventes Rapport de Ventes Présentationhasna zahriPas encore d'évaluation
- Economie Des Transports IT 2020 PDFDocument63 pagesEconomie Des Transports IT 2020 PDFhasna zahriPas encore d'évaluation
- 1 - Cas Pratique LGV Tanger - Kenitra (TOARC2)Document14 pages1 - Cas Pratique LGV Tanger - Kenitra (TOARC2)hasna zahriPas encore d'évaluation
- 3 - Pathologie Et Entretien Des Ouvrages Métalliques (HAFILI Oualid - EHTP - IT)Document68 pages3 - Pathologie Et Entretien Des Ouvrages Métalliques (HAFILI Oualid - EHTP - IT)hasna zahriPas encore d'évaluation
- MP Plaques Et Coques YAICH Souad - BARAKAT NouhailaDocument15 pagesMP Plaques Et Coques YAICH Souad - BARAKAT Nouhailahasna zahriPas encore d'évaluation
- Projet Pont 2GC34 2023Document20 pagesProjet Pont 2GC34 2023hasna zahriPas encore d'évaluation
- 2 - Pathologie Et Entretien Des Ouvrages en Maçonnerie (HAFILI Oualid - EHTP - IT)Document139 pages2 - Pathologie Et Entretien Des Ouvrages en Maçonnerie (HAFILI Oualid - EHTP - IT)hasna zahri100% (1)
- Transformee de FourierDocument147 pagesTransformee de Fourierhasna zahri100% (1)
- YAICH SOUAD - 3IT - Exam Pathologie Et Entretien Des Ponts 2020-2021Document10 pagesYAICH SOUAD - 3IT - Exam Pathologie Et Entretien Des Ponts 2020-2021hasna zahriPas encore d'évaluation
- Contrôle en Gestion Des Ressources Humaines 3it 3sig: Colorez en Bleu La Bonne Réponse (Une Seule Réponse Correcte)Document3 pagesContrôle en Gestion Des Ressources Humaines 3it 3sig: Colorez en Bleu La Bonne Réponse (Une Seule Réponse Correcte)hasna zahriPas encore d'évaluation
- MMC Rji 12Document11 pagesMMC Rji 12hasna zahri100% (1)
- Hydrologie Routière DLDocument19 pagesHydrologie Routière DLhasna zahriPas encore d'évaluation
- Examen 17juinDocument3 pagesExamen 17juinhasna zahriPas encore d'évaluation
- Organisation Générale D'un Chantier PDFDocument23 pagesOrganisation Générale D'un Chantier PDFhasna zahri100% (1)
- Dossier QualitéDocument1 pageDossier Qualitéhasna zahri100% (1)
- GPQDocument11 pagesGPQhasna zahriPas encore d'évaluation
- Dossier de Presse Survivre À La Peur (Piero San Giorgio) C&RDocument3 pagesDossier de Presse Survivre À La Peur (Piero San Giorgio) C&REditions TatamisPas encore d'évaluation
- Plaquette CLIMATECH FROIDDocument2 pagesPlaquette CLIMATECH FROIDkoum juniorPas encore d'évaluation
- TPcerveauspiro 2013Document32 pagesTPcerveauspiro 2013Bruce DO VANPas encore d'évaluation
- Guide Metrologie Greiner Bio OneDocument20 pagesGuide Metrologie Greiner Bio OneJaouad BarriPas encore d'évaluation
- TaichidubatonlongDocument2 pagesTaichidubatonlongCheck MatePas encore d'évaluation
- Analyse Sémiologique Du Graffiti 04160097 PDFDocument69 pagesAnalyse Sémiologique Du Graffiti 04160097 PDFJulio LealPas encore d'évaluation
- TPn-3 Intégration NumériqueDocument4 pagesTPn-3 Intégration Numériqueأيمن ادريباتPas encore d'évaluation
- Expose 8Document42 pagesExpose 8Pâm Maia MarquesPas encore d'évaluation
- Dut IsmaelDocument21 pagesDut IsmaelDjiddo MoussaPas encore d'évaluation
- Cours 1 1.1 - Évaluation - Mi Session - Ramon Arevalo - 2.27.2021Document6 pagesCours 1 1.1 - Évaluation - Mi Session - Ramon Arevalo - 2.27.2021Ramon ArevaloPas encore d'évaluation
- 26982381FRGROUPSFranais 3210796 Maroc Client Brief Protection Donnes Personnelles V2 WOCMDocument9 pages26982381FRGROUPSFranais 3210796 Maroc Client Brief Protection Donnes Personnelles V2 WOCMJosephPas encore d'évaluation
- ACFrOgABx5dsZuFjHgF16C1lCo9KQ4IMq9mF GZ1eYUaZfvkELDd6V1lDp Mk5qsPzxwSvBKKOP3t73xv5xQ7ZiGLhf6XCWSnO65a9QM5nmniIHjRjMTBvZAPLV-hRjCVFEgPzbt CGBIUqnvHQbDocument4 pagesACFrOgABx5dsZuFjHgF16C1lCo9KQ4IMq9mF GZ1eYUaZfvkELDd6V1lDp Mk5qsPzxwSvBKKOP3t73xv5xQ7ZiGLhf6XCWSnO65a9QM5nmniIHjRjMTBvZAPLV-hRjCVFEgPzbt CGBIUqnvHQbManar BahiPas encore d'évaluation
- Rapport de Stage Licence Professionnelle Analyse Et Conception D'un Système de FacturationDocument58 pagesRapport de Stage Licence Professionnelle Analyse Et Conception D'un Système de Facturationvictor perez ngounouPas encore d'évaluation
- Rapport de StageDocument5 pagesRapport de StageemiePas encore d'évaluation
- Architecture Reseau SecuriteDocument31 pagesArchitecture Reseau SecuriteOumar KOITAPas encore d'évaluation
- Avnt Pro Envi FinalDocument20 pagesAvnt Pro Envi FinalMick carterPas encore d'évaluation
- Generalites Sur Les CapteursDocument14 pagesGeneralites Sur Les Capteurssalahgim100% (1)
- Sujets de PFE - M2 MI - 2020 2021Document2 pagesSujets de PFE - M2 MI - 2020 2021ANAS ANASPas encore d'évaluation
- Maintenance Niveau 2Document94 pagesMaintenance Niveau 2Kenya Gomez100% (1)
- Droit CategorielDocument6 pagesDroit CategorielAntarese VIDEDANPas encore d'évaluation
- Inflexions 26 09Document233 pagesInflexions 26 09Inflexions100% (1)
- CommunicationDocument18 pagesCommunicationMaroua Zine El AbidinePas encore d'évaluation
- Le - DEMMANE Nadhira - 2 PDFDocument81 pagesLe - DEMMANE Nadhira - 2 PDFBenleumi ZeynebPas encore d'évaluation
- JNA 2021 Echelle Des DecibelsDocument2 pagesJNA 2021 Echelle Des Decibelsbaboo981Pas encore d'évaluation
- RTM Plan 11 AnneeDocument1 pageRTM Plan 11 Anneevsk.trashPas encore d'évaluation
- Genie LogicielDocument51 pagesGenie Logicielbig_med100% (1)
- Le Fragment ZouaghiDocument1 pageLe Fragment ZouaghiXtradipPas encore d'évaluation
- La Cuisine MoléculaireDocument10 pagesLa Cuisine MoléculairevictorburryPas encore d'évaluation